舰载无人直升机舰面自动起降控制律设计
2019-09-11刘诗超
刘诗超,邓 静
(1.海军装备部驻武汉地区军事代表局驻南昌地区军事代表室,江西 南昌 330001;2.中国直升机设计研究所,江西 景德镇 333001)
0 引言
舰载无人直升机具有配置方便、使用灵活、特别适合舰面起降等特点,具有其它无人飞行器无可比拟的优势,特别适宜于现代海军作战的需要。通过配装小型雷达、光电吊舱、目标指示器、中继制导、电子战等设备,可大幅度提高舰艇在海战中对高风险目标的突防侦察能力、通信导航中继能力、电子战对抗能力、联合作战能力。可以说,舰载无人直升机装备的发展已成为未来海上综合作战能力形成、提高和发挥的重要组成部分。为此,世界各军事强国无不对舰载无人直升机的研制给予极大的重视。虽然近年来我国在直升机的科研方面取得了不少成果,但应该看到,在无人直升机,特别是舰载无人直升机舰面起降控制律设计技术方面没有开展系统、深入的研究,基本上还处于起步阶段,与国外先进水平相比还存在较大的差距,亟待跟上世界舰载无人直升机的研制步伐。为此,本文对舰载无人直升机舰面自动起降控制律设计技术进行研究,掌握舰载无人直升机舰面自动起降控制律设计方法,为未来的舰载无人直升机的型号研制打下技术基础,提高我国舰载无人直升机开发能力。
1 舰面自动起降控制要求
舰载无人直升机是一个非线性、强耦合系统,舰面自动起降过程的主控通道为总距通道,同时由于总距的变化会引起其它通道的耦合响应,在设计总距通道的控制策略时必须考虑其他通道的耦合影响[1]。舰面自动起降过程中,无人直升机的状态是在一个很小的范围内变化,考虑工程实际操作的可行性,在设计舰面自动起降过程控制时只考虑操纵耦合,忽略状态耦合的影响。
控制系统设计过程中将舰载无人直升机分为五个控制通道,分别为纵向通道、横向通道、航向通道、高度通道和发动机通道。为了保证自动起降过程的安全,垂直起降过程对各通道的控制效果都提出了较高的要求。
2 舰面自动起降控制方案
2.1 舰面自动起飞控制方案
由于舰面运动的复杂性,舰载无人直升机在舰面起飞的过程较为困难,需要判断可以起飞的时机。通常甲板运动分为平移与转动两种,甲板平移时舰载无人直升机起飞会叠加平移运动,但因甲板的平移速度不大,对其影响不大。无人直升机起飞后,通过带速度反馈的位置控制,可消除起飞后的平移速度。但是,应尽量避免甲板转动时舰载无人直升机起飞,因为这会严重影响无人直升机的稳定性,危及起飞安全。在复杂海浪运动与大风环境下,甲板的转动通常可以分解为各种频率与振幅的正弦波叠加,可通过判断,于甲板在振荡零位时起飞,来尽可能地缓解甲板转动对舰载无人直升机自动起飞的不利影响[2]。
舰载无人直升机舰面起飞时,航向通道闭环接通航向保持功能,即保持当前的机头航向;纵向与横向为姿态保持控制与位置保持控制,即保持舰载无人直升机当前的姿态与位置,忽略舰体运动造成的位置偏移;高度通道为爬升速率控制,在舰载无人直升机爬升到设定的安全高度后,高度通道切换为高度保持控制。
2.2 舰面自动降落控制方案
相对于自动起飞过程,无人直升机自动降落过程更为困难。由于舰面运动的复杂性,直升机在舰面降落时需要判断可以降落的时机。根据甲板的平移与转动运动,直升机在选定降落点上方应跟随甲板运动,以达到直升机与降落点之间的相对静止;同时通过判断,在甲板振荡的短暂停止时降落,来尽可能地缓解甲板转动对无人直升机自动降落的不利影响。
舰载无人直升机整个自动降落过程主要可划分为着舰航线切入、降落窗口捕获、下滑段、过渡段、跟进悬停段和最后的降落段等组成,若在下滑段或过渡段判断不宜降落,则需要进行复飞,重新降落。自动降落的基本原则是先设计一个理想的降落轨迹,然后导引和控制无人直升机,使其跟踪理想轨迹降落。
捕捉到舰船运动的平静期,并在舰船运动到最上方或最下方时,控制无人直升机至降落点上空稍加停顿,即刻进行垂直下降。高度通道接通下降速度控制,当直升机距离甲板一定高度时降低总距,减小油门,直升机由于旋翼拉力减小自动下降,当触地开关动作后,控制系统切断各通道控制,关闭发动机,启动系留装置。
3 舰面自动起降控制律设计
3.1 纵向通道控制律设计
3.1.1 纵向通道增稳控制律设计
纵向通道增稳控制结构如图1所示,控制律形式为:

(1)
式中K1及K2分别为俯仰角速率与滤波器反馈系数;τ为滤波器时间常数。

图1 纵向通道增稳控制结构图
3.1.2 俯仰角控制律设计
加入强积分后的俯仰角控制结构如图2所示,控制律形式为:
引入的滚转角交叉项用于实现纵/横向解耦。
3.1.3 纵向位置控制律设计
纵向位置控制通过纵向通道实现,直升机低头时向前加速,直升机抬头时减速,因此直升机通过纵向姿态的改变实现纵向位置控制。纵向位置控制的控制律形式为:

(3)
式中Xcmd为纵向位置指令,KX,KV,IX分别为比例、微分和积分控制律系数。图3为无人直升机纵向位置控制结构图,前飞速度反馈作为控制律的阻尼,“-1”表示直升机低头才前飞。

图2 俯仰角控制律结构图

图3 纵向位置控制律结构图
3.2 横向通道控制律设计
3.2.1 横向通道增稳控制律设计
横向通道增稳控制律形式为:

(4)
控制结构如图4所示。

图4 横向通道增稳控制结构图
3.2.2 滚转角控制律设计
加入强积分后的俯仰角控制结构如图5所示,控制律形式为:

(5)
引入的俯仰角交叉项用于实现纵/横向解耦。
3.2.3 横向位置控制律设计
横侧向位置控制通过滚转通道实现,直升机右滚时向右侧飞,直升机左滚时向左侧飞,因此直升机通过滚转姿态改变实现横向位置控制。横向位置控制的控制律形式为:

(6)
式中Ycmd为横向位置指令,KY,KV,IY分别为比例、微分和积分控制律系数。图6为无人直升机横向位置控制结构图,横飞速度反馈作为控制律的阻尼,积分通道限幅器的幅值为±2°。

图5 滚转角控制律结构图

图6 横向位置控制律结构图
3.3 航向通道控制律设计
为了满足航向控制要求,航向控制采用反馈加前馈的复合控制。反馈控制为PID控制,前馈补偿控制分为两部分:旋翼反扭矩前馈补偿与偏航角速率前馈补偿。反馈控制器主要用于实现平衡点附近的稳定与跟踪控制;前馈补偿主要为了提高航向控制的响应速度,对旋翼负载变化的适应能力和航向跟踪精度。
采用反馈加前馈补偿的航向控制律为:
KR(R-Rg)+δp(δc)+δp(Rg)
(7)
航向控制结构如图7所示。

图7 航向控制结构图
3.4 总距通道控制律设计
3.4.1 自动起飞总距通道控制律
控制律结构如图8所示。

图8 自动起飞控制律结构图
控制律形式为:
当H=0时:
col_law=col_qk1
(8)
当H>0时:
col_law=col_trim+k_dh*(DH-DH_G)
(9)
当H>H1后:
col_law=col_trim+k_dh*
(DH-DH_G)+k_h*(H-H_G)
(10)
当H=H2时:
col_law=col_trim+k_dh*
DH+k_h*(H-H_trim)
(11)
其中H1,H2为某指定高度。
3.4.2 自动降落总距通道控制律设计
控制律结构如图9所示。

图9 自动降落控制律结构图
控制律形式为:
当H=H1时:
col_law=col_trim+k_dh*
DH+k_h*(H-H_trim)
(12)
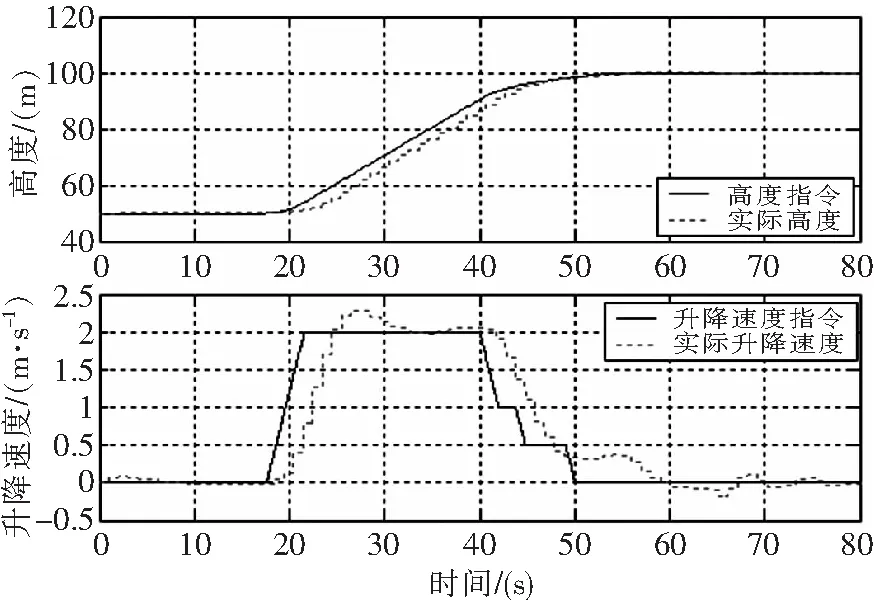
当H2 col_law=col_trim+k_dh*(DH-1)+k_h*H (13) 当H3 col_law=col_trim+k_dh* (DH-0.5)+k-h*H (14) 当H col_law=col_trim-col_qk2 (15) 其中H1,H2,H3为某指定高度。 为了验证舰面起降控制律的正确性和有效性,基于悬停/小速度段控制技术的研究成果,以某型无人直升机为样例机,实现了在风速小于5m/s条件下的无人直升机的自动起飞和自动降落。详细的仿真数据曲线如图10-图15所示。 图10 自动起降对应高度和升降速度的响应曲线图 图11 自动起降位置保持响应图 图12 自动起降姿态响应图 图13 自动起降的发动机匹配控制图 图14 自动起飞仿真曲线 仿真曲线表明,样例无人直升机在起飞阶段,爬升速率约为2m/s;在降落阶段,其下降速率约为1m/s。无人直升机在整个起降过程平稳,纵横向位置偏差均小于5m,姿态角变化小于2°,发动机转速偏差小于2%,控制精度满足指标要求。 图15 自动降落仿真曲线 对舰载无人直升机自动起降控制律的设计和仿真分析表明采用本文的控制方法是可行、合理的。该控制律设计具有构建方便、参数整定简单等特征,是一种值得在实际工程应用中推广的设计方法。4 仿真验证





5 结论
