面向场景的城市PM2.5浓度空间分布精细模拟
2019-11-28胡晨霞
许 珊,邹 滨,胡晨霞
面向场景的城市PM2.5浓度空间分布精细模拟
许 珊,邹 滨*,胡晨霞
(中南大学地球科学与信息物理学院,湖南 长沙 410083)
针对传统PM2.5浓度空间分布模拟方法忽略了城市内部如道路、工厂、居民区、景区等不同微环境整体对PM2.5浓度影响机制的缺陷,本研究提出一种微环境PM2.5浓度场景分异的理论假设,并以湖南长沙主城区为例,结合基于污染先验知识划分的城市微环境场景空间分布与自主设计加密观测场获取的203个监测点小时PM2.5浓度加密数据,分析城市微环境PM2.5浓度场景时空分异特征.在此基础上,耦合地理加权回归 (GWR) 与人工神经网络 (ANN) 方法,构建微环境场景增强下的PM2.5浓度空间分布精细模拟GWR-ANN模型,开展城市内部高空间分辨率PM2.5污染制图.结果表明:不同微环境场景间PM2.5浓度存在显著时空差异,地表覆盖类型相同但分别位于2个不同场景的监测点间PM2.5浓度差会随时间发生变化;耦合微环境场景变量的GWR-ANN模型能够有效精细模拟PM2.5浓度的空间分布,模型拟合效果与交叉检验精度指标整体优于无场景变量参与的GWR-ANN模型(除部分时相较为接近外,检验R: 0.76~0.84vs. 0.57~0.81);场景增强下的PM2.5浓度空间分布100m级分辨率模拟估算结果可以较好揭示研究区PM2.5浓度高低值局地变化特征.
PM2.5;污染制图;场景假设;地理加权回归;人工神经网络
PM2.5会影响大气能见度,危害人体健康[1-3].中国作为超七成城市空气质量不达标的PM2.5污染“重灾区”[4-5],已经出台了一系列空气污染管控防治政策据.了解PM2.5浓度时空分布特征是合理制定及实行相关防控措施的必要前提与先决条件.实践证明,同样的污染治理政策在不同城市效果有所差异[6],而城市内部PM2.5浓度在不同的微环境场景(如居民小区、建筑工地、交通路口、校园、公园等)也存在差异[7-8],为推动精准“网格化”的防控治理决策,“因地制宜”地开展污染防控,需要掌握高分辨率、街区尺度、小时级的精细PM2.5分布.
目前,我国大气环境质量监测与评估主要依赖于地面固定监测点,但常规地面监测站点较为稀疏,且分布不均,仅能反映站点周围有限范围内污染状况,难以揭示没有监测站点区域的PM2.5浓度变化特征[9].空间插值、大气模式模拟、遥感估算、高级统计建模等PM2.5浓度的空间分布模拟技术在一定程度上弥补了这一缺陷,能够在宏观尺度上揭示PM2.5浓度的时空分异规律,为区域联防联控与治理决策提供科学支持[10-13].其中,高级统计建模耦合污染源排放与扩散的相关要素,通过建立PM2.5浓度与相关因子的经验统计模型估算未布设监测点区域PM2.5浓度值,其数据获取容易、建模方法灵活、适用性较广,已成为模拟揭示大气污染时空分异的常用手段[14].
按建模原理差异,现已报道的经验统计模型主要包括线性回归和非线性回归两类.线性回归模型的典型代表是土地利用回归(LUR)和地理加权回归 (GWR),相较于LUR假定全局系数一致,GWR考虑了空间关系的非平稳性特征,可以有效提高PM2.5浓度模拟精度[15-16].此后提出的时空地理加权回归[17]和结构时间自适应回归[18]等模型也都是以GWR为基础.而非线性回归中,传统方法有广义可加模型和贝叶斯最大熵估计等[19-20].随着人工智能技术的成熟发展,人工神经网络(ANN)和随机森林(RF)等智能机器学习模型因其擅长通过学习解决复杂问题,具有较强的泛化能力,逐渐成为研究的热点[21-22].其中,ANN具有较强的非线性拟合和并行分布处理能力,克服了传统机器学习模型在处理非结构化信息方面的缺陷,在PM2.5浓度模拟领域已经有广泛应用[21,23-24].但ANN模型收敛缓慢,受学习网络初始权值和阈值选择影响,较易陷入局部最优(过度拟合),因此,有研究尝试结合遗传算法(GA)全局寻优的特性优化ANN模型[25].
尽管国内外学者围绕PM2.5浓度精细模拟的研究已经取得了丰硕的研究成果,时空分辨率也由年月际、公里尺度逐步向日变化和百米尺度发展.但目前研究往往忽略了地表覆盖及其空间配置作为一个微环境场景整体对PM2.5浓度的影响机制,使得PM2.5浓度模拟难以突破分辨率与精度的同步提升.针对上述不足,本研究提出一种城市PM2.5浓度微环境场景理论假设,并以湖南长沙主城区为例,在基于先验知识获取微环境场景空间分布的基础上,通过布设加密观测点分析城市微环境PM2.5浓度场景时空分异特征,进而耦合GWR与ANN构建场景增强下的城市PM2.5浓度精细模拟模型,开展城市超高分辨率PM2.5浓度模拟,为我国大气污染防控新形势下城市内部空气质量浓度的精细监测与暴露风险规避提供科学依据.
1 数据与方法
1.1 研究区概况
湖南省长沙市主城区地处112°49′~113°14′E, 27°58′~28°24′N,总面积约920km2,因地势东西高、中北低,冬季空气污染颗粒物难以扩散.研究区包含有山地(岳麓山)、河谷(湘江)等多种地貌,因城镇化建设引起的建筑工地、扬尘地表增多,且城市结构复杂多样等多种因素,造成PM2.5浓度空间异质性较为明显.
1.2 场景理论假设与划分
PM2.5浓度的场景分异理论,指在社会功能、人群活动及污染扩散条件等地理环境配置皆相似的微环境场景内PM2.5浓度差异较小,地理环境配置不相同的场景间PM2.5浓度差异较大;所处地表覆盖类型相同但在不同场景时产生的PM2.5浓度贡献也有所差异.
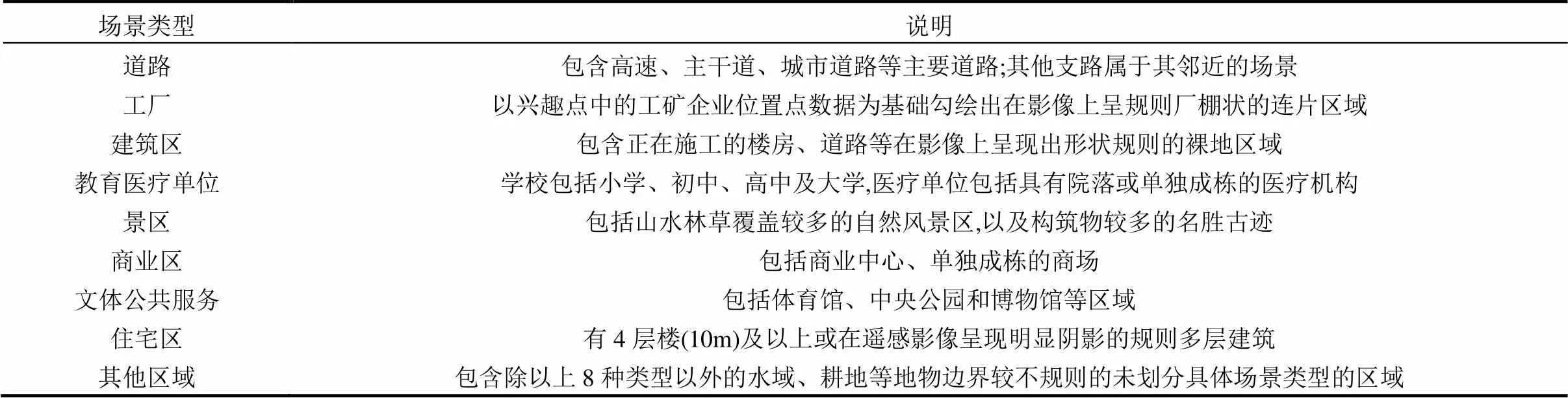
表1 场景划分类型说明
结合已有研究的污染先验知识[8],基于土地利用、兴趣点数据与谷歌地图在线服务,兼顾污染源及人类活动造成的PM2.5浓度潜在空间分异规律,结合地形及扩散条件等因素,开展城市微环境PM2.5场景人工判读勾绘,最终将研究区划分为9种场景类型,分别是道路、工厂、建筑区、教育医疗单位、景区、商业区、文体公共服务、住宅区和其他区域.具体定义及说明见表1,研究区场景划分结果如图1所示.

图1 研究区场景空间分布
1.3 PM2.5浓度加密观测
1.3.1 观测仪器 研究采用诺方SDL307激光监测仪,其分辨率为0.1μg/m3,大小仅7.3cm×7.3cm×2cm,具有响应快速、数据一致性较好的优点.为保证获取数据质量,分别对仪器在4个季节内进行室内与室外为期一周的PM2.5浓度持续观测,通过剔除观测值超过其他仪器平均值5%的仪器,从115台仪器中挑选出86台用于后续研究中的PM2.5浓度加密观测.同时,为检验SDL307监测数据与国控点数据的一致性,从选出的86台仪器中随机选择30台分成3组并保持同等高度安置于3个国控点附近,在2015年12月20~22日、29~31日的08:00~20:00时段进行PM2.5浓度同步观测.结果表明SDL307与国控点PM2.5小时浓度的决定系数在2个时段分别是0.89和0.90, 均方根误差分别为5.63,5.94μg/m3, SDL307监测结果基本可靠[26].
1.3.2 观测点布设 首先基于划分的场景空间分布,保证每个场景内有一个加密观测点.然后,参考PM2.5监测点布设原则[27],基于包含工矿企业、车站、医院、学校等多种类型的8万多条兴趣点,综合考虑研究区自然地理、气象条件及空气污染排放源特征,利用空间叠置、缓冲区分析等方法,对潜在污染严重区域适当增加观测点,适当剔除污染源较少地区观测点,同时保证不同梯度污染区及对照观测点的数量,最终选取代表性较好、对照性较强的203个加密观测点,具体分布如图2所示.

图2 研究区PM2.5加密观测站点分布
1.3.3 PM2.5浓度采集与数据预处理 PM2.5浓度数据采集时间为2015年12月24日08:00~13:00、25日13:00~19:00.通过征集86名志愿者手持仪器在离地约2m的高度采集PM2.5浓度数据;每个监测点每小时内重复观测3~4次,每次持续3min.观测数据结果通过手机APP,与地理坐标同步上传至数据库进行实时存储.通过异常数据剔除、地理坐标校正以及均值化处理得到最终各站点PM2.5小时浓度.根据数据采集时段的国控点污染情景,将PM2.5浓度数据分为轻度(24日)、重度(25日)2种污染情景进行分析.轻度污染情景下,08:00~13:00的PM2.5小时浓度整体均值依次为69.7, 73.0, 73.1, 74.1, 76.4,和77.7μg/m3,重度污染情景下,13:00~19:00的PM2.5小时浓度整体均值依次为174.4, 167.9, 165.9, 165.8, 162.7, 167.7, 171.9, 176.4μg/m3.
1.4 场景增强下的GWR-ANN模型构建
综合考虑影响因子对PM2.5浓度变化的空间异质性和非线性关系,本研究首先基于污染源相关变量构建GWR模型;然后,以GWR模型残差为输出层,以污染扩散相关与场景因子为输入层,构建ANN模型,实现GWR与ANN耦合,其基本框架如图3所示.
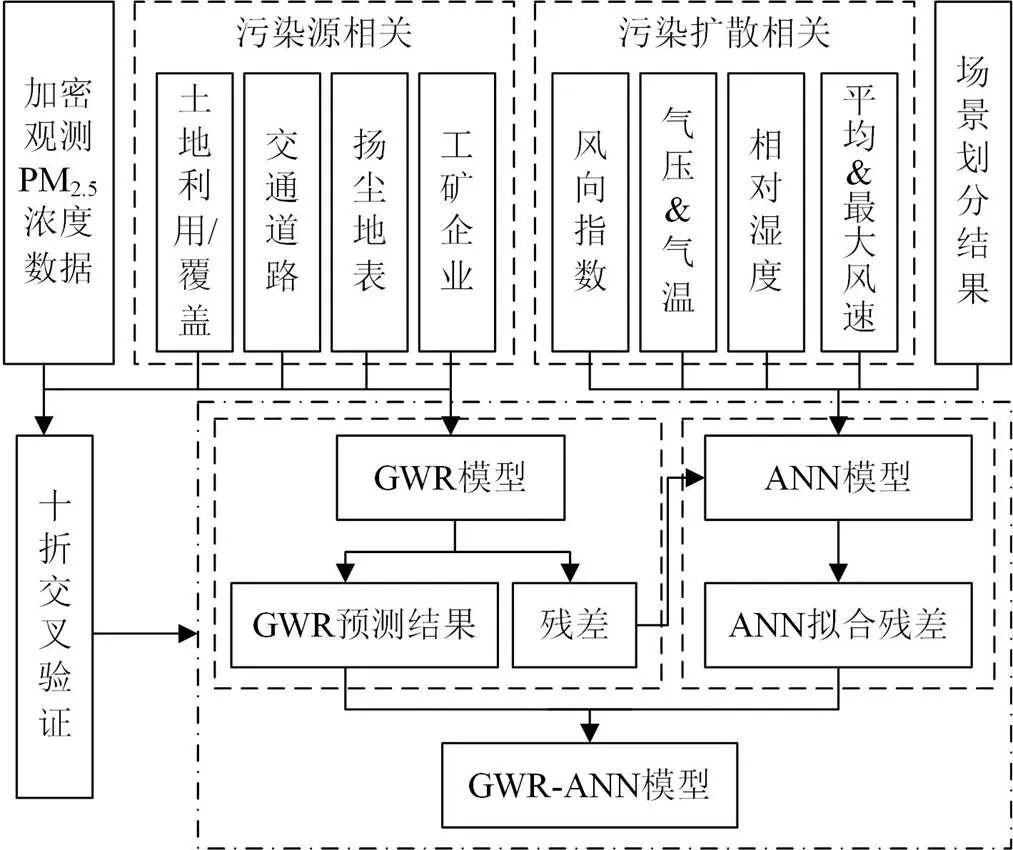
图3 GWR-ANN模型框架
1.4.1 建模变量提取与筛选 研究用于构建模型的因变量是PM2.5浓度加密观测数据,自变量包括与污染源相关的土地利用/覆盖、交通道路、扬尘地表和工矿企业数据,以及与污染扩散相关的气象要素、污染源风向指数和微环境场景类型.土地利用/覆盖与扬尘地表数据来自湖南省国土资源信息中心.其中,土地利用/覆盖按研究需求重分类为耕地、高密度林区、低密度林区、高密度住宅区、低密度住宅区、水域、城市绿地和其他建筑区8类.道路矢量数据来自国家基础地理信息中心(http://ngcc.sbsm.gov.cn),包含高速公路、国道、省道及其它道路.工矿企业数据来自地理国情监测云平台(http://www.dsac.cn/ ServiceCase/Detail/10502)提供的兴趣点数据.通过计算PM2.5监测站点50、100、200、500、1000、1500、2000、2500和3000m缓冲区内的各土地利用/覆盖类型、扬尘地表面积占比,道路长度以及工矿企业数量提取污染源相关变量.气象数据来源于中国气象局气象数据中心(http://data.cma.cn/).选取了研究区2015年12月24~25日平均气压、平均相对湿度、平均气温、平均风速、1h最大风速和风向的小时值数据.落在研究区内的气象站点仅5个,参考相关研究[18],采取反距离加权插值获取各要素空间分布并利用ArcGIS的提取值到点工具提取PM2.5监测站点对应气压、相对湿度、气温、平均风速以及1h最大风速值.微环境场景类型变量采用哑元变量表示.污染源风向系数参考文献[28],按照式(1)计算:
Wind index = (1-cos()) / 2 (1)
式中:表示交通、扬尘地表和工矿企业3种污染源到PM2.5浓度监测站点的欧氏方向;取距离PM2.5浓度监测站点最近的气象站盛行风方向为该监测点盛行风方向.风向指数取值范围为0~1,0代表PM2.5浓度监测点在最近污染源的上风向,1代表PM2.5浓度监测点在最近污染源的下风向.
采用向前引入法对提取的变量进行筛选,其基本思想是:将候选自变量逐个引入回归方程,进行回归系数的显著性检验,决定取舍,依次类推,直至在排除了已选入变量对因变量的影响之后,未选入自变量对因变量的回归系数的显著性检验结果都不显著为止.本研究筛选GWR变量的过程分为3步:第一步,基于相关性分析,剔除显著性-value>0.01的变量;第二步,进行共线性检验,剔除VIF>10的变量;第三步,将经过以上2步剔除后的剩余变量利用向前引入法逐个引入,选择AIC值最小、调整R最高的变量组合,参与最终的模型构建.
1.4.2 GWR模型构建 GWR模型是传统多元线性回归的拓展,通过结合样本点地理位置,局部线性回归得到每个样本点的回归系数,具有可解释PM2.5浓度及影响因子的空间变异关系的能力[16].在监测点处的GWR模型可用式(2)表示:
y=0(u,v) + ∑=1β(u,v)x+ε(2)
式中:y表示因变量,本研究中指监测点的PM2.5浓度;(u,v)指监测点的地理坐标;0(u,v)与β(u, v)分别表示监测点的截距与第个回归系数;ε是随机误差.
根据加权最小二乘法原理,在监测点的回归系数a可通过式(3)得到:
a=min∑=1w(y−β0−∑=1βx)2(3)
式中:w为权函数,是监测点与其相邻的某个观测点之间距离的单调递减函数.本研究采用高斯权函数:
w=exp [−(d/)2] (4)
式中:d为监测点与其相邻的某个观测点之间的欧式距离;为带宽,是空间权重与距离之间的一种函数关系.本研究采用自适应权函数带宽优化方法和Akaike信息量准则(AIC)确定最优带宽.
1.4.3 ANN模型构建 ANN模型是一种仿生物神经网络特点进行信息处理的模型,依据学习算法的不同可分为多种类型.其中,BP神经网络是一种按误差逆传播算法训练的前馈神经网络,因其算法简单、无需提前揭示描述映射关系的数学模型及较好的训练效果,而成为目前使用较多的一种神经网络模型[24].因此,本研究采取BP神经网络模型参与场景增强下的PM2.5浓度时空精细模型构建.BP神经网络包含输入层、隐含层和输出层,层间神经元通过权连接,同一层内神经元之间无数据信息交流.输入数据通过输入层神经元,经传递函数转换后传递到隐含层,再由隐含层通过激活函数放大后传递到输出层并输出.当实际误差超出期望误差时,误差值沿网络反向传播修改各神经元之间的连接权值和阈值,重复训练网络直到满足期望误差,以此确定输入数据与输出数据之间的映射关系.
本研究BP神经网络隐含层神经元传递函数采用S型tansig正切函数(式(5)),输出层神经元传递函数采用S型logsig变换函数(式(6)).
()2/(1+e2x) −1 (5)
()1/(1+e) (6)
式中:表示对该神经元的输入.
输入与输出层神经元个数分别是自变量与因变量个数.隐含层神经元个数根据式(7)确定:
= 2+(7)
式中:表示隐含层神经元个数;、分别表示输入层、输出层神经元个数.
训练函数采用L-M(Levenberg-Marquardt)法, L-M算法是拟牛顿法的改进算法,其效率高且计算量小.为克服BP神经网络收敛性较差、极易受初始权值和阈值选择的影响、容易陷入局部最优的局限性,本文利用GA的全局寻优特性,找出可以使BP神经网络得到最优解的初始权值和阈值,应用到BP神经网络学习训练中,最终得到最优的模拟结果[25]. GA优化BP神经网络的要素包括:种群初始化、适应度函数、选择算子、交叉算子和变异算子.本文的GA优化BP神经网络的运行参数如表2所示:

表2 GA优化BP神经网络运行参数设定
1.4.4 模型精度评价 采用十折交叉验证检验模型稳定性及泛化能力.交叉验证的精度评价指标包括PM2.5浓度的模型估算值与实测值的拟合优度2、调整2、相对误差()、均相对误差(MRE:检验样本相对误差的均值)和均方根误差(RMSE).其中,2和调整2取值范围为0~1,其值越接近1表示模型拟合效果越好;MRE和RMSE代表模型预测浓度偏离实际观测浓度的程度,、MRE和RMSE值越小表示模型检验精度越高.
2 结果与讨论
2.1 城市PM2.5浓度的场景特异性
2.1.1 整体特征 城市不同类型微环境场景下PM2.5浓度统计情况如表3所示.各场景间PM2.5浓度具有明显差异,轻度污染情景下场景间浓度差异较小,而重度污染情景下差异较大.轻度污染情景下,商业区场景的PM2.5浓度均值最高而其他区域场景类型最低,分别为78.8,65.0μg/m3.但后者标准差最大,为19.5μg/m3,教育医疗单位场景标准差则最小,为11.6μg/m3.重度污染情景下, PM2.5浓度均值最高和最低的场景类型分别为建筑区与景区,其值分别为176.3与157.3μg/m3.建筑区场景的PM2.5浓度标准差值最大,为25.9μg/m3,其他区域场景类型最小,为8.7μg/m3.
2.1.2 时间变化规律 各微环境场景内PM2.5浓度均值的逐小时变化情况如图4所示.总体而言,在轻度污染情景下, 08:00~13:00,道路、工厂、建筑区、文体公共服务和住宅区内PM2.5浓度随时间的变化大致呈现递增趋势;教育医疗单位、景区、商业区和其他区域场景则不同,前三类场景12:00时的PM2.5浓度小时均值均高于13:00,其他区域场景08:00的PM2.5浓度高于09:00.重度污染情景下,道路、景区和文体公共服务的PM2.5浓度逐小时变化呈现U型, PM2.5浓度高峰值主要出现在交通午高峰和晚高峰;工厂场景在14:00时的PM2.5浓度高于13:00;建筑区场景的PM2.5浓度低谷值出现在15:00;教育医疗单位场景的PM2.5浓度晚高峰出现在18:00;商业区场景内,PM2.5浓度自14:00缓慢上升至16:00后略有下降,17:00再次上升;其他区域场景在18:00时浓度最大,住宅区场景浓度谷值出现在16:00.

表3 各场景PM2.5浓度均值(μg/m3)和标准差统计结果

进一步分析可知,每个小时PM2.5浓度场景特异性存在显著差异.在轻度污染情景下,08:00时PM2.5浓度高值出现在道路场景内,其他类型场景内浓度均值较为接近; 09:00~10:00,商业区场景浓度最高; 11:00与12:00时教育医疗单位和商业区场景PM2.5浓度最高;13:00时,道路场景内PM2.5浓度均值大幅升高,其他区域场景在时段内污染浓度始终最低. 分析原因,该时段研究区污染源以本地机动车尾气为主,早午高峰时期道路易拥堵,污染容易加剧,而商业与教育医疗场景均为人、车流量较大区域,且观测时段内以阴雨天气为主,湿度较大,污染不易扩散.其他区域场景地表覆盖以污染源较少的水域、耕地等为主,其PM2.5浓度因而相对较低.在重度污染情景下,13:00~15:00时,PM2.5浓度始终在住宅区场景最高;16:00时商业区场景最高;至17:00,住宅区与建筑区场景PM2.5浓度显著升高,成为最高值场景,18:00~ 19:00,建筑区场景PM2.5浓度远高于其他类型;景区与工厂场景在时段内污染浓度始终较低. 这可能是因为景区植被覆盖率高、一定范围内污染源少,而研究区以轻工业和高新技术产业为主,污染排放相对重工业城市较少,且工业园附近通常地势开阔,高层建筑较少,对污染扩散的阻挡作用较小.傍晚建筑区污染浓度的显著升高可能是由于逆温层的出现阻碍了建筑扬尘的扩散.
2.1.3 同地表异场景PM2.5浓度差异 选取地表覆盖类型同为道路但分别属于建筑区和景区场景的2个监测点,统计分析2个点处PM2.5浓度差,结果如表4所示.地表覆盖类型相同但所属场景不同的2个监测点处PM2.5浓度可能存在较大差异且差异大小随时间变化.在轻度污染情景下,08:00~09:00时, 2个监测点PM2.5浓度差最大,分别为42,44μg/m3, 09:00~13:00时,2个监测点PM2.5浓度差持续减小至18μg/m3,尤其在09:00~11:00,浓度差下降急剧,11:00~13:00开始趋于平缓.重度污染情景下,两监测点处PM2.5浓度差的变化趋势与轻度污染情景正好相反. 13:00~14:00时2个监测点处的PM2.5浓度差稍有下降,分别为34, 23μg/m3; 14:00~19:00呈增长趋势,14:00~17:00缓慢增长至42μg/m3,17:00~19:00急剧升高达到110μg/m3.综合以上结果可知,基于先验知识划分的场景分布能够在一定程度上体现污染的场景差异,但此种差异随着污染情景和时间的不同而变化,要掌握城市PM2.5浓度场景特异性的分异规律仍需要更长时序与更高密度的污染观测.

表4 同地表覆盖不同场景监测点PM2.5浓度差
2.2 场景增强下的GWR-ANN模型
2.2.1 GWR模型结果 轻度和重度污染情景下, PM2.5浓度小时GWR模型构建结果如表5所示.可知每小时PM2.5浓度GWR模型的预测变量在类型和尺度上均有所差异,但高密住宅区面积占比和道路密度变量对于PM2.5浓度预测有重要作用.
轻度污染情景下,除09:00外,其他5h的GWR最优模型的预测变量均含有住宅区面积占比.08:00时PM2.5浓度GWR最优模型的预测变量是缓冲区半径2500m内的低密度住宅区面积占比和3000m范围内其他建筑区面积占比. 09:00时为扬尘地表面积占比.10:00~13:00时GWR最优模型的预测变量皆含高密住宅区面积占比,但10:00和11:00的缓冲区半径为200m,12:00时为100m,13:00时为500m,且13:00的变量还有缓冲区半径为3000m的低密度住宅区面积占比.轻度污染情景下的GWR最优模型调整2介于0.54~0.82,12:00时模型调整2最低而09:00时最高.
重度污染情景下,除18:00时外,其他6h的GWR最优模型预测变量均含有道路密度,其中13:00~ 17:00缓冲区半径均为500m,16:00的模型预测变量还包含低密度林地面积占比.18:00的GWR最优模型预测变量仅有低密度林地面积占比.19:00的GWR最优模型预测变量较多,包含高密度林地面积占比、低密度住宅区面积占比和缓冲区半径为300m的道路密度3个预测变量.重度污染情景下的GWR最优模型调整R范围为0.42~0.77,18:00时最低, 14:00和15:00时最高.
2.2.2 GWR-ANN模型结果 表6为每小时GWR-ANN模型拟合效果2、MRE和RMSE结果.总体而言,有场景参与模型构建的逐小时GWR- ANN模型拟合效果优于无场景参与模型,其拟合2更高,MRE与RMSE更低.其中,前者拟合2介于0.89~0.99,MRE介于0.67%~6.49%之间,平均为2.39%,RMSE介于1.63~5.55μg/m3之间,平均为3.28μg/m3,后者拟合2范围为0.83~0.98,MRE则介于0.76%~7.65%之间,平均为3.26%, RMSE介于2.16~7.94μg/m3之间,平均为4.46μg/m3.

表5 GWR最优模型构建结果
注:LR_2500、Oth_3000分别代表监测站点2500m、3000m缓冲区内低密度住宅区、其他建筑区面积占比;Yca_1500代表监测站点1500m缓冲区内扬尘地表面积占比;HR_200、HR_100、HR_500分别代表监测站点200、100、500m缓冲区内的高密度住宅区面积占比;LR_3000代表监测站点3000m缓冲区内低密度住宅区面积占比;Roa_500、Roa_300分别代表监测站点500、300m缓冲区内道路密度;LF_3000代表监测站点3000m缓冲区内低密度林地面积占比;HF_1000代表监测站点1000m缓冲区内高密度林地面积占比.
从不同污染情景来看,重度污染情景下的有场景模型拟合效果整体优于轻度污染情景.轻度污染情景下,PM2.5浓度有场景GWR~ANN模型拟合2介于0.89~0.98之间,平均为0.95,MRE介于2.07%~ 6.49%之间,平均为3.75%,RMSE介于2.11~5.55μg/ m3之间,平均为3.51μg/m3.重度污染情景下,拟合2介于0.95~0.99之间,平均为0.97,MRE介于0.67%~ 1.99%之间,平均为1.22%,RMSE介于1.63~ 5.02μg/m3之间,平均为3.08μg/m3.

表6 有无场景参与建模时的GWR-ANN模型拟合效果
图5为每小时GWR-ANN模型十折交叉检验PM2.5浓度预测值与实测值散点图.有场景参与模型的检验2、MRE、RMSE结果整体上优于无场景模型.有场景模型检验2范围为0.59~0.84,MRE介于2.78%~9.10%,平均为5.79%, RMSE介于6.03~12.97μg/m3,平均为8.19μg/m3,无场景模型检验2则介于0.57~0.81, MRE介于3.15%~10.47%,平均为6.21%, RMSE介于6.41~14.08μg/m3,平均为8.81μg/m3.除轻度污染情景下09:00和12:00、重度污染情景下13:00和19:00外,其他9个小时的有场景参与模型构建的检验2均高于无场景模型(0.76~0.84vs.0.57~0.81),MRE(2.78%~9.10% vs.3.15%~10.47%)与RMSE(6.03~9.31μg/m3vs. 6.41~14.08μg/m3)则更低.

图5 交叉验证有/无场景参与GWR-ANN模型PM2.5浓度预测值与实测值散点
从不同污染情景来看,重度污染情景下的有场景模型检验效果优于轻度污染情景.轻度污染情景下,PM2.5浓度有场景GWR-ANN模型检验2介于0.59~0.82之间,平均为0.75,MRE介于6.98%~9.10%之间,平均为8.32%,RMSE介于6.87~9.33μg/m3之间,平均为7.74μg/m3.重度污染情景下,检验2介于0.67~0.84之间,平均为0.79,MRE介于2.78%~5.08%之间,平均为3.62%,RMSE介于6.03~12.97μg/m3之间,平均为8.58μg/m3.这与重度污染情景下城市PM2.5浓度的场景间差异更为显著的结论一致,进一步表明城市微环境场景的污染特征会随着污染情景的不同而发生改变.但通过对比模型拟合与检验2可知,GWR-ANN模型存在一定过拟合现象,通过加入更符合实际状况的动态变化的场景变量以及时间变量、污染情景变量等,或引入其他方法改进优化模型,提高模型的泛化能力仍有待进一步的研究.
2.3 PM2.5浓度空间分异特征
图6为轻度和重度污染情景下利用场景增强的GWR-ANN模型对长沙市主城区100m×100m格网点PM2.5浓度进行估算,得到的超高空间分辨率PM2.5浓度逐时空间分布图.可以看到PM2.5浓度空间分布特征随着时间发生差异较大的变化.
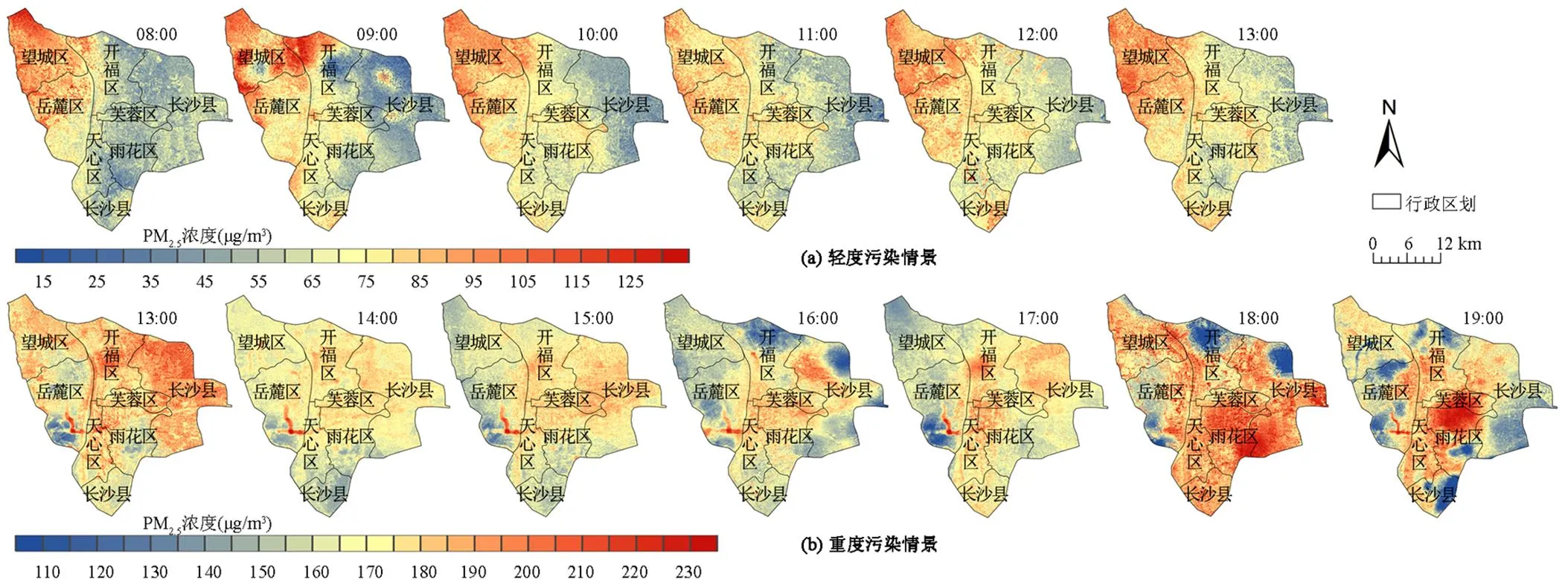
图6 场景增强下的GWR-ANN模型预测PM2.5浓度空间分布
轻度污染情景下,PM2.5浓度在08:00~13:00整体呈现西北高-东部低的阶梯变化趋势.此外,各小时PM2.5浓度高低值格局也随着时间发生演变,表现为高值区域范围大小及PM2.5浓度值的变化.具体来说,相较于08:00,09:00时PM2.5浓度高值区由西北角扩散到研究区北部,并且在西北高值区域出现了小范围PM2.5浓度低值区域;10:00与11:00研究区整体呈现差异较为缓和的西北高-东部低的三级阶梯变化特征;在交通午高峰时期的12:00,PM2.5浓度低值区几乎消失,直至13:00,在东部和南部出现了PM2.5浓度低值区.西北地区PM2.5浓度整体偏高的主要原因可能是该区域城市建设活动频繁,建筑扬尘较多,加之监测时段以阴雨天气为主相对湿度较大使得地表浓度升高.
相对于轻度污染情景下的PM2.5浓度高低值区域较为固定无明显差异,重度污染情景下的PM2.5浓度空间分布格局随时间的变化较为明显.13:00~ 19:00,在研究区西南角均有一个呈狭窄长条状的PM2.5浓度高值区域,其他PM2.5浓度高值区则主要在研究区东北部-东南部-中部发生变化.相较于13:00时PM2.5浓度东北高-西南低的整体特征,14:00研究区整体PM2.5浓度较低,东北部高值区消失,研究区南部出现了低值区;直至17:00,区域PM2.5浓度趋势整体一致,除16:00在北部与东北边缘处出现较低值;18:00,受交通晚高峰影响,除在研究区北部、东北部和西部出现小范围低值区外,研究区整体PM2.5浓度较高;至19:00,PM2.5浓度高值区转移到研究区中部.西南角的窄长条状的PM2.5浓度高值区域可能是由于该区域为西二环、南二环以及猴子石大桥连接处,交通状况较差,常出现拥堵现象.
以上结果表明场景增强下的GWR-ANN模型能够较好地揭示城市内部小时PM2.5浓度的空间差异,然而,由于加密观测成本高、数据传输技术难度大等困难,本研究仅在长沙市主城区,针对主要污染物PM2.5开展了2个污染情景下时间较短的小时尺度加密观测与场景增强下的GWR-ANN建模.但值得注意的是,不同时间分辨率下大气污染的场景特异性可能存在差别,场景对于污染浓度空间模拟精度的提升作用也会有所差异,随着低成本传感器与无线传输技术的进一步发展,未来在基于长时间序列高密观测的基础上掌握城市大气污染浓度场景特异性的时间分异规律,进而实现面向场景理解的多尺度城市大气浓度空间分布高精度模拟仍有待更为深入的研究.
3 结论
3.1 不同场景PM2.5浓度存在显著时空差异,地表覆盖类型相同但分别位于2个不同场景的监测点间PM2.5浓度差随时间发生变化,各时相浓度差范围为18~110μg/m3.
3.2 微环境场景增强下的GWR-ANN模型能够有效精细模拟PM2.5浓度的空间分布,模型拟合效果与交叉检验精度指标整体优于无场景变量参与的GWR-ANN模型.各时相模型拟合2范围分别为0.89~0.99与0.83~0.98,检验2除部分时相较为接近外, 范围分别为0.76~0.84和0.57~0.81.
3.3 场景增强下的PM2.5浓度空间分布100m级分辨率模拟估算结果可以较好揭示研究区PM2.5浓度高低值局地变化特征,轻度污染情景整体西北高,东部低,重度污染情景空间格局随时间变化特征显著.
[1] 杨复沫,马永亮.细微大气颗粒物PM2.5及其研究概况[J]. 世界环境, 2000,4:32-34. Yang F M, Ma Y L. A brief introduction to PM2.5and related research [J]. World Environment, 2000,4:32-34.
[2] Zou B, You J, Lin Y, et al. Air pollution intervention and life-saving effect in China [J]. Environment International, 2019,125:529-541.
[3] Cohen A J, Brauer M, Burnett R, et al. Estimates and 25-year trends of the global burden of disease attributable to ambient air pollution: an analysis of data from the Global Burden of Diseases Study 2015 [J]. The Lancet, 2017,389(10082):1907-1918.
[4] 中华人民共和国生态环境部.2017中国生态环境状况公报[EB/OL]. http://www.mee.gov.cn/hjzl/zghjzkgb/lnzghjzkgb/201805/ P020180531534645032372.pdf, 2018-05-31/2018-11-12. Ministry of Ecology and Environment of the People’s Republic of China, Communique of the People's Republic of China on the 2017national ecological and environmental state [EB/OL]. http://www. mee.gov.cn/hjzl/zghjzkgb/lnzghjzkgb/201805/P020180531534645032372.pdf, 2018-05-31/2018-11-12.
[5] World Health Organization, World Health Statistics 2018: Monitoring health for the SDGs, sustainable development goals [EB/OL]. https: //apps.who.int/iris/bitstream/handle/10665/272596/9789241565585-eng.pdf?ua=1, 2018-06-06/2018-11-12.
[6] 易 兰,周忆南,李朝鹏,等.城市机动车限行政策对雾霾污染治理的成效分析[J]. 中国人口·资源与环境, 2018,28(10):84-90. Yi L, Zhou Y N, Li C P, et al. Analysis of the effects of driving restriction policies in controlling haze pollution [J]. China Population Resources and Environment, 2018,28(10):84-90.
[7] Apte J S, Messier K P, Gani S, et al. High-resolution air pollution mapping with Google street view cars: exploiting big data [J]. Environmental Science & Technology, 2017,51(12):6999-7008.
[8] 胡晨霞,邹 滨,李沈鑫,等.城市微环境PM2.5浓度空间分异特征分析 [J]. 中国环境科学, 2018,38(3):910-916. Hu C X, Zou B, Li S X, et al. Spatial heterogeneity analysis of PM2.5concentrations in intra-urban microenvironments [J]. China Environmental Science, 2018,38(3):910-916.
[9] 刘永红,余 志,黄艳玲,等.城市空气污染分布不均匀特征分析[J]. 中国环境监测, 2011,27(3):93-96. Liu Y H, Yu Z, Huang Y L, et al. Characteristic analysis on uneven distribution of air pollution in cities [J]. Environmental Monitoring in China, 2011,27(3):93-96.
[10] Liao D, Peuquet D J, Duan Y, et al. GIS approaches for the estimation of residential-level ambient PM concentrations [J]. Environmental Health Perspectives, 2006,114(9):1374-1380.
[11] El-Harbawi M. Air quality modelling, simulation, and computational methods: a review [J]. Environmental Reviews, 2013,21(3):149-179.
[12] Liu Y, Park R J, Jacob D J, et al. Mapping annual mean ground-level PM2.5concentrations using Multiangle Imaging Spectroradiometer aerosol optical thickness over the contiguous United States [J]. Journal of Geophysical Research: Atmospheres, 2004,109(D22206):1-10.
[13] Liu Y, Paciorek C J, Koutrakis P. Estimating regional spatial and temporal variability of PM2.5concentrations using satellite data, meteorology, and land use information [J]. Environmental Health Perspectives, 2009,117(6):886-892.
[14] Johnson M, Isakov V, Touma J S, et al. Evaluation of land-use regression models used to predict air quality concentrations in an urban area [J]. Atmospheric Environment, 2010,44(30):3660-3668.
[15] Hankey S, Marshall J D. Land use regression models of on-road particulate air pollution (particle number, black carbon, PM2.5, particle size) using mobile monitoring [J]. Environmental Science & Technology, 2015,49(15):9194-9202.
[16] Zou B, Pu Q, Bilal M, et al. High-resolution satellite mapping of fine particulates based on geographically weighted regression [J]. IEEE Geoscience and Remote Sensing Letters, 2016,13(4):495-499.
[17] Guo Y, Tang Q, Gong D Y, et al. Estimating ground-level PM2.5concentrations in Beijing using a satellite-based geographically and temporally weighted regression model [J]. Remote Sensing of Environment, 2017,198:140-149.
[18] Fang X, Zou B, Liu X, et al. Satellite-based ground PM2.5estimation using timely structure adaptive modeling [J]. Remote Sensing of Environment, 2016,186:152-163.
[19] Zou B, Chen J, Zhai L, et al. Satellite based mapping of ground PM2.5concentration using generalized additive modeling [J]. Remote Sensing, 2016,9(1):1-16.
[20] Xiao L, Lang Y, Christakos G. High-resolution spatiotemporal mapping of PM2.5concentrations at Mainland China using a combined BME-GWR technique [J]. Atmospheric Environment, 2018,173:295-305.
[21] Gupta P, Christopher S A. Particulate matter air quality assessment using integrated surface, satellite, and meteorological products: 2. A neural network approach [J]. Journal of Geophysical Research: Atmospheres, 2009,114(D20205):1-14.
[22] Liu Y, Cao G, Zhao N, et al. Improve ground-level PM2.5concentration mapping using a random forests-based geostatistical approach [J]. Environmental Pollution, 2018,235:272-282.
[23] Zou B, Wang M, Wan N, et al. Spatial modeling of PM2.5concentrations with a multifactoral radial basis function neural network [J]. Environmental science and pollution research, 2015, 22(14):10395-10404.
[24] 郭建平,吴业荣,张小曳,等.BP网络框架下MODIS气溶胶光学厚度产品估算中国东部PM2.5[J]. 环境科学, 2013,34(3):817-825. Guo J P, Wu Y R, Zhang X Y, et al. Estimation of PM2.5over eastern China from MODIS aerosol optical depth using the back propagation neural network [J]. Environmental Science, 2013,34(3):817-825.
[25] 武 妍,万 伟.基于遗传算法设计和训练人工神经网络的方法[J]. 红外与毫米波学报, 2007,26(1):65-68. Wu Y, Wan W. Method on designing and training of artificial neural network based on genetic algorithm [J]. Journal of Infrared and Millimeter Waves, 2007,26(1):65-68.
[26] Xu S, Zou B, Lin, Y, et al. Strategies of method selection for fine-scale PM2.5mapping in an intra-urban area using crowdsourced monitoring [J]. Atmospheric Measurement Techniques, 2019,12:2933-2948.
[27] HJ644-2013 环境空气质量监测点位布设技术规范(试行) [S]. HJ644-2013 Technical regulation for selection of ambient air quality monitoring stations (on trial) [S].
[28] Ryan P, LeMastersa G, Levin L, et al. A land-use regression model for estimating microenvironmental diesel exposure given multiple addresses from birth through childhood [J]. Science of the Total Environment, 2008,404(1):139-147.
Urban scene-oriented simulation of the spatial distribution of PM2.5concentration in an intra-urban area at fine scale.
XU Shan, ZOU Bin*, HU Chen-xia
(School of Geosciences and Info-Physics, Central South University, Changsha 410083, China)., 2019,39(11):4570~4579
The traditional spatial simulation technologies of PM2.5concentration usually ignored the mechanism behind the PM2.5-urban scenes (e.g. roads, factory, residential area, scenic area) correlation. This study proposed an urban scene assumption of PM2.5concentration, namely the PM2.5concentration is rather homogeneous within an urban scene while heterogeneous between different urban scenes. Taking the intra-urban area of Changsha, Hunan as an example, the spatial distribution of urban scenes was manually interpreted using a priori knowledge and a high-density monitoring sampling campaign was conducted for two periods in December 24~25, 2015. Based on the hourly PM2.5concentration observations from 203 sampling sites and the urban scene map, the urban scene difference of PM2.5concentration was explored and an urban scene enhanced two-stage modelling strategy of geographically weighted regression and artificial neural networks (GWR-ANN) was developed. The spatial patterns of PM2.5concentrations were simulated based on GWR-ANN at the 100×100m resolution. Results show that the spatiotemporal variations of PM2.5concentration between urban scenes do exist and the difference of PM2.5concentration for sampling sites with the same land use/cover in two different types of urban scenes varied with time. The urban scene enhanced GWR-ANN could be effective in spatial simulation of PM2.5concentrations at fine scale. The GWR-ANN model with urban scene variable performed better than the GWR-ANN model without urban scene variable. Except for five sampling hours with rather close statistics, the cross-validation2between estimated PM2.5concentration and observed PM2.5concentration for GWR-ANN with urban scene were higher than GWR-ANN without urban scene (0.76~0.84vs. 0.57~0.81). The spatial patterns of PM2.5concentrations based on urban scene enhanced GWR-ANN could be effective in disclosing detail hot-spots and cold-spots of PM2.5pollution.
PM2.5;pollution mapping;urban scene assumption;GWR;ANN
X511
A
1000-6923(2019)11-4570-10
许 珊(1990-),女,湖南衡阳人,中南大学博士研究生,主要从事城市大气污染模拟与制图研究.发表论文6篇.
2019-04-22
国家重点研发计划(2016YFC0206201,2016YFC0206205);国家自然科学基金资助项目(41871317);中南大学创新驱动计划项目(2018CX016)
* 责任作者, 教授, 210010@csu.edu.cn