不同站间高差的北斗中长基线解算精度对比分析研究
2020-02-22张婷
张婷


摘 要:本文对北斗中长基线静态基线解算的算法模型进行了介绍,基于北斗双频观测数据,对站间小高差和站间大高差中长基线的解算精度进行了测试和分析。实测结果表明:站间小高差基线各时段解算精度均优于平面1cm+1ppm,高程2cm+2ppm;站间大高差基线绝大部分时段解算精度均优于平面1cm+1ppm,高程2cm+2ppm,在解算时段长度为4h,解算精度优于平面1cm+1ppm,高程2cm+2ppm的时段比例高于95%。
关键词:北斗 中长基线 静态基线解算 站间高差 时段长度
中图分类号:P228.4 文献标识码:A 文章编号:1674-098X(2020)09(b)-0046-03
Abstract: This paper introduces the algorithm model of static baseline solution for Beidou medium and long baselines, based on the double frequency observation data of Beidou, tests and analyzes the solution accuracy of small height difference between stations and large height difference between stations. The actual measurement results show that the solution accuracy of small height difference baseline between stations is better than that of plane 1cm + 1ppm and elevation 2cm + 2ppm in all periods; the solution accuracy of large height difference baseline between stations is better than that of plane 1cm + 1ppm and elevation 2cm + 2ppm in most periods, and the solution accuracy is better than that of plane 1cm + 1ppm and the proportion of elevation 2cm + 2ppm is higher than 95% when the length of solution period is 4 hours.
Key Words: Beidou; Medium and long baseline; Static baseline solution; Height difference between stations; Period length
静态基线解算在大地控制網布设和控制点加密中具有重要应用,主流的GNSS数据处理软件有Trimble的TBC、Leica的LGO、Novatel的WayPoint、中海达的HGO等。虽然北斗静态基线解算原理与GPS类似,但由于北斗星座设计的特点,站星几何图形变化较慢,载波相位观测量间具有很强的相关性,造成法方程严重病态[1-2],北斗系统在基线解算的理论研究和应用方面正在展开,相关的实验分析还需要进行大量的工作[3]。
对于中长基线而言,电离层、对流层等误差的空间相关性减弱,导致双差残余的电离层、对流层等误差较大,以致影响浮点模糊度的精度,增大模糊度固定难度[4]。为了得到正确的模糊度整数值,中长基线情况下需要考虑电离层延迟误差和对流层延迟误差的影响。通常,电离层延迟采用双频消电离层组合进行消除,对流层延迟通过干延迟改正和湿延迟参数估计的综合处理进行消除。其中,对流层延迟与站间高差关系密切,一般而言,站间高差越大,对流层延迟的影响越显著。
本文着重对北斗中长基线静态解算中的算法模型进行阐述,对站间大高差和小高差解算结果进行分析,文中所有数据均采用自研的北斗静态基线解算软件进行数据处理。
1 中长基线静态解算的算法实现
静态基线解算通过对载波进行双差组合(首先在站r和站b间进行单差,再基于卫星间进行双差),此时接收机钟差已消除,则其双差观测方程为:
其中:和分别为双差载波(测相伪距,单位为m)和码组合观测量,为伪距观测量的双差值,为相应频点的波长,为双差模糊度,为电离层延迟误差,为对流层延迟误差,和分别为载波和码残余误差(观测噪声和未模型化误差)。
在进行解算时,对流层延迟通过干延迟GPT/GMF[5]改正和湿延迟参数估计进行消除,电离层延迟采用双频消电离层组合进行消除。中长基线静态解算主要基于上述公式,具体做法为:基于长时间观测数据,首先使用宽巷载波双差数据列立观测方程,求解出宽巷模糊度,然后将宽巷模糊度代入消电离层组合观测方程中,估计模糊度浮点解和坐标(隐含在中),然后通过搜索方法对模糊度浮点解进行取整,最后将模糊度整数解代入到上述方程中,得到精确的基线坐标。
2 基线精度测试
为了获得较全面的基线精度统计结果,分别选取不同长度、不同站间高差基线进行测试,数据情况及测试结果如下所述。
2.1 站间小高差基线测试结果
中长基线站间小高差测试以2017年1月华北地区某次测试为例,基线长为41.4km,站间高差为37m。A、B、C三种型号B1、B2双频接收机均进行了48h测试,解算模式为双频消电离层模式,高度角为15。,4h为一个时段,模糊度搜索方法为Lambda方法,Ratio阈值为2.5,对流层处理方式为对流层干延迟改正、湿延迟估计。以LGO软件长时间观测、分时段解算的GPS基线结果为真值,平面精度统计结果如图1所示,高程精度统计结果如图2所示。其中,1~12时段为A型接收机测试结果,13~24时段为B型接收机测试结果,25~36时段为C型接收机测试结果。
从图1和图2可看出:解算的各时段平面精度均优于1cm+1ppm,高程精度优于2cm+2ppm;平面精度总体优于高程精度;3种型号接收机解算结果存在一定的差异,尤其表现在平面精度。此种现象的存在,可能与接收机内部噪声水平和稳定性相关。
2.2 站间大高差基线测试结果
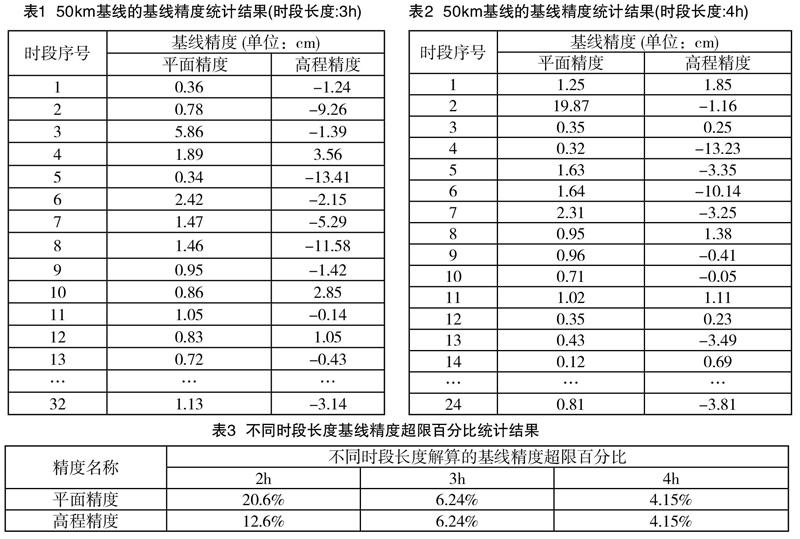
为对大高差数据进行测试,从香港CORS站下载HKWS、HKNP两站2018年8月26日、2018年11月25日、2019年2月24日、2019年6月1日共4d96h测试数据分别进行解算。HKWS、HKNP两站基线长为49.89km,站间高差为286.88m。解算频点为北斗B1、B2双频、电离层为双频消电离层模式,高度角为15。,采样间隔为30s,模糊度搜索方法为Lambda方法,Ratio阈值为2.5,分别以2h、3h、4h为一个时段进行处理。以香港地政总署网站给出的2019年4月1日CORS站坐标为真值进行精度评估,时段长度为3h的基线精度统计结果如表1所示,时段长度为4h的基线精度统计结果如表2所示,表3为不同时段长度基线精度超限百分比统计结果。
为便于对精度结果进行对比统计,平面精度以1cm+1ppm、高程精度以2cm+2ppm为限值,对于HKWS、HKNP两站近50km基线,平面精度限值为6cm,高程精度限值为12cm。表1、表2中以黑色加粗字体标识的即为平面精度超过6cm、高程精度超过12cm的精度数据。表3为以此限值为基准的平面精度和高程精度超限百分比统计结果。
從表1、表2可看出:除少数超限时段外,其它解算时段的平面精度均优于1cm+1ppm,高程精度优于2cm+2ppm;平面精度总体优于高程精度。从表3可看出:随时间增加,平面精度和高程精度超限百分比逐渐下降,在时段长度为4h时,平面精度和高程精度达标百分比均高于95%。
3 结语
本文对北斗中长基线静态解算的算法模型进行了介绍,对不同长度、不同站间高差的基线进行了测试和分析。结果表明:站间小高差基线各时段解算精度均优于平面1cm+1ppm,高程2cm+2ppm。站间大高差基线在时段长度为4h时,平面精度优于1cm+1ppm,高程精度优于2cm+2ppm的比例高于95%。
参考文献
[1] 高扬骏.北斗中长基线三频模糊度解算的自适应抗差滤波算法[J].测绘学报,2019(3):295-302.
[2] 黎刚平.基线约束辅助的北斗测姿算法研究与DSP实现[D].重庆:重庆邮电大学,2017.
[3] 武文俊.基于北斗三号的长基线共视时间比对[J].宇航计测技术,2020(3):33-37.
[4] 汤逸豪.北斗高精度基线解算实验研究[D].成都:西南交通大学,2017.
[5] 金俭俭.基于北斗三频约束的中长基线解算研究[J].测绘工程,2018(4):28-32.
[6] 陈学锦.不同时长北斗基线精度差异分析[J].北京测绘,2019(10):1245-1249.
