壁面机器人吸附机构吸附力的仿真与试验*
2020-03-04
南京工业大学 机械与动力工程学院 南京 211800
1 研究背景
近年来,各地高楼拔地而起,成为城市化进程的标志。与此同时,高层建筑物壁面的装饰、清洗等也成为改善城市面貌的重要工作。目前,大部分高楼壁面作业都由人工来完成,工作强度大,安全性低。国内外已有专家研究出用于高层建筑物外表面清洗等工作的壁面工作机器人,给壁面作业带来了极大方便。
对于壁面机器人吸附问题,目前已有磁吸附、真空吸附、推力吸附等吸附方式发展成熟,适合应用于不同场合。吴善强等[1]基于磁吸附方式设计了应用于金属壁面上的机器人,机器人能够实现直角壁面的转换,发挥了磁吸附方式下吸附力切换方便、机器人移动灵活的特点。张联盟等[2]研究了采用吸盘吸附的壁面机器人吸附模块姿态的控制,实现了吸附模块与墙面相对姿态的自主检测,满足自主攀爬的使用需求。腾迪[3]选用离心叶轮加密封腔的负压吸附方式设计了爬壁机器人的吸附机构,通过试验分别分析了空气流量、密封腔材质、密封机构安装高度对吸附力的影响。
笔者研究了推力吸附方式下影响吸附力大小的因素,应用计算流体动力学软件进行仿真,首先验证仿真方法的正确性,然后采用三因素三水平正交试验方法,确认影响吸附装置推力大小的最显著因素,提出最佳试验组合,提高吸附机构的效率。
2 壁面机器人的设计
壁面机器人的主要功能包括作业、吸附、移动等。壁面机器人作业机构贴近壁面,实现作业功能。壁面机器人通过建筑物顶部的提升电机加线缆的方式,实现移动功能。吸附装置用于推动壁面机器人吸附在墙面上,以便于工作[4-5],是壁面机器人的核心装置。吸附装置采用螺旋桨旋转产生的气流,使壁面机器人本体吸附在壁面上。这种吸附装置对壁面要求比较低,不存在泄漏问题,所以适用于大部分壁面机器人。笔者选用在壁面机器人框架外侧的四个角对称安装螺旋桨的吸附装置,螺旋桨对称安装能较好地控制壁面机器人工作和移动时的稳定姿态[6]。由于壁面机器人移动机构含有线缆,将螺旋桨暴露在外部有可能产生安全问题,因此设计安装螺旋桨保护外壳,一方面可以提高吸附机构的安全性,另一方面对螺旋桨的噪声也可以起到抑制作用。
3 软件仿真
在仿真计算过程中,控制方程采用雷诺时均纳维-斯托克斯方程,湍流模型采用剪切压力传输k-ω模型[7]。将计算域分为两部分,一部分为包含螺旋桨的旋转域,另一部分为外部的静止域[8]。采用四面体非结构网格进行网格划分,对旋转域、旋转域与静止域的交界面、螺旋桨壁面进行网格加密。入口边界条件选择速度入口,入口速度为零,出口边界条件选择压力出口,壁面边界条件为无滑移的光滑壁面。
笔者选用文献[9]研究的一款用于无人机的多旋翼螺旋桨来验证计算流体动力学软件仿真方法的正确性。通过试验获得螺旋桨在不同转速下的拉力,同时应用逆向建模的方法获取螺旋桨的基准翼型、弦长分布、安装角分布等结构参数。基于三维参数,应用CATIA软件进行三维建模,螺旋桨三维模型如图1所示。螺旋桨建模完成后,进行仿真,推力仿真结果与试验结果对比如图2所示。由图2可知,螺旋桨推力仿真结果稍小于试验结果,这是由于仿真环境与现实环境存在差异。推力误差小于5%,仿真结果较好,验证了计算流体动力学软件仿真方法的正确性。
▲图1 螺旋桨三维模型
4 正交试验
螺旋桨保护外壳提高了壁面机器人的安全性,但是保护外壳同时改变了空气流域,对螺旋桨的推力产生影响[10]。对于壁面机器人吸附装置的最佳工作方式,需要考虑螺旋桨保护外壳的结构参数、安装等因素的影响。笔者在试验获取螺旋桨参数的基础上,将螺旋桨直径改为431.8 mm,将基准翼型改为更适合悬停状态的Clark Y翼型[11],其余参数与上述试验螺旋桨参数相同。螺旋桨保护外壳为壁厚5 mm的竖直圆形通道,内径为440 mm。吸附机构如图3所示。
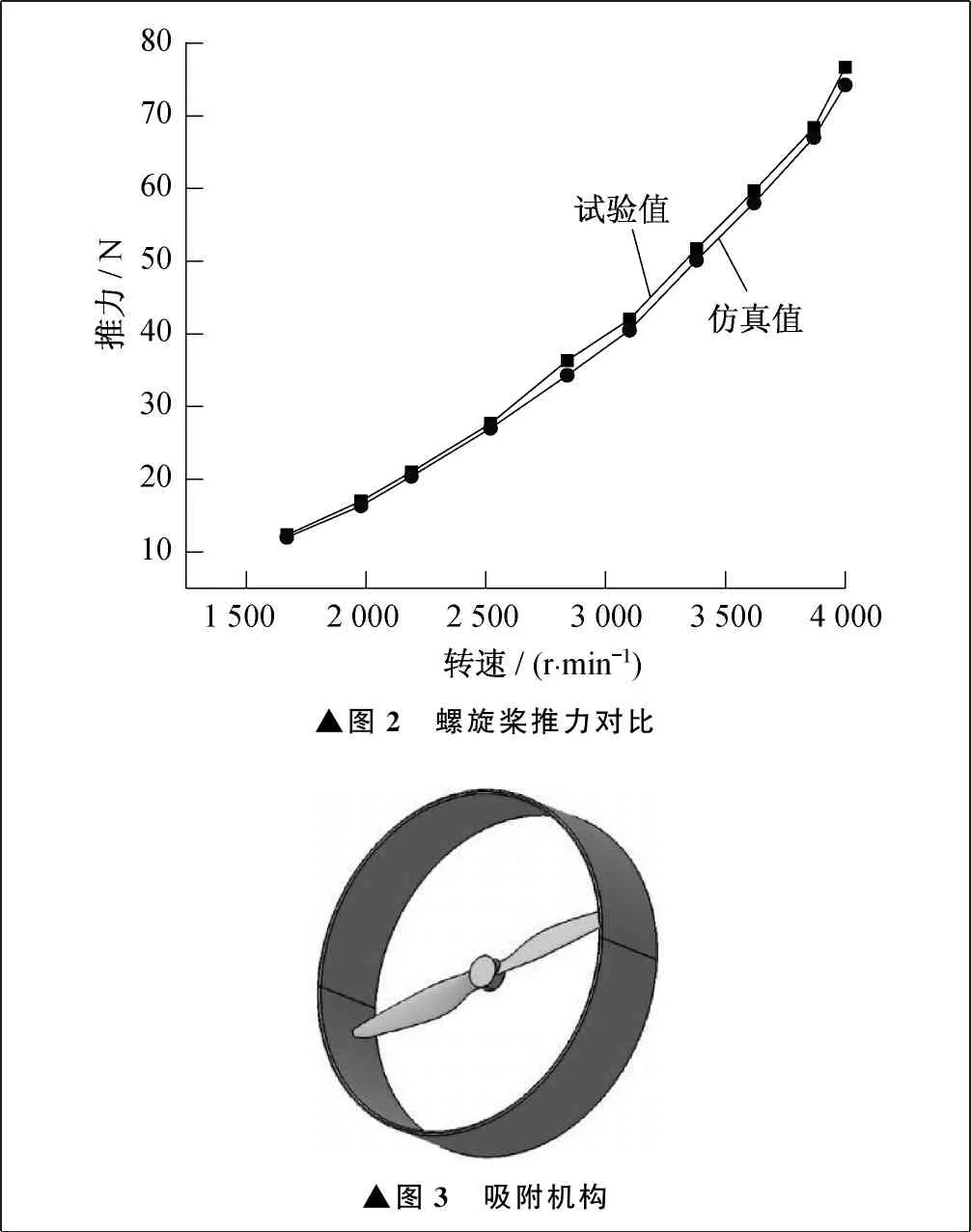
▲图2 螺旋桨推力对比▲图3 吸附机构
为了进一步分析多变量多水平对吸附力的影响,考虑壁面机器人的结构参数和工作状态,笔者应用正交试验方法进行研究[12]。螺旋桨保护外壳与壁面间隙记为A,螺旋桨保护外壳宽度记为B,螺旋桨转速记为C。其中,A因素选取110 mm、130 mm、150 mm,B因素选取120 mm、140 mm、160 mm,C因素选取4 000 r/min、4 500 r/min、5 000 r/min。优化因素如图4所示,选择L9(34)正交试验表安排试验组合,试验方案及结果见表1[13]。
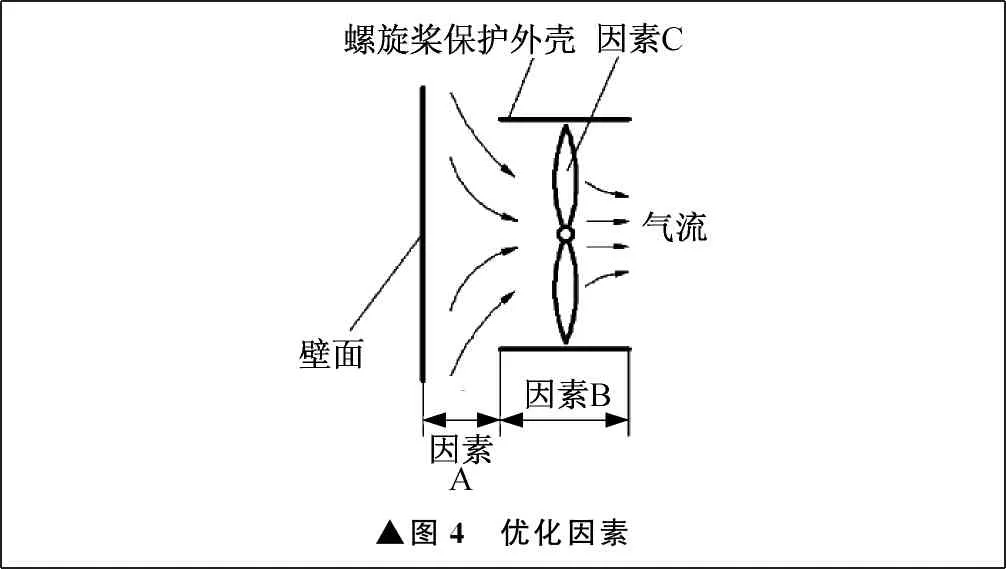
▲图4 优化因素
计算流体动力学软件仿真过程中,在螺旋桨保护外壳内部设置旋转域,螺旋桨保护外壳被包含在静止域中。采用布尔运算,将螺旋桨保护外壳表面设置为无滑移的壁面,在吸附装置入口前部根据试验安排设置壁面。仿真结果速度矢量如图5所示。
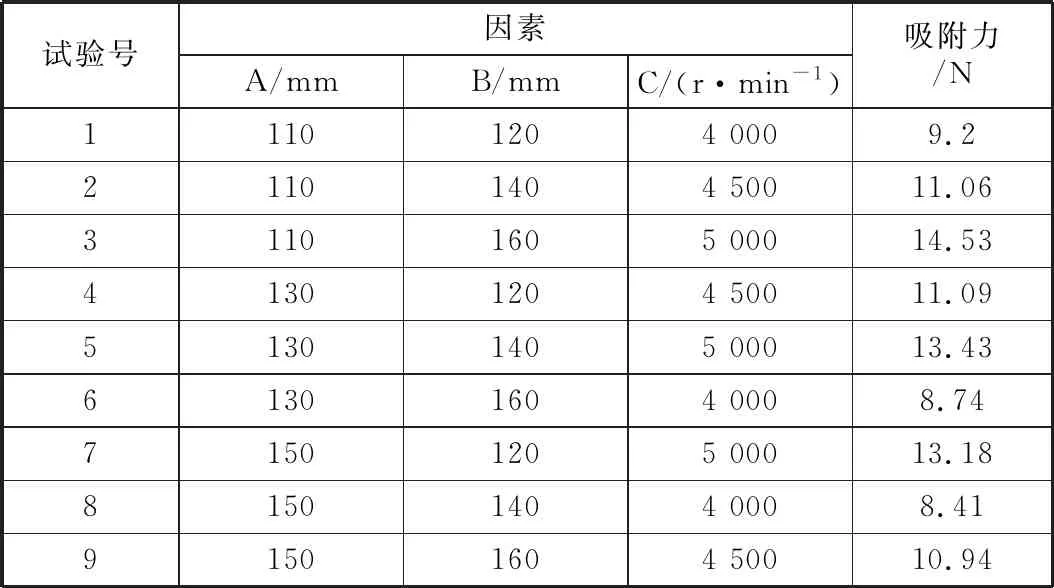
表1 试验方案及结果
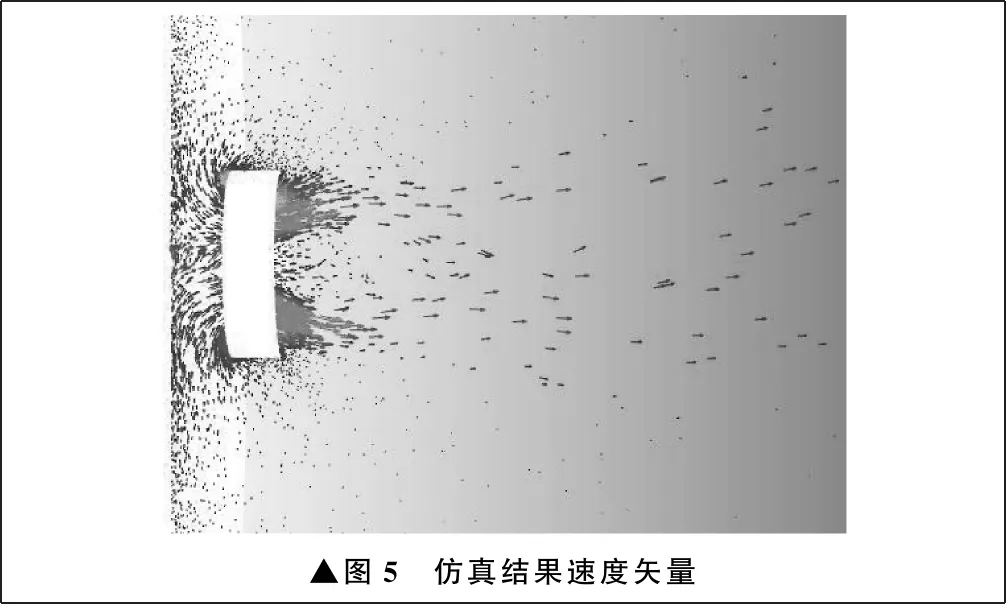
▲图5 仿真结果速度矢量
根据试验结果,采用极差分析法对三种因素影响的主次顺序和趋势进行分析[14]。吸附力极差分析结果见表2,其中ki值为对应因素水平的吸附力试验结果平均值,R为极差值。
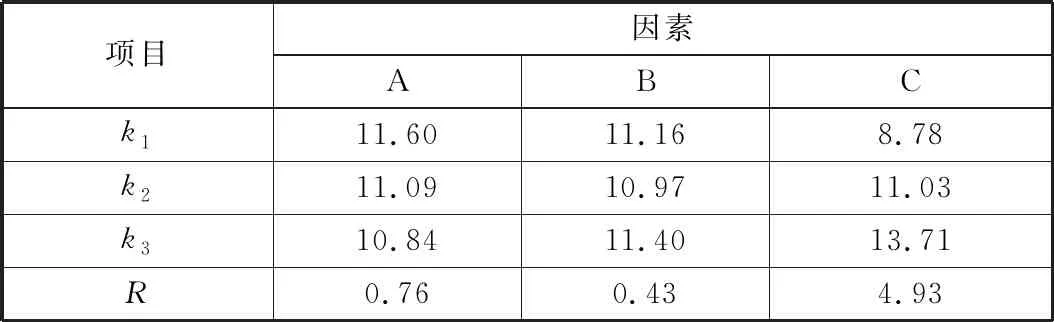
表2 吸附力极差分析 N
由表2可知,影响吸附力大小的各个因素主次顺序为螺旋桨转速、螺旋桨保护外壳与壁面距离、螺旋桨保护外壳宽度。螺旋桨保护外壳与壁面间隙增大,吸附力减小。仿真结果可知,当与壁面距离较小时,螺旋桨保护外壳上产生垂直于壁面的负压吸附力,且距离越小,负压吸附力越大,从而使吸附机构产生更大的吸附力。随着螺旋桨转速加快,吸附力呈直线增大,表明螺旋桨转速对吸附力的影响最大。在实际应用中,通过改变螺旋桨转速调节吸附力是最便捷有效的方法。螺旋桨保护外壳宽度增大,吸附力呈浅V形变化,吸附力增大效果不明显。考虑螺旋桨保护外壳宽度增大会增大机器人整体的质量,当宽度对吸附力的影响较小时,应尽量减小螺旋桨保护外壳的宽度。基于以上分析,最佳参数组合为螺旋桨保护外壳与壁面距离110 mm、螺旋桨保护外壳宽度120 mm、螺旋桨转速5 000 r/min。
5 结束语
笔者研究了螺旋桨保护外壳对壁面机器人吸附机构推力的影响,采用计算流体动力学软件对某款多旋翼螺旋桨进行仿真分析,仿真结果与试验结果拟合良好,验证了计算流体动力学软件仿真方法的正确性。通过正交试验,分析螺旋桨保护外壳与壁面距离、螺旋桨保护外壳宽度、螺旋桨转速对壁面机器人吸附机构吸附力的影响。通过试验结果极差分析,确认试验因素的重要性次序。兼顾效率和吸附力,得到最佳参数组合,具有参考价值。