基于CLAHE的钢管混凝土脱空检测热像图增强方法
2019-11-07谭书林许里杰
张 顺,谭书林,许里杰,陈 磊
(重庆交通大学土木工程学院,重庆 400074)
钢管混凝土是钢管混凝土拱桥的基本结构,它结合了钢管抗弯能力强与混凝土抗压强度高等优势,使得钢管混凝土拱桥具有承载能力强、跨度大等优点。但是,由于温度、施工方法、混凝土收缩徐变的影响等[1-2]原因,钢管混凝土结构会逐渐产生脱空,这对结构非常不利。因此,为保障结构服役安全,需要对钢管混凝土内部质量进行监测,这对指导钢管混凝土结构的合理修复加固、减少经济损失具有十分重要的意义。常用于结构内部质量无损检测的技术有超声波检测、弹性波回弹检测以及红外热像检测等[3-5]。红外热像损伤检测是近年来发展起来的一种非接触无损检测方法,具有快速、图像直观、不受场地限制等优点,但是其热图本身存在分辨率低、缺陷与非缺陷区域对比度不够高的问题。针对上述不足,国内外研究人员在使用红外热像损伤检测的同时,也致力于图像处理技术的研究。Tighe等[6]采用了脉冲相位红外热成像的方法对碳纤维增强塑料(CFRP)的不同类型的缺陷进行了检测分析。结果表明,红外无损检测的方法能够较好地对缺陷进行检测。胡爽[7]用红外热像技术对钢管混凝土密实度缺陷进行了研究,对钢管混凝土表面温度和缺陷深度计算公式进行了理论推导,并且通过实验得到主动检测法和被动检测法针对壁管厚度的使用范围。赵迪等[8]采用多分辨率奇异值分解的图像融合方法,重构热图,并采用模拟退火算法对重构的图像进行增强处理,提高了图像的清晰度和辨识率。冯琪智等[9]采用热图重构(TSR)算法挖掘隐藏的缺陷信息,并采用区域生长算法显著提高缺陷区域与非缺陷区域的对比度,实现缺陷的精确检出。可以看出红外热成像损伤检测技术非常适用于检测钢管混凝土脱空,但由于热图对比度低且缺陷信息不明显,导致缺陷难以准确识别。
基于此,本文提出一种基于CLAHE的钢管混凝土脱空检测热像图增强方法。该方法采用TSR算法将每个像素点的温度响应曲线从时域转换到对数域,再用多项式进行拟合,进而求其一阶、二阶微分,从而挖掘出隐藏的缺陷信息,然后对重构后的图像进行增强处理,最终在提高热图分辨率以及缺陷与非缺陷之间对比度的同时,还能缩短加热时间,提前识别出缺陷。
1 增强图像处理技术简介
1.1 钢管混凝土脱空检测的提出
利用红外热成像技术对钢管混凝土进行内部核心混凝土脱空检测的原理是:在对待测钢管混凝土加热后,利用结构表面的温差实现钢管混凝土脱空检测。当钢管混凝土结构发生脱空时,脱空区域被空气填充,其热导率低于非脱空区域混凝土的热导率,阻碍脱空处钢管表面热量的传递,从而使得脱空区域与非脱空区域的钢管表面温度存在差异。钢管混凝土表面辐射出的热量经过大气作用后,被红外热像仪采集,经过软件、硬件设施处理后转换为包含温度信息的热像图,从而反映出钢管混凝土结构的脱空信息。
红外热成像检测按加热方式分类可分为被动式检测和主动式检测。被动式检测是指在自然条件下不经过外加热源的检测方式,虽然操作简单,但是检测效果一般且需长时间太阳光持续照射;主动式检测指人为外加热源加热被检测试件,加快结构表面的温度变化,节省了检测时间。但是热图本身始终存在分辨率低、缺陷与非缺陷区域对比度不够高的问题。
针对上述问题,本文提出一种基于有限对比适应性直方均衡化的钢管混凝土脱空检测方法,主要由基于热图重构的红外热像融合和基于CLAHE的红外热像图增强两部分组成。前者将视频数据的每一帧图像进行向量化,并将整个视频序列转为矩阵,将每个像素点温度响应曲线从时域转换到对数域,并求其一阶导和二阶导得到重构图像,能更加清晰地反应缺陷与非缺陷区域温度变化响应的区别;后者在前者得到的重构图像基础上采用CLAHE算法对图像进行增强处理,实现缺陷的精确检出,同时还可提前发现缺陷,使加热时间缩短,从而能够更准确更快速地对钢管混凝土脱空进行定性。
1.2 基于热图重构的红外热像融合
1.2.1 表面温度数学模型
在外界热源激励的情况下,被加热钢管混凝土的表面温度随着激励时间t的变化而发生改变,在表面照射能量Q趋于平衡的过程中,可将每个像素点的温度变化简化为简单的一维热传导模型,则钢管混凝土的表面温度Tsurface(t)可表示为:
(1)

1.2.2 热图重构(TSR)算法原理
热图重构算法将每帧图像的每个对应像素点的温度信息按照时间顺序提取出来,从而得到每个像素点温度变化-时间曲线,简化该曲线从时域转到对数域,TSR算法的表达式式(1)两边取对数运算得到
(2)
由于Q趋于平衡,所以变量只有时间t。对于理想的非脱空区域,由式(2)绘制出的对数衰减响应曲线应是斜率为-1/2的直线。然而,在实际应用中,温度响应曲线会受到背景辐射、缺陷区域及非线性相位响应等的影响,出现不满足理想线性关系的情况。因此可采用n次多项式函数来近似拟合每个像素点的对数温度变化,不仅能消除噪音,还提高了图像的质量,其表达式为:

(3)
通过计算式(3)的一阶和两阶微分,分别获得表面温度曲线在时间轴上的变化率和凹凸性,可进一步挖掘出缺陷信息。所以获得重构之后的图像能更加清晰地反应脱空区域和非脱空区域温度变化相应的区别。计算结果如下:
(4)
(5)
1.2.3 实现步骤
采用热成像信号重构算法,将红外热像仪采集到的视频序列转为重构后的热像图灰度矩阵序列,主要的步骤如下:
Step 1 将红外热像仪收集到的视频文件转灰度矩阵,包括将视频转为图像、提取图像温度信息、图像向量化以及按时间顺序组合列向量生成新的矩阵,示意图见图1。
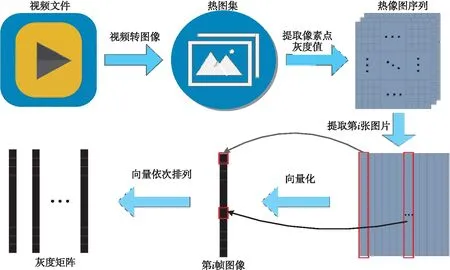
图1 视频转化为矩阵过程
Step 2 将获取的灰度矩阵里每个像素点温度响应曲线从时域转换到对数域,其中灰度矩阵中每一行即为一个点像素在时域的变化情况。点像素随时间变化的温度响应曲线见图2。
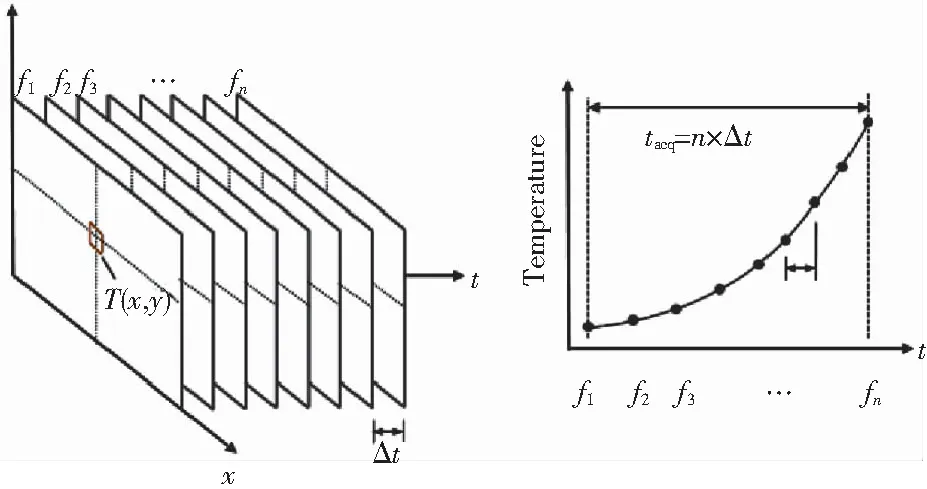
图2 像素随时间变化的温度响应图
Step 3 多项式拟合每个像素点的对数温度变化,并求其一阶、两阶偏导,从而得到重构的新的热图序列。
1.3 基于CLAHE的红外热像图增强
红外热成像技术在诸多领域已得到运用,并取得较为满意的成果,但热图本身存在着分辨率低、缺陷与非缺陷处对比度不够高的问题;因此需要采用图像增强算法来解决此问题。
常见的图像增强算法有直方图均衡化算法(histogram equalization,HE)和自适应直方图均衡化(adaptive HE)。HE是一种全局性增强方法,把原始图像的灰度直方图从比较集中的某个灰度区间拉伸成全部灰度范围内的均匀分布,从而扩大了图像灰度的动态分布范围,改善了整体的视觉效果;但是该算法在拉伸过程中可能存在量化误差,造成原图某些灰度信息丢失,而且处理后的图像因概率密度的不均匀性而出现“过暗或过亮”现象。为解决上述问题,Schatz提出AHE算法[10],与HE算法的全局引入不同,AHE算法将直方图均衡化引入局部分析中来改变局部灰度分布,使得局部信息得到明显改善,但是该算法忽略了局部以外其他区域的像素,造成局部与整体脱节;因此会过大放大区域噪声,且均匀化后会出现明显的块块效应。因此,Cromartie等[11]提出CLAHE算法,它同时考虑框选区域内、外的直方图,这更加符合人的视觉特性,并通过限幅使局部区域对比度过度增强以及区域噪声放大的问题得到有效改善。将超过限值的部分进行裁剪,然后把该部分均分到每个灰度级,限幅裁剪、重新分配的过程见图3。
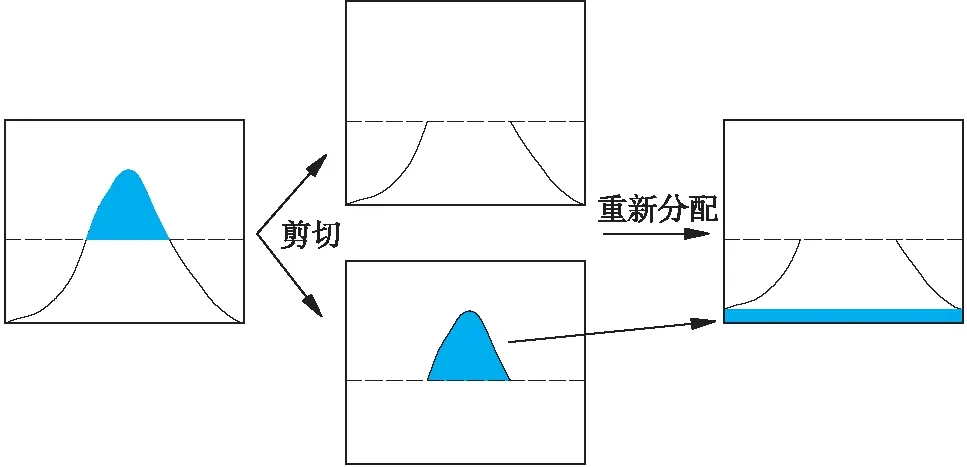
图3 CLAHE直方图限定过程
CLAHE算法其基本流程如下[12]:
1)将原图像划分为连续、非重叠的k×k个大小为m×n的固定子块,k可取值为4、8、16和32等,m,n代表子块的行数和列数,两者共同决定图像的细节增强程度。
2)将分割所得的全部子块进行直方图均衡化,并求其灰度变换函数。
3)计算受限值,设NCR-X、NCR-Y分别为子区域x、y方向的像素个数,Ngray为该区域的灰度级数,按以下可计算出子区域像素个数均分到每个灰度级的平均值
(6)
限定每个灰度级包含像素数不允许超过平均值Naver的Nclip,则实际剪切极限值NCL为
NCL=Nclip·Naver
(7)
4)剪切每个子块的灰度直方图超过限值NCL的部分(图阴影部分),将被剪切下来的像素数目重新均分到直方图的各灰度级中,设阴影部分的像素总数为Nsumclip,由此均分到每个灰度级的像素数
(8)
结合图,可将裁剪、重新分配过程用如下算法表示:
ifH(i)>HCL,H(i)=NCL;elseifH(i)+Hacq≥NCL,
H(i)=NCL;elseH(i)=H(i)+Nacq
(9)
其中,H(i)为原始区域中第i个灰度级的像素数。对剩余像素从最小灰度级开始按以上方法进行循环分配,直至超限像素个数为0为止,得到新的直方图。
5)将经过剪切得到的新直方图进行直方图均衡化。
6)线性插值过程。以每个子块中心点的灰度值为参考点,对图像中每一个像素点进行灰度线性插值。根据相邻参考点的个数,变化函数可分为4个参考点的双线性插值、2个参考点的单线性插值以及1个参考点的采用参考点所在块灰度值。以双线性插值为例,计算插值后的点灰度值。
图4中,4个参考点A(xA,yA),B(xB,yB),C(xC,yC),D(xD,yD)对应的灰度值分别为GA(i),GB(i),GC(i),GD(i),其计算点P(x,y)的插值灰度值G(i)为:
G(i)=a[bGA(i)+(1-b)GB(i)]+
(1-a)[bGD(i)+(1-b)GC(i)]
(10)
其中:a=(y-yB)/(yC-yB),b=(x-xA)/(xB-yA),且有xA=xD,xB=xC;yA=yB,yC=yD。
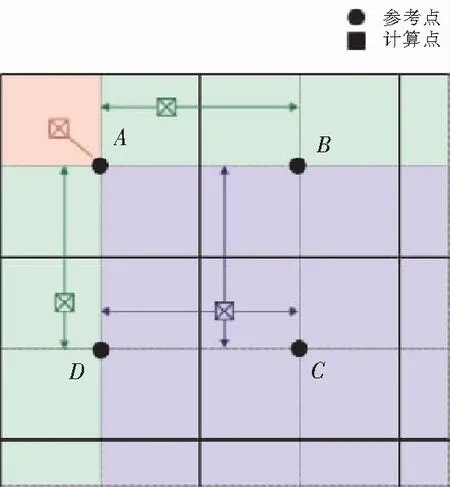
图4 线性插值示意图
2 仿真与实验
2.1 试验系统和脱空样本
试验采用主动式加热,所用的热激励装置为温度模拟试验箱,其光源为4个功率相同的碘钨灯。试验制作2个钢管混凝土试件,分别布设不同形式的脱空。试件1钢管壁内粘贴一处面积较大的聚乙烯塑料泡沫,试件2钢管壁内粘贴3处面积相同但厚度不同的聚乙烯塑料泡沫,试件详细信息见表1。
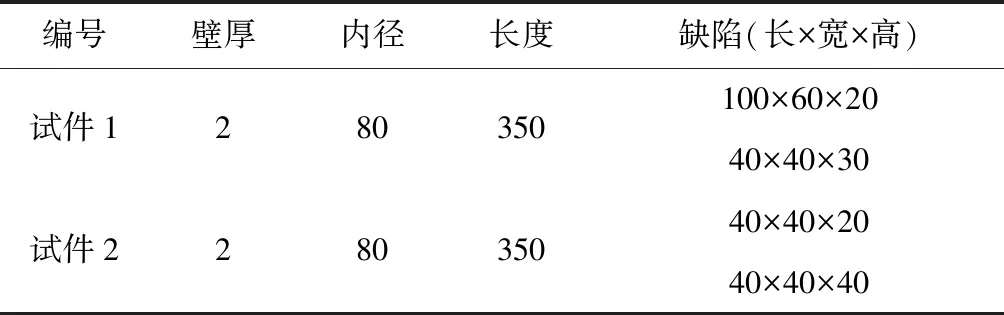
表1 试件具体布置表 mm
2.2 试验过程
开始试验之前,需同时开启4个碘钨灯对温度模拟试验箱进行2 min预热,预热完毕后关闭碘钨灯电源。然后开始调整红外热像仪以及钢管混凝土的位置,使得钢管混凝土试件摆放到碘钨灯正下方,同时红外热像仪采集区域也正对钢管混凝土试件的正上方。调整好后,同时开启碘钨灯电源以及红外热像仪采集按钮,进行采集。开启碘钨灯电源3 min后,关闭电源,再收集钢管混凝土试件降温至常温的过程。试验过程图见图5。
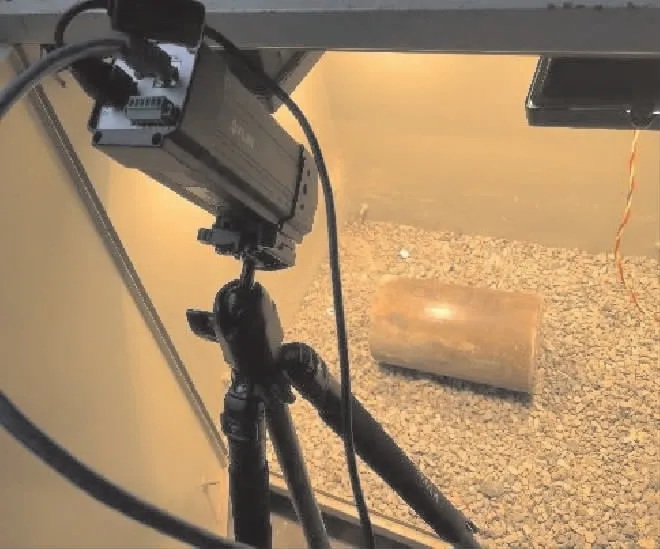
图5 加热以及采集视频过程
2.3 试验结果
用该算法将采集的视频进行处理,并将增强前、后热图进行对比。图6比较了试件1在不同加热时间下增强前后的结果,图7比较了试件2在不同加热时间下处理前后的结果。
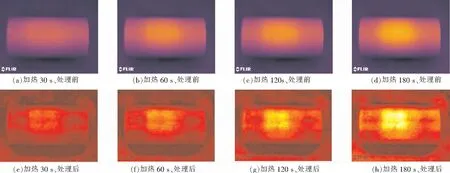
图6 试件1在不同加热时间下处理前后对比
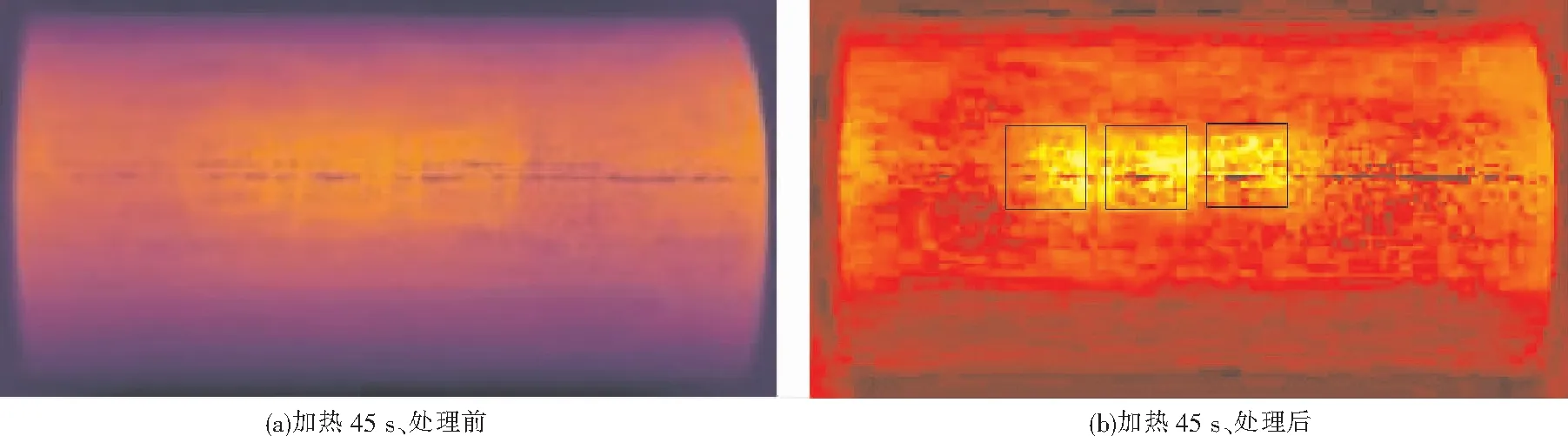
图7 试件2加热45 s处理前后对比
由图6可知,随着加热时间的增加,脱空与非脱空区域外表温差越来越明显,经过处理后,图像的缺陷与非缺陷区域对比度增强,能更加清晰地识别脱空位置;同时,处理前,由于边缘效应的存在,图像显示的缺陷形状(椭圆形)与实际形状(矩形)存在一定偏差,处理后,边缘信息细节得到很大程度的加强,能够基本反映出缺陷的实际形状。
由图7可知,对试件2加热45 s,处理前很难识别布设的3处脱空的位置;处理后,能够较清晰地识别出3处脱空的大概位置,且能初步标定脱空的形状和大小。
2.4 性能评价
结合主观性能评价与客观性能评价,文中采用的客观质量评价标准为:均值、标准差和信息熵,其中,图像均值可以用来衡量图像的平均亮度;标准差可以体现图像的局部对比度;信息熵则用来衡量图像信息的丰富程度。表2是对图6的客观评价参量的统计。
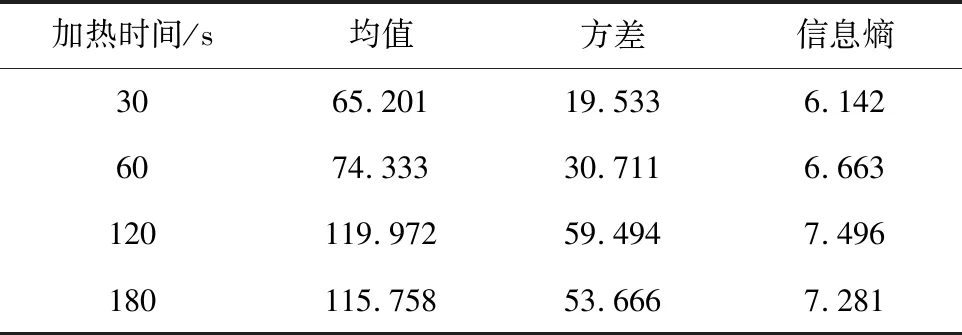
表2 不同加热时间对图像增强的客观评价统计参量
从主观角度对图像增强效果进行评价,发现CLAHE算法处理后的图像所包含的图像信息更加丰富,能够更好刻画出缺陷的形状,而且增强后的图像颜色明亮,且反映的缺陷形状更接近真实缺陷形状;从客观角度对图像增强效果进行评价,处理后的图像可提前发现脱空的位置与形状,从而可缩短加热时间,另外,当加热时间为120 s时,图像处理效果最佳。
3 结论
针对红外热成像检测钢管混凝土脱空时,热图本身存在分辨率低、缺陷与非缺陷区域对比度不够高的问题,本文提出基于CLAHE的钢管混凝土脱空检测热像图增强方法,试验结果表明:
1)红外热像图通过本文提出的方法处理后,其缺陷区域与非缺陷区域之间的对比度明显提高,能够清晰识别出缺陷的位置以及形状;
2)红外热像图通过图像增强处理后,可提前发现缺陷的位置,从而缩短了外界热源的激励时间;
3)通过试验,可寻找到合适的外界热源的激励时间,使得图像处理的效果达到最佳。
