基于云计算的喷涂机器人远程监控诊断系统的研究*
2019-12-26高伟强刘建群
潘 力,高伟强,刘建群,张 淦
(广东工业大学 机电工程学院,广州 510006)
0 引言
随着装备功能日趋复杂,装备的故障诊断和健康管理问题日显突出。喷涂机器人是现代涂装行业的核心设备,维护机器人的健康状况,保障喷涂生产线的顺畅运行是涂装企业的基本需求。由于喷涂机器人的系统复杂性,涂装企业难以独立开展机器人的故障预测和健康管理工作,需要设备供应商到现场分析排障并维修,维护成本高,维护效率低。
对于传统的工业机器人远程监控系统,企业需要搭建自身的服务器,设备服务商无法专注于设备研发以及设计,同时在服务器维护以及架构设计单一,无法进行扩展,不能满足涂装设备使用商对特殊远程监控系统的特殊要求[1]。
云计算打破了计算和数据资源的物理边界,信息资源可以在网络间动态迁移。云计算已被应用于医疗诊断[2]、电器和机电设备远程诊断[3-4]技术中,取得了较好成效。
本文尝试基于云计算平台建立一种喷涂机器人远程监控诊断系统,该系统提供数据共享、状态监测云、信息存储与分析云服务等服务。同时,在云计算平台中建立不同的远程监控系统子服务,使用通用通信协议,子服务能够根据不同企业的需求进行配置使用。从而满足了不同涂装企业对喷涂机器人的故障诊断不同需求,方便企业更好更及时维护喷涂机器人等设备。
1 喷涂机器人远程服务系统架构
根据对佛山市多家粉末静电喷涂企业的调查,以及对文献的总结归纳,本文提出了喷涂企业对喷涂机器人远程监控诊断系统需具备下列功能:
(1)监控诊断,能实现对喷涂机器人生产运行的远程监控和管理,为设备安全运行提供可靠技术保障;
(2)大数据,能实现喷涂企业机器人故障诊断数据和诊断模型的信息共享,弥补单一企业或单台设备的机器人运行状态数据和诊断模型数据量的不足;
(3)存储和浏览服务,能够为用户提供生产和工艺信息的数据存储、数据管理和数据应用服务;
(4)维护保障,可对机器人远程维护,实现远程软件升级,参数设置、优化与调整,设备管理。
针对上述对喷涂机器人远程监控诊断系统的需求,本文建立了喷涂机器人远程监控诊断系统的云计算架构。
1.1 喷涂机器人远程诊断云系统架构
本文根据云制造中面向云服务的信息物理系统(CSOCPS)的技术搭建机器人远程监控和健康管理云构架,该结构主要由三层组成:软件即服务(SaaS)、平台即服务(PaaP)及基础设施即服务(IaaS)[6]。如图1所示。

图1 喷涂机器人远程监控诊断系统架构
(1)软件即服务(SaaS)主要通过http及WebSocket协议获取云服务各种数据,为用户提供云端处理以及设备信息终端浏览服务功能。
(2)平台即服务(PaaP)是云计算平台,主要提供虚拟计算、虚拟存储等云服务。而云计算平台由专业云服务商利用集群服务器组成。因此,云平台的计算、存储原则是无限大的,只需向云平台服务商支付需求的服务费用即可。根据企业业务,利用VPC专有网络技术隔离各企业的公共云资源,形成各企业个性化的喷涂机器人远程监控、管理系统。在虚拟计算服务中提供各种服务的接口,针对不同企业的监控诊断系统需求,调用不同的服务接口,也可与企业合作定制服务。若该定制服务具有市场价值,可将该服务提升到虚拟计算,制作相关接口,从而扩充虚拟云计算服务,提供给其他企业使用。
(3)基础设施即服务(IaaS)主要由生产现场设备层的软硬件系统组成,包括喷涂机器人、PLC和传感器信号采集设备等。机器人、PLC设备等通过局域网和工业现场总线交互信息。
1.2 喷装企业云服务平台和大数据共享
基于上述喷涂机器人远程诊断云系统架构,涂装企业与设备服务商之间可建立起图2所示的云计算服务平台。图中包括一个提供云计算服务的云端,以及涂装车间、涂装企业生产管理和设备服务商3个客户端。在该平台上,云服务为客户端提供数据存储、分析、计算等云服务,并可以根据需求和开放性为设备服务商、涂装企业内部、以及各涂装企业之间提供数据和模型共享。

图2 喷涂机器人云功能图
(1)故障数据和故障模型共享。经大数据训练后的故障模型分发给连接到云平台中的各涂装企业共享,可有效提高涂装企业对设备健康状况的分析和管理能力。
(2)算法处理共享。利用云平台的并行性和分布计算技术高效数据处理能力,将采样数据处理算法、故障诊断分析算法、喷涂优化算法、生产排产调度算法等计算服务共享,为涂装企业提供云计算服务。
(3)喷涂模型共享。喷涂机器人在每次示教后都会生成相应的喷涂模型,该模型包括喷涂的轨迹、涂料及辅料类型、喷涂工艺参数、喷件的规格型号等喷涂信息,并上传到云端存储供企业内部各机器人共享。
2 基于云计算的故障诊断服务
故障诊断服务是云端数据处理的核心服务,能够为企业提供云端设备健康状况预警、故障快速定位、故障分类等服务。大量研究[2,7-9]表明可以通过测试、分析机械系统的振动信号特征对机械系统进行故障诊断和定位,并可以通过对振动信号的持续跟踪实现对机械系统的故障预测和健康管理。为获得机器人机械结构的健康状况,可以在喷涂机器人机械本体主要部件设置检测节点安装加速度传感器,通过定时采样将机器人机械振动信号数据发送到云端,利用云计算服务进行机械故障预测、分析和诊断。本文将隐马尔科夫模型(HMM)和神经网络(BP)算法相结合[10-11]开发了机械故障诊断云计算检测程序,该程序可以对采样上传到云端的振动信号数据进行分析处理,包括对原始数据的特征提取、参数训练、故障模板匹配。图3所示是故障诊断云计算数据分析过程。

图3 云计算数据分析过程
2.1.1 特征提取
要通过对振动信号的分析实现故障的诊断,首先需要在大量的振动测试数据中提取故障特征。采样振动信号数据通过经验模态分解(EMD)计算出本征模函数(IMF),在利用公式(1)对IMF进行计算,获取IMF的能量矩[12]。
(1)
式中,Δt表示采样周期,n表示总的采样点,ci表示本征模函数IMF。
用计算得到的E1、E2...,En构造特征向量T=[E1,E2,…,En],并对特征向量T进行归一化处理:
(2)
2.1.2 HMM状态识别模型
根据隐马尔科夫模型,本文设置隐藏状态N分别为:健康、间歇故障以及故障状态。本文的HMM状态由参数λ=(N,M,A,B,π)来描述。其中A使用左右型的状态转移矩阵;观察序列M使用4组的IMF能量矩;π为模型初始值;观察概率矩阵B采用经验方法确定,通过HMM中Baum-Welch算法获得模型的参数λ[13]。这样,HMM隐藏状态的健康、间歇故障以及故障状态对应的HMM模型参数为λ健康、λ间接故障和λ故障。
2.1.3 特征匹配与神经网络训练

(3)

ΔT作为神经元网络(BP)的训练输入量,对诊断模型进行训练,可以获得为值域[0,1]的输出量,作为权重值用来匹配各种故障状态参数。当输出值当接近0时,表示与某故障状态非常匹配;当输出值接近1时表示不匹配。本文采用的BP设置为三层,使用双曲线函数tanh作为训练函数。
2.2 基于云计算故障诊断实现步骤
本文研究的故障诊断过程属于非实时诊断,需要在一定时间内对安装在喷涂机器人本体机械结构中的加速度传感器信号定时巡采,将采集的数据保存为文件后上传到云端进行分析、处理和诊断。故障诊断主要分为4步:参数初始化、故障初次匹配、故障匹配以及学习过程。如图4所示。

图4 基于云计算故障诊断实现流程

(2)初次故障匹配、诊断。在初次发现新故障类型时,需要专业技术人员到故障现场完成故障人工诊断定位,确定故障类型。同时将采集到一系列的故障状态下的振动原始数据上传到云端,经计算后可获得HMM模型中的λ间接故障和λ故障参数。将所获得的λ间接故障和λ故障参数保存到云端的故障模型库,便于以后故障匹配过程中调用。
(3)故障匹配。将现场采样的数据在云服务经HMM状态识别,筛选出健康和故障两种状态。若为故障状态,就通过故障模型库对各故障状态进行匹配。若与故障模型库的所有故障类型都不匹配,将保存为新的故障模板,这时需要服务商派遣专业人员进行现场排查、诊断、定义故障。
(4)训练和学习过程。在某故障诊断结束后,将当前判别的故障特例数据作为输入量训练故障模型,通过这样的多次反复迭代训练可使故障模型库和模型参数不断进化完善。
3 实验方案及验证
为检验上述云计算故障诊断方案,本文在实验室搭建设备端和客户端实验平台,通过某商业云服务器建立云端,对基于云计算的喷涂机器人远程监控诊断系统软硬件架构和算法开展实验验证。如图5所示。

图5 试验平台搭建架构
实验在3个实验室分别用3台减速机模拟机器人的传动系统开展实验。减速机运行的振动信号通过加速度传感器-动态信号采集仪采样后,数据通过无线终端设备DTU传入云端。为模拟机器人的故障信号,本实验将其中的两台减速机进行人为的齿轮磨损和轴承磨损处理,分别模拟齿轮故障和轴承故障,与另一台正常减速机的信号特征进行对比,形成齿轮磨损状态、轴承磨损状态和健康状态特征库。
为每项服务分配不同的端口,利用socket进行连接通信,当使用到服务时进行调用即可。实验中使用到Web服务、公共服务、数据处理服务以及MySQL。网页服务使用go语言编写,数据处理服务器使用python语言编写,数据库为MySQL。设备层主要由加速度传感器-数据采集仪、减速机以及无线终端设备DTU组成,动态数据采集器设置采样频率为2kHz。
实验对系统进行参数初始化,设置匹配阈值是[0.8,0.8,0.8,0.8],采集100组数据,每组采集10000个数据点,经过EMD算法后获得每组共100个特征向量,求出每组类型的模板。如表1所示。
正常状态、齿轮磨损、轴承磨损状态下的减速机的状态匹配结果如表2所示。
图6、图7、图8所示为轴承磨损减速机前10组匹配阈值直方图结果。图6、图7可知,10组数据与健康模板、齿轮故障模板匹配均值均超过0.8,接近[0, 1]值域的1值,表明该减速机状态既不属于健康状态,也不只属于齿轮磨损状态。由图8可知,其匹配阈值与轴承磨损模板匹配的阈值均低于0.1,表示正确匹配出故障类型。
图9所示为具有轴承磨损状态减速机的对数似然概率均值训练变化过程。本文开发的故障诊断模型可以将已识别故障的数据作为输入参数训练优化HMM模型参数。图中在第一组特征向量经过HMM模型处理后,故障状态的对数似然概率值为-50,故障特征与健康状态的区别不明显。第二组数据输入计算训练后故障状态的对数似然概率值接近50,从而大大增加HMM模型识别准确率。通过若干组数据训练故障状态的对数似然概率值稳定在40左右,使故障诊断模型得到进化。图10所示为本文开发的喷涂机器人远程监控诊断系统数据轴承磨损数据处理结果显示界面。

表1 各状态的模板特征库

表2 各状态的匹配成功率
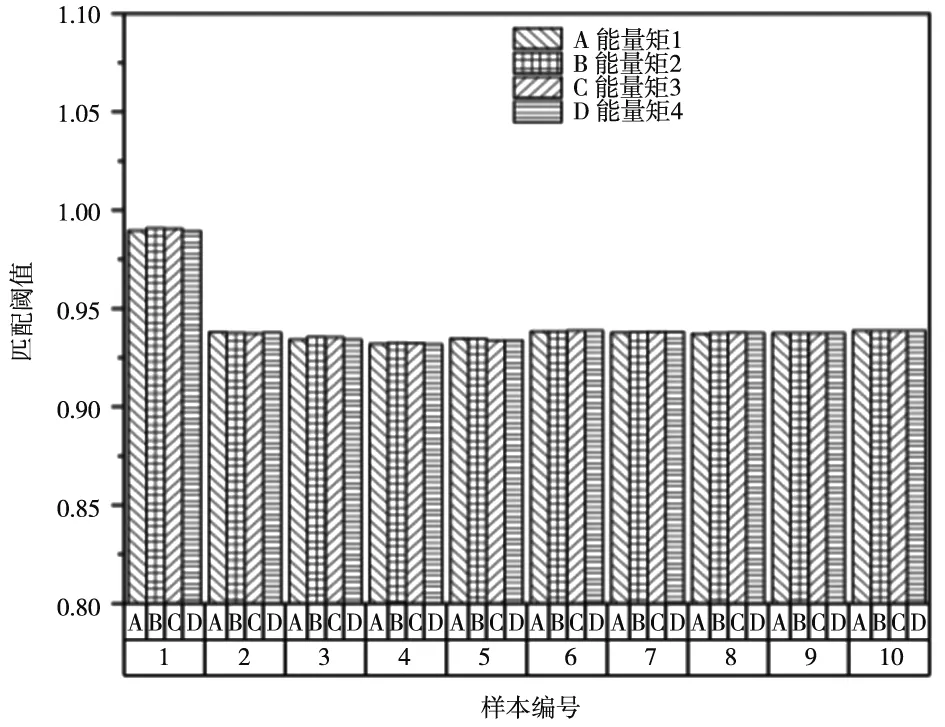
图6 轴承磨损状态下减速机的特征向量与特征库的健康特征向量差值匹配阈值的均值

图7 轴承磨损状态下减速机的特征向量与特征库的齿轮磨损特征向量差值匹配阈值的均值
图8 轴承磨损下减速机的特征向量与特征库轴承磨损特征向量差值匹配阈值的均值

图9 轴承磨损下减速机的各样本的对数似然概率均值

图10 喷涂机器人远程数据处理结果
4 结束语
在“互联网+”的背景下,将云计算技术运用于机器人的远程监控和故障诊断是解决目前设备服务商有限的技术服务或维护保障有限资源与满足用户设备健康状况维护需求的矛盾的有效途径。本文提出了一种基于云服务的喷涂机器人远程故障监控系统构架,基于这一系统建立起设备服务商与涂装企业之间服务、维护桥梁,提供数据、模型、计算的共享,使得孤立的喷涂机器人可以数据信息互联互通。同时利用该平台对机器人实现生产信息远程监控和故障诊断。
本文将隐马尔科夫模型HMM和神经元网络BP相结合,研究了机械故障诊断算法,开发了基于云计算的远程机械故障诊断程序,并通过减速机故障诊断实验对云计算远程故障诊断系统的有效性进行了实验验证,实验表明基于云计算的机器人远程监控和故障方案可行。