船舶DP系统在科考船中的应用
2020-05-26李文明于洋俞启军
李文明 于洋 俞启军

摘 要:针对大洋科考船在海洋科考作业中的特殊需求问题,结合大洋科考船几种关键作业特点,对船舶动力定位(Dynamic Positioning DP)系统的组成及其核心技术介绍,分析讨论船舶DP系统在大洋科考作业应用中的优越性,利用典型科考船的科考作业实践给予引证,并总结DP系统在科考作业应用中的注意事项,为业内拓展海上科考船DP系统的应用和新型DP科考船的整体设计提供一定指导和借鉴。
关键词:科考船;动力定位(DP);科考作业;应用
近年来我国海洋科考事业的发展迅速,陆续新造了“东方红3号”、“科学号”、“嘉庚号”、“大洋号”等先进科考船[1],科考船根据作业需求通常对其定点的作业能力、灵活的操作性能和低速航行性能等特定技术提出较高要求[2]。船舶DP系统以其稳定的控制系统和精准的定位能力也获得科考船舶的广泛应用。本文通过对科考船DP系统的介绍,利用典型案例论证船舶DP系统在科考实践中的应用优势,总结DP系统在科考船中应用领域的有关注意事项,为相关从业人员作为参考。
1 船舶DP系统的关键技术
船舶DP系统是船舶操纵控制系统综合运用计算机完成集成控制的一套系统,船舶DP控制系统是它的核心,并由具有核心技术的硬件和软件组成。
1.1 DP系统的最优LQ设计
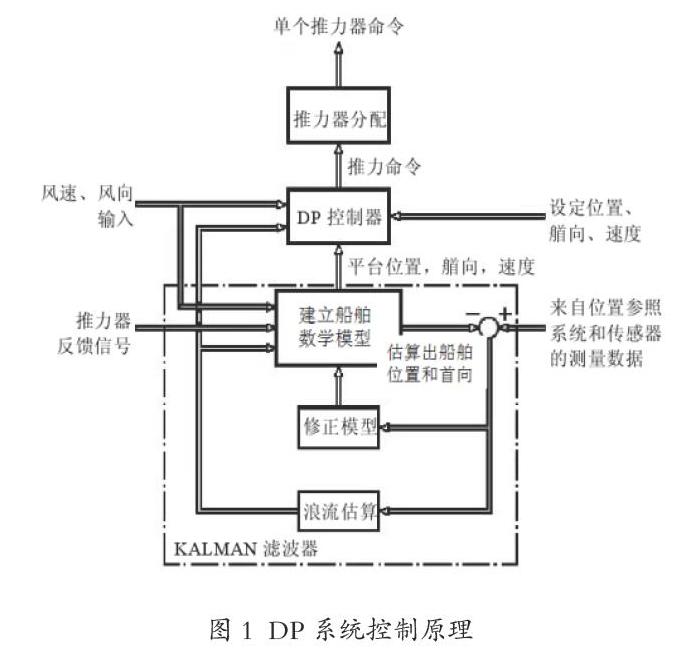
如图1 DP系统控制原理图所示,船舶DP系统采用线性二次型最优(LQ)控制律理论[3],通过控制器给出的推进器指令,即基于当前估计状态与期望状态的偏差和控制算法计算得到,最终由推进器系统为船舶提供抵抗外界环境力所需的推力和转矩。
1.2 精确位置参考系统
精确的位置信息是船舶DP系统实现准确定位的关键参数,船舶DP系统的位置参考单元主要有卫星定位、水声定位、微波激光定位和张紧索定位。以船舶采用的挪威Kongsberg水深定位系统HiPAP500为例:在其作用距离4000m时,定位精度可达0.2%,测向精度为≤0.12°,测距精度为≤0.10m[4]。利用DGPS定位是船舶DP系统广泛采用的一种定位方式,DPGS的差分技术可以有效的削弱因电离层延迟、星历误差和卫星钟等误差影响,可使船舶DP定位精度达到厘米级。
1.3 船舶运动传感器
在DP控制系统建模时,可通过船舶运动传感器能精准有效测量相关运动参数,输出高质量的船舶摇摆和垂荡等数据,及时准确地将船舶DGPS卫星天线和水声测量探头偏离船舶重心的位置进行修正,从而达到减少因测量单元假偏移导致的船舶定位误差。以船舶常用的Kongsberg Seatex MRU5 为例,其各项动态数据输出指标[3],参见表1 MRU5性能参数表。
2 大洋科考作业特点及其应用DP系统优势
大洋科考主要包括执行海底调查、深海浅钻、潜水支援、ROV 和AUV(自主式水下潜航器)布放回收、海上搜救等海上科学实验和应急任务,而船舶DP系统在科考船的应用能有效满足以上实验任务的严格要求,大幅降低船舶驾驶人员的作业强度,从而保障海上科考作业任务的安全完成。
2.1 大洋科考船作业特点
大洋科考船按其对船舶操纵要求特点可分为海上定点精确定位作业、海上机动操纵作业、海上低速指定轨迹作业等[5]。
(1)其中以深海矿机钻探、海底矿产取样等为代表的定点精确定位实验是对船舶操纵能力有着超高要求的作业。在深海开阔水域下,没有船舶DP系统的辅助,船驾人员很难获得有效的定位参考,并完成长时间的高精度船舶保持;
(2)以自主式水下潜航器(AUV)、波浪滑翔机布放回收为代表的海上机动操纵同样需要船驾人员合理调整船位,有效利用风流合力,完成各類科考实验的精贵设备施放与回收;
(3)以深水多波束扫描、水下AUV动态监控为代表的低速指定轨迹作业要求,则需综合利用风流合力对低速船舶操控影响提前做出分析,并按预定轨迹完成操纵,这对普通船舶的自动舵和手动操纵均难以达到DP科考船的应用效果。
2.2 应用DP系统优势
具有多项核心技术的船舶DP系统,不仅具有实现船舶精度可靠、性能稳定的船舶定点作业和预设条件评估的船舶DP能力,而且人机对话单元还可为驾驶者提供多种操作模式的选择同时还可实时汇总船舶运动姿态和作业环境的有效显示,为部分高危科考作业提供必要的安全评估等功能。
2.2.1 多选择的人机对话单元
船舶DP系统的人机对话单元操纵模式多样,系统功能强大。一方面,为DPO(DP Operator)提供多视觉的驾控位置选择,如DPO除可在船舶DP操控台上实现船舶DP操控外,还可利用船舶DP系统配备的移动式操纵杆控制终端(C-Wing Terminal)在船双舷侧、船头和科考船八角楼(科考船独特的综合集合设备操控室)等处完成船舶的远程操控,以保障船驾人员最佳的操纵视角,确保船舶安全操纵作业。
另一方面,船舶DP系统为DPO提供了更多更方便的操作模式选择,如:①操纵杆模式(Joystick Mode),通过该模式可实现对海洋科考船的一杆联动操控;②自动首向(Auto Heading),船舶艏向控制是船舶操纵的首要控制维度,该功能可减轻船驾者对艏向的过渡关注,使其集中精力用于控制船舶其他维度的运动控制和科考作业配合;③自动定位模式(Auto Position),船舶DP系统自动船位控制,DPO按需设定合适的首向和位置,DP系统自行控制多个推进器完成船位艏向的控制。④自主航行模式(Auto Track)和自动跟踪目标(Fellow Target),则可在船舶低速下实现预定轨迹的船舶自动航行,特别是自动跟踪目标功能,则可利用水声定位系统完成水下ROV或者AUV的近距离自动跟踪。
2.2.2 有效多元数据参考
船舶DP系统不仅能接收处理船舶位置和动态运动的各种参数用以建立船舶DP控制模型,而且能有效集成分析显示船舶运动控制所需参考数据,DPO提供信息源参考。
(1)外部环境数据。自由运动下的船舶主要受风和流的影响,船舶DP系统应用风置前馈控制原理[6],通过数学建模将其余外力归集为海流力,俗称为DP流。大洋开阔水域的科考作业由于陌生海域缺乏详实的海流资料,船舶DP系统所给定的DP流能相对合理地反应所受外界水动力的影响,为船舶操纵和科考设备的上下水作业风险评估提供重要参考。
(2)船位动态数据。船舶动态数据输出主要包括船舶实时艏向、位置和船舶运动趋势速度等,通过船舶DP系统的位置和艏向等参数设置,可以实现如船位偏差达3米和艏向偏差3°的警告与船位偏差达5米和艏向偏差5°的警报提示,用以提醒DP操作者船舶动态的偏差并及时有效地采取控制措施,更好的完成科考定位作业实验协助功能,如图2船舶动力定位显示单元所示。
(3)位置参考数据。船舶位置参考单元是DP系统的关键输出输入单元,超高精度的船舶定位取决于位置参考单元提供的信号精度。船舶水声定位和DGPS定位是科考船在开阔大洋的主要定位手段。船舶水声定位控制显示单元不仅能有效的监控船舶水声定位的输入参数,而且还可以有效监控水下移动信标的相对位置,用以识别定位水下科考设备如ROV、AUV等设备的实时位置,协助船舶DPO安全合理控制船位。此外船舶DGPS信号虽然不收距离限制,但其信号依然受晨昏蒙影、电离层异常及太阳黑子活动的影响,利用Kongsberg DPS200等系列DPGS处理单元能有效显示船舶定位时所用的卫星数量以及位置精度因子(PDOP)等参数,有利于DPO能合理调整各参考系统的权重比例,提高船舶DP控制的稳定性[7]。
(4)动力分配数据。船舶DP系统的显示单元可多种方式显示动力分配要素。在船舶显示主推进器的模式下,界面可通过柱状推力消耗百分比等信息为DPO提供各推进器的富余推力、合力总值和力矩总合,为DPO评估船舶定位能力以及操纵策略提供有力参考,特别是船舶处理遭遇强对流天气或者乱流时的紧急情况。此外在船舶推力分配设置上,船舶DPO还可以主动设置某一个或一组推进器的偏执设置,用以改善船舶的推进器的排出流对科考设备的上下水操纵影响[8]。
3 科考船DP系统应用案例
应用船舶DP系统不仅可以实现科考船的码头靠泊[9],DP系统更为重要的是应用在各类海上科考作业操纵和船舶应急,从而有效协助船驾人员确保任务顺利完成以保障船舶作业安全。本文以“大洋号”科考船DP系统应用为例,介绍船舶DP应用的典型案例。
3.1 科考设备的上下水操纵
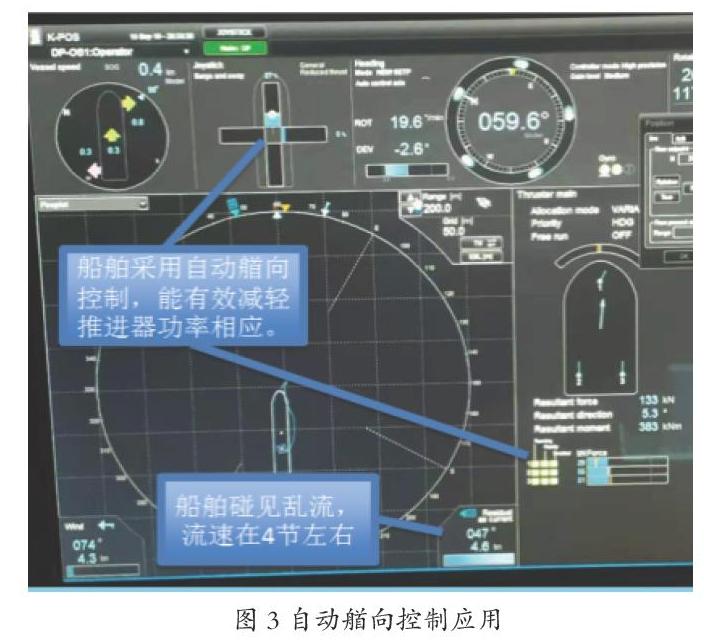
海洋科考设备中潜龙2号(AUV)不仅单体价值昂贵[10],而且此类AUV没有像ROV那样有脐带缆的链接,致使其上下水操作成为该类作业实践风险很高。在操作实践中,首先通过DP系统控制船舶获得船舶摇摆幅度最小的艏向,以便科考人员完成船舷内甲板上AUV的吊装并摆至舷外操作,然后根据DP系统计算外界流向、流力等,再及时调整船舶艏向,可以确保入水的潜龙2号快速远离大洋号船体及其推进器。同样在AUV回收过程时,如图3自动艏向控制应用所示,在船舶科考人员捕获潜龙四号将其引至船尾时,船舶DPO在低流速时调整推进器偏置或者高流速时采用自动艏向功能,可以减轻船舶推进器排出流对潜龙四号自航能力不足的缺陷,确保了AUV的安全快捷回收。
3.2 深水矿机的测试实验应用
以千米级别深海矿机海底钻探为例,深水矿机测试实验从设备入水到海底完成浅钻实验后再复原回船往往需要20多个小时,但一旦设备出现故障时间不可估计。“大洋号”在作业中利用船舶DP系统的辅助,协助深海钻机完成实验测试时的位置误差可在为2-3米以内,远远超过实验要求的25米标准。船舶驾驶人员还可通过船舶DP系统有效分析船舶动力定位能力,实时监控外界流向流速变化,以便船舶DPO能及早采取措施应对乱流等影响。
3.3 海上待命和台风应急
“大洋号”科考船在实验任务间歇期,经常需要船舶在附件海域待命以便等待新科考作业的准备工作。利用船舶DP系统的绿色定位功能,能实现船舶在设定待命圈子内保持艏向稳定的低速待命状态,既解决了深海无法抛锚而浪费燃油的问题,又有效减轻船舶横摇,为科考人员甲板作业和休息创造了良好的条件,大大的减轻了船驾人员的工作强度。
另外海上锚地抗风避台时,由于“大洋号”科考船的功能需求导致其上层建筑高大且风力中心靠前,不仅容易走锚,而且其在安全富余量较小的锚位抗台时,经常与周围货船转向相反形成紧张局面。应急抗台情况下,在充分考虑避风锚地的富余水深影响后,利用船舶DP系统用以辅助抗台也是非常成功的。
4 DP系统在科考船应用中的注意事项
随着我国大量新型科考船交付使用,船舶DP系统极大地提高了我国科考船舶的作业能力,但应用之余更应注意以下相关事项:
(1)多艘新型DP系统的科考船中陆续入列服役,必然造成科考船上持证DPO的紧缺,应加大对未完全取证人员的实操培训力度,特备是关键操作更应由持有DPO证书的人员操纵或监督下完成;
(2)船舶DP系统功能强大且操作模式多样化,DPO应充分开发DP各项功能和合理应用各类操纵模式,并注意科考船应急情况的处理和经验积累,切记过渡依靠船舶DP系统各项应用;
(3)船舶DP系统应需经过培训的轮机人员加强日常维护保养,并根据规定做好DP系统的年度检验和五年特检,以保障船舶DP系统软、硬件持续可靠性;
(4)船舶DP系统中的设备经常与科考船的科考设备形成重复配置,如海上气象观测系统的风速仪,水声定位系统以及船舶运动参考单元(MRU)等,如在设计之初能有效统一整合,更能有效利用科考船的各类综合设备形成资源共享,提升船舶设备和空间的使用价值,降低船舶建造和运营成本。
5 结论
海洋科考,装备先行,海洋科考设备的多样化、智能化和高精化快速发展,使得作为各类海洋科考设备的船舶载体提出了更加多样化、多功能的要求,同时也对科考船的驾驶人员提出了更高的船舶操纵要求。船舶DP系统地广泛应用,必将进一步满足海洋科考各类海洋科学考察的特殊需求,减轻科考作业人员的工作强度和作业风险,实现各类科考调查实验的高效设计,促进我国科考调查对大洋资源和环境更加深入和全面的调查研究工作。
参考文献:
[1] 劉旸. 科学考察船的内部系统化管理方法探究[J]. 珠江水运,2019,03: 103-104.
[2] 刘方琦. 我国需要怎样的科考船?[N]. 中国水运报. 2018-6-22.
[3] 边信黔,付明玉,王元慧.船舶动力定位[M].北京: 科学出版社,2011.
[4] 韩健, 姚武军, 宋建强. 水声定位在平台动力定位中的发展和现状[J].舰船科学技术,2009,30(10): 7-10.
[5] 王立松,李欣,张士中,等. 电力推进技术在海洋科考船上的应用[J]. 船舶工程,2016,38(4): 22-25, 69.
[6] 李博. 动力定位系统的环境力前馈研究[D]. 上海, 上海交通大学, 2013.01: 78-80.
[7] 王桥倩. 动力定位系统测量数据的多级融合方法研究[D]. 哈尔滨,哈尔滨工程大学,2016: 13-16.
[8] 章建峰,詹佳,董九洋,等. 船舶动力定位系统的总体设计[J]. 船舶工程, 2019(41):208-211.
[9] 俞启军,张浩然,谢博文,等. “向阳红01”利用动力定位靠鳌山卫科考船码头方案[J].航海技术,2019,(5): 1-4.
[10] 赵羿羽,曾晓光,金伟晨. 海洋科考装备体系构建及发展方向研究[J]. 舰船科学技术,2019,41(19): 1-6.
基金资助项目:国家自然科学基金项目 (51379026)
