象虫计数器的连杆机构的设计分析研究*
2020-03-25李君帅惠延波汪杨智禹军安白路遥
李君帅,惠延波,汪杨智,周 颖,禹军安,白路遥
(河南工业大学 先进制造研究所,河南 郑州 450007)
0 引 言
象虫具有较多种类,而其中米象与玉米象是世界上危害最大、具有毁灭性的仓库害虫。在粮食、中药材、外贸、食品、农副土特品仓库及其加工厂里,对贮藏物资危害极大[1]。象虫的任何一种都列为被检疫的对象,限制其传播和蔓延的范围,对虫害的防治提出了更高的要求[2]。而对象虫的计数与统计是实现虫害预测与防治的重要前提。因此,研发高效合理的计数与统计装置对虫害的防治研究具有重要意义。目前,对于象虫的密度调查,主要是抽样调查,人工计数为主。人工计数工作时间长,象虫体积较小,对其计数十分耗时耗力。此外,估计计数难以精确计算出象虫的准确数量。因此,计数准确高效、性能稳定可靠的象虫计数装置也成为了研究的重点。
目前,市面上的计数产品主要是针对固体颗粒(药片[3],宝石[4]等),机械零件(螺母,轴承等)等计数,运用排序机对其排序处理。但是,由于象虫体积小,易运动,市场上的计数产品无法对其排序处理,难以完成对象虫数量上的统计。本文通过观察象虫习性,设计一套新的连杆装置来对象虫计数,并使用3D打印技术成型制造,实现了象虫的自动计数并具有较高的效率和准确率。
传统的象虫计数器由空气压缩机连接分离装置和三角瓶组成,用人工逐个查数手持负压吸头将象虫吸入三角瓶内完成计数收集。根据象虫离地爬动的习性,创新设计四杆机构收集象虫并在输送管道内安装光纤计数器来代替人工计数。
1 米象运动速率的计算与试验
采用王殿轩在不同温度下米象的运动行为研究的研究方法[5],在室温下(25 ℃)计算米象的运动速度。在平面无粮情况下,害虫爬行速率水温度升高的回归方程为y=2.841x-30.313。x=25 ℃带入回归方程得害虫的爬行速率为40.712 cm/min。
将米象置于带有刻度的玻璃试管中,并在试管内竖直方向间隔擦拭聚四氟乙烯(米象难以爬过涂有聚四氟乙烯的内壁),用以防止米象侧向爬行,将200只象虫置于试管底部,试虫为昆虫研究室培养数代后羽化2周的成虫。在室温下,将试管底部挡板撤出,米象自然上爬,多次试验记录爬行数据,计算均值。得出象虫在静止躯体的运动速度为40 cm/min。实验结果基本一致。
根据象虫的运动特性,设计工作流程如图1所示。
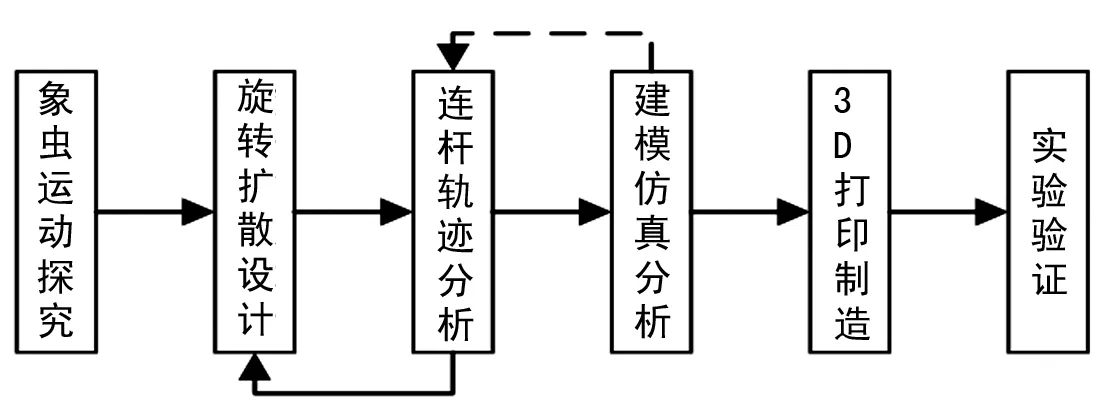
图1 主要工作流程
2 连杆机构与扩散器的设计方法及策略
连杆机构的末端执行器是吸头安装位置,故连杆末端的轨迹也表示管道吸头吸取米象的路径。扩散器是让密集的象虫在内壁上通过爬行扩散开,实现象虫的均布传送并消除堆叠现象。扩散器内壁则需要连杆末端轨迹偏移一定距离,并以偏离后的曲线旋转形成扩散器内壁轮廓曲线(如图2)。所以连杆的设计确定了扩散器的内壁轮廓形状,扩散器的大小约束连杆杆长的取值。确定发生微小偏移量时,根据象虫的高度约为1~2.5 mm,实验测得吸头吸取象虫的最远距离为6 mm,取偏移距离为4 mm,目的是防止吸头堵塞、推落象虫或吸力不足无法吸取的情况发生。
象虫初步筛选后,进入扩散分离装置内,再通过连杆吸头逐一进入计数传感器,完成计数抓取。连杆进行回转运动,扩散器进行自转运动,则吸头相对于扩散器做回转的螺旋运动。连杆设计的轨迹规划和扩散器设计是整个计数系统的关键。
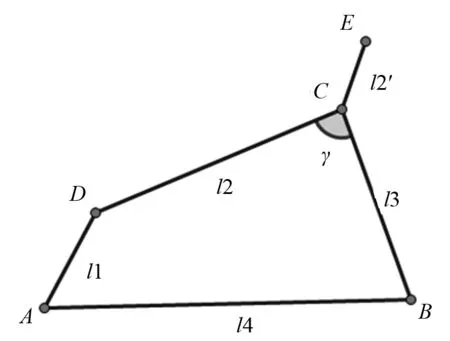
图2 曲柄摇杆机构运动学关系
2.1 四杆机构的约束确定
四杆机构末端的运动轨迹受杆长的影响。根据运动规律可分为曲柄摇杆机构、双曲柄机构、双摇杆机构[6]。 由空间布置及连杆末端运动规律的约束列方程组对各杆杆长进行范围约束取值。
根据设计要求,该机构为曲柄摇杆机构(如图2),l2、l2′杆固连。点E处安装计数器吸头。根据运动规律有以下关系式:
(1) 对各杆的杆长进行约束计算:
f1(X)=l1-l2≤0
(1)
f2(X)=l1-l3≤0
(2)
f3(X)=l1-l4≤0
(3)
f4(X)=l1+l4-l2-l3≤0
(4)
f5(X)=l1+l2-l3-l4≤0
(5)
f6(X)=l1+l3-l2-l4≤0
(6)
(2) 连杆与摇杆的夹角应在γmin和γmax之间,即:
(7)
(8)
由于计数器的尺寸限制,根据设计要求,已知l1和l4的长度分别为30 mm和60 mm。设l2和l3的长度分别为x1和x2。为了防止从动件卡死,只允许连杆与摇杆的夹角在20°~160°变化。将数值带入则得:
f1(x)=30-x1≤0
f2(x)=30-x2≤0
f4(x)=90-x1-x2≤0
f5(x)=x1-x2-30≤0
f6(x)=x2-x1-30≤0
(3) 连杆约束的绘制
运用MATLAB,对x1和x2的取值范围进行求解[7],得到如下可行域(如图3),并得到曲线交点坐标为(58.5640,32.7149),(32.7149,58.5640)。
以10 mm为间隔,根据可行域对不同值的杆长进行末端轨迹仿真分析,则可行域内l2和l3杆长的取值如表3、4(√表示杆长满足条件)。
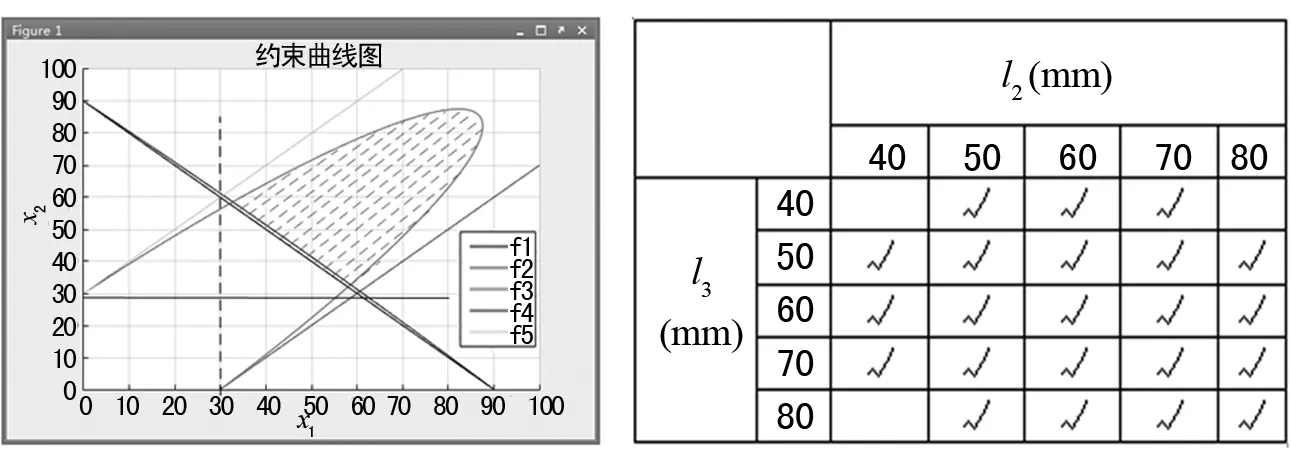
图3 可行域约束曲线图4 轨迹模拟正交实验表
2.2 在可行域内对连杆的末端运动轨迹进行仿真
(1) 轮廓曲线的绘制。运用软件对连杆可行域内数值进行正交实验轨迹仿真如图5。
(2) 连杆曲线分析与选定
连杆曲线取选根据扩散器外型轮廓要求应满足以下标准:①曲线无交叉,保证内壁表面光滑无尖端;②轮廓表面平缓且具有足够的长度,保证象虫的均布扩散;③旋转器的自转一周时间应是象虫从底部到扩散器顶部时间,避免象虫在扩散器顶部的堆叠现象。
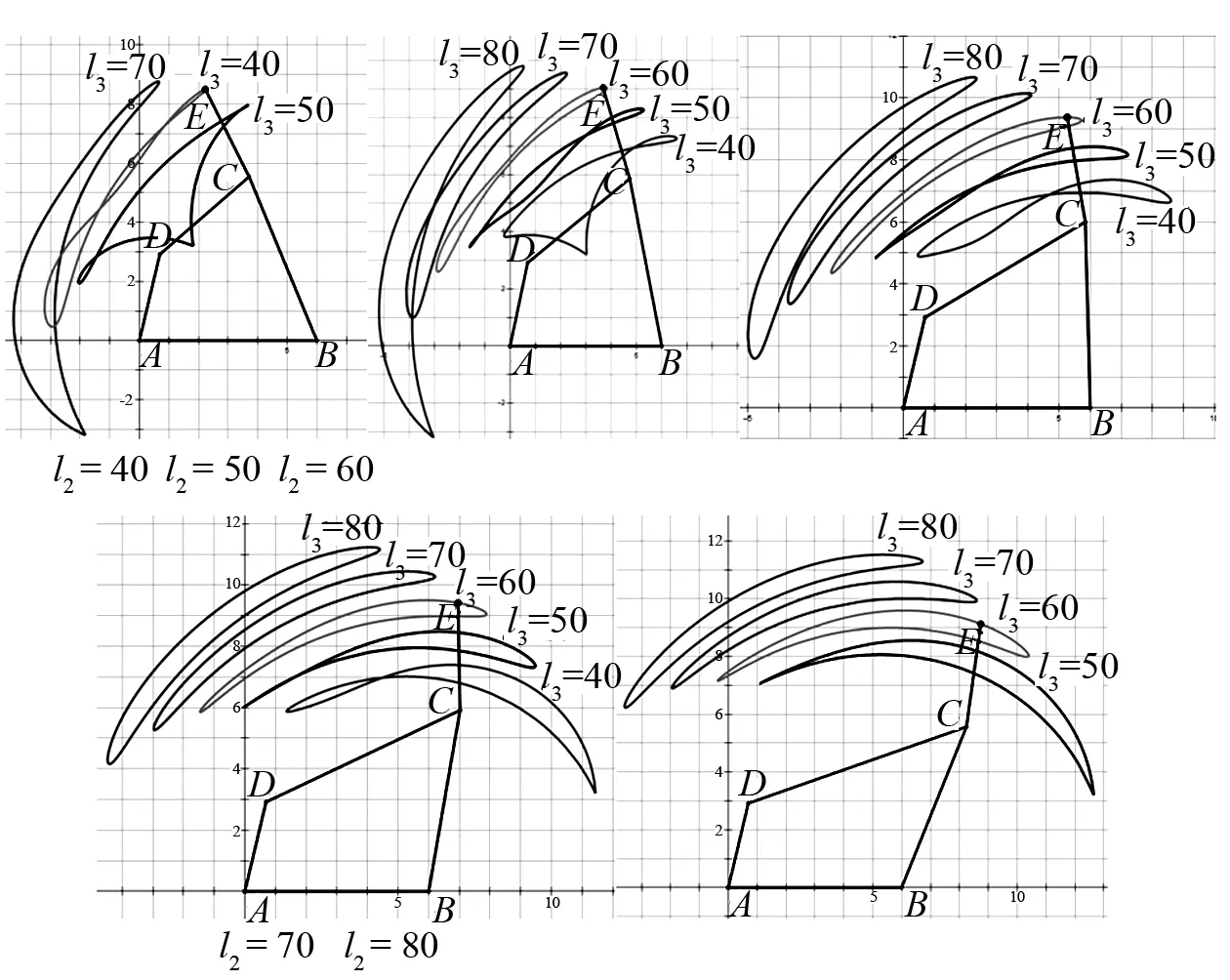
图5 连杆轨迹曲线正交模拟分析
由旋转器的转速为3 r/min即是象虫从底部到顶部用时为20 s。象虫运动速度为40 cm/min,则可得扩散器的内壁轮廓长度约为13 cm。通过分析,选定l1=30,l2=70,l3=70,l4=60满足要求。
3 连杆及扩散器建模及3D打印制造
按照设计尺寸对连杆及扩散器进行模型建立,模型建立考虑尺寸,连接处的刚度、强度,以及扩散器的轮廓外型曲线,并运用SolidWorks motion分析其速度与位移规律[8],发现均满足实验要求,然后将模型保存为stl面片格式,运用Materialise Magics 21.0对其进行支撑添加及3D打印的参数调整后导入3D打印机进行实物制造,在光固化和FDM打印机中打印出实体模型[9],SLA打印的零件经无水乙醇清洗处理,去支撑处理及砂纸打磨处理即可得到所需零件。在曲柄处和扩散器底部安装马达(附有减速装置),为连杆和扩散器的转动提供动力。然后进行组装调试。曲柄及扩散器模型及打印实物如图6、7。
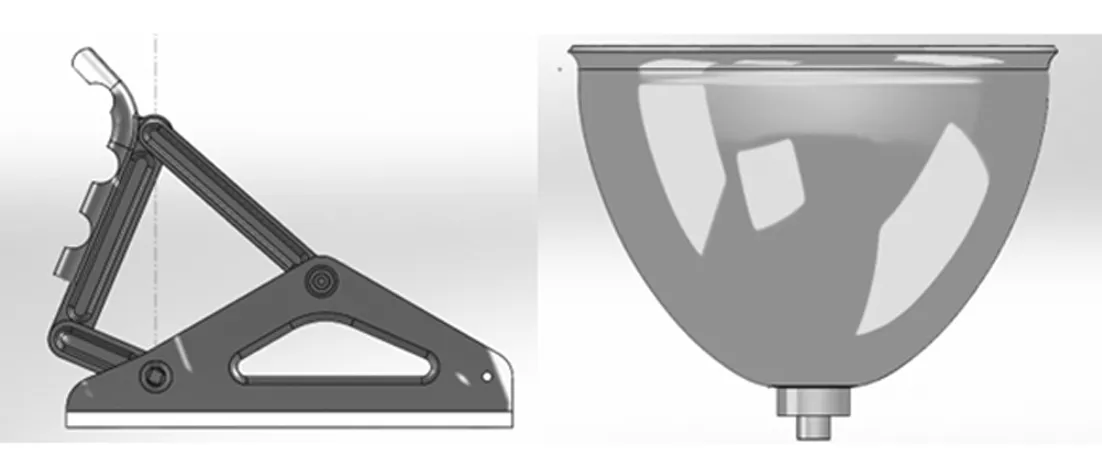
图6 三维模型图
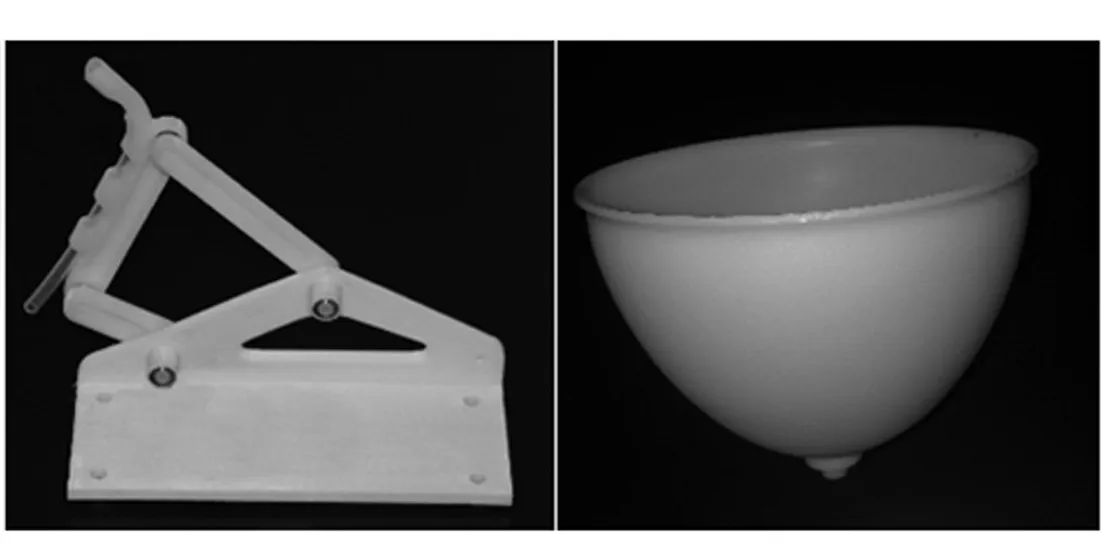
图7 3D打印实物图
4 结 论
通过连杆曲线的约束,MATLAB可行域计算,轨迹仿真选择,三维模型构建及3D打印制造一系列的手段,设计了象虫计数器的机械抓取装置,将新设计的曲柄连杆机构和扩散器上部组装,并将吸头放入固定位置。在管道处安装了光纤计数器,实现了象虫的自动计数。此研究为象虫计数的研制提供了一种切实可行的方法,与传统计数相比,具有以下优势。
(1) 选择了合理的四杆机构及扩散器曲面,消除了象虫堆叠误差。
(2) 运用光纤电子计数器代替了人工计数,提高了原有计数方式的准确率。
(3) 将计数抓取机构与象虫的习性相结合,实现了象虫的自动抓取功能,提高了统计效率。
