基于萤火虫算法的自行式房车内部布置优化
2019-08-29路艳玲徐家川张裕晨
路艳玲,徐家川,张裕晨,孙 凯
(1.山东理工大学 交通与车辆工程学院, 山东 淄博 255049; 2.莱芜职业技术学院 机械与汽车工程系,山东 莱芜 271100)
房车空间布置后质心会发生变化,从而影响整车的操纵稳定性与制动性。质心前移,到后轴的距离增加,有利于减小过多转向量,甚至变成不足转向,操纵稳定性变好,但后轴容易先抱死造成侧滑漂移现象;质心后移,到后轴的距离减小,前轴有先抱死的趋势,制动性能变好,但操纵稳定性变差;质心垂直上移,操纵稳定性与制动性均变差,容易发生侧翻、前后翻[1]。质心过多的前移、后移或者上移都会对整车性能造成很大的影响,因此要对房车空间布置进行优化,以提高自行式房车的行驶稳定性。
对复杂的寻找最优目标函数的求解算法主要有三种:遗传算法、群智能优化算法以及新兴的萤火虫算法。遗传算法发展较早,其原理是通过模拟自然进化过程搜索最优解,存在收敛速度慢和早熟等缺点,而蚁群、粒子群等群智能优化算法虽然提高了收敛速度,但自身容易陷入局部最优的缺陷[2]。萤火虫算法作为一种新兴的优化算法,自2008年提出以来,在很多领域得到应用,例如在公差分配[3-4]、装配序列[5]、电动汽车运行成本[6]等领域。应用表明,萤火虫算法收敛性、稳定性和效率方面都优于其他算法。故本文将萤火虫算法应用于房车空间布置的优化计算中。
1 约束条件
不同的布置方案必然会引起整车轴荷分布的变化,为了保证整车的行驶稳定性,前、后轴荷分布及横向稳定系数必须控制在一定范围内,因此以轴荷与横向稳定系数为限制,建立约束条件。
1.1 轴荷分布
假设整车总质量为M,整备质量为M0,轴距为L,装载前前、后轴荷为F1、F2,整车尺寸为:长×宽×高=C×W×H,其参数关系如图1所示。以前轴与车宽对称面的交点为原点,车前进行驶方向为X方向,车宽方向为Y方向,车高方向为Z方向,建立坐标系。

图1 装载前房车参数Fig.1 RV parameters before loading
图1中:O为空载质心位置;G为装载前整车重力;hg为空载质心高度;L为轴距;a为空载质心到前轴中心的距离;b为空载质心到后轴中心的距离;F1、F2分别为装载前前、后轴荷。
1)整车质量计算
(1)
式中:M为整车总质量,包括整备质量、装载质量;Mi为内部设备件质量;整备质量为M0。
2)装载后质心位置计算
(2)
式中:x、hg为装载后整车质心在X、Z方向上的位置;xi、hi为各部件质心在X、Z方向上的位置。
3)后轴荷分布约束
轴荷分配的主要设计原则,是在满足车辆主要性能及结构布置需要的前提下,保证车辆的各个轮胎受力均匀[7]。设计时要满足房车前后轴荷许用范围,因此将后轴轴荷分布作为约束。

(3)
式中:L为整车轴距;M后为整车后轴轴荷;Xi=|xi-L|,为第i个部件质心到后轴的距离。
自行式房车底盘为微型载货汽车的底盘,驱动形式为4×2,本文以前置后驱的货车底盘为研究对象,其前后轴荷分布见表1[8]。
表1 各类汽车轴荷分配
Tab.1 Various types of axle load

车型空载满载前轴后轴前轴后轴发动机FF发动机FR发动机RR56%~66%51%~56%38%~50%34%~44%44%~49%50%~62%47%~60%45%~50%40%~46%40%~53%50%~55%54%~60%
由表1可知,满载时后轴轴荷分布范围为:M·50%≤M后≤M·55%,即
(4)
1.2 整车横向稳定性约束

(5)
式中:T横为整车横向稳定参数;B为房车轮距;hi为空间设备质心高度位置。
将计算得出的横向稳定参数与附着系数比较,如果大于附着系数,则说明稳定性好,进而校核房车内部空间布置合理。汽车在干燥的沥青路上的附着系数是0.7[9],即令横向稳定参数大于0.7为约束。
综上,建立约束条件为
(6)
2 空间优化目标函数
空间布置完成后,会在X、Y、Z三个方向产生载荷变化。X方向载荷分布不均会引起前后翻,Y方向的会引起车辆的侧翻,Z方向的会引起质心高度的变化,车辆行驶稳定性差。本文主要考虑X、Z方向的载荷分布,建立相应的目标函数。
X方向质心变化函数为
(7)
Z方向质心高度变化函数为
(8)
式中,X、H分别表示整车质心在X、Z方向的位置函数;x原车、h原车表示改装前底盘质心在X、Z方向的位置;Mi为第i个部件的质量;n为空间主要设备个数;xi为第i个部件质心在x方向的位置;hi为第i个部件质心高度位置。
由以上分析可以看出,目标函数X、H越小,即布置后质心位置较原车质心移动越小,对整车行驶稳定性影响越小。
3 萤火虫算法
3.1 算法原理
萤火虫算法(Firely Algorithm, FA)[10-11]由英国学者Yang提出,算法源自萤火虫在自然界中的信息传递行为。首先求解空间中随机分布的N个萤火虫,每个萤火虫都有自己的感知搜索半径,在搜索半径内搜索最亮萤火虫并向其移动;然后更新搜索半径与吸引度,继续搜索移动,直到达到迭代次数,萤火虫将会聚集在它能感知到的最亮萤火虫周围或最亮萤火虫的点上,这些点的位置就是优化函数的最优解。
3.2 算法流程
算法主要概括为四个阶段:更新亮度、更新搜索半径、寻找最亮个体、更新位置,具体流程如图2所示。
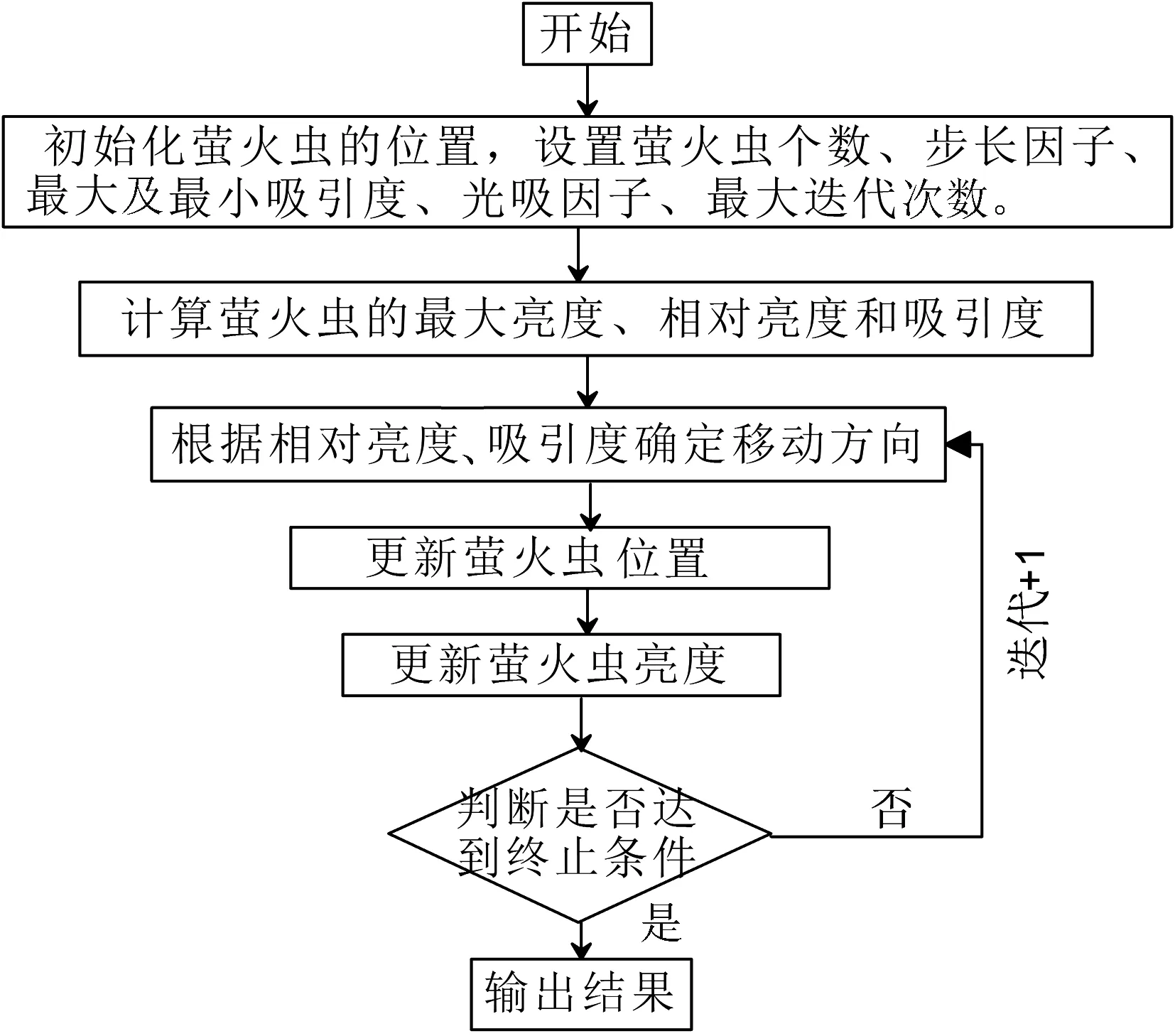
图2 萤火虫算法流程Fig.2 Flow of firefly algorithm
具体算法的步骤如下:
1)初始化萤火虫的位置,设置萤火虫个数、步长因子、最大及最小吸引度、光吸因子、最大迭代次数;
2)计算萤火虫的最大亮度、相对亮度和吸引度;
(1)发光强度为
I(r)=I0e
(9)
式中:I0表示萤火虫间距为零时的亮度;r表示两萤火虫之间的距离;表示光吸收因子。
(2)吸引强度
萤火虫间的吸引强度随距离的减小而增大,计算公式为
B(r)=β0e
(10)
式中:β0表示间距为0时的吸引强度,此时吸引强度最大。
3)进入移动阶段,选出符合条件的萤火虫;
在决策域内寻找最亮个体并向其移动,其移动距离为
(11)
式中:xi、xj表示两萤火虫;rij表示两萤火虫之间距离;D表示空间维度;xik、xjk分别表示第i、j个体在K维空间的位置。
4)更新萤火虫的位置;
(12)
5)更新萤火虫的亮度;
6)选出目标函数值较大的萤火虫,判断是否满足结束条件,如果满足则结束循环,否则转第3步。
4 优化模型应用实例
以一款自行式房车为例,整车总质量M为3 060 kg,整备质量M0为2 260 kg,轴距L为3 400 mm,装载前前、后轴荷F1、F2分别为890 kg、1 370 kg,车厢尺寸为:长×宽×高=25 00×2 000×2 000,初始空间布置如图3、图4所示,内部设备及其质量见表2。

图3 空间布置俯视图Fig.3 Vertical view of the space layout
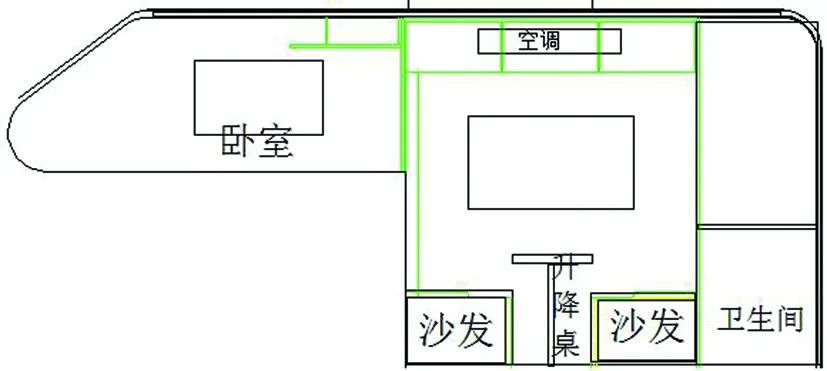
图4 空间布置左视图Fig.4 Left view of the space layout
4.1 约束条件
已知本车整车质量为3 060 kg,轴距为3 400 mm,前轮轮距为1 550 mm,根据后轴轴荷与横向稳定系数建立约束条件。
(13)
式中:Xi=xi-3 400,具体部件的Mi见表2。
4.2 优化目标函数
房车轴距为3 400 mm,改装前底盘质心在X方向为2 061 mm,在Z方向为950 mm,代入式(7)、式(8)得到该布置方案的优化目标函数。
表2 房车空间设备及其质量
Tab.2 RV space equipment and its quality

名称部件质量/kgX方向位置/mmX方向的质量矩Z方向位置/mmZ方向的质量矩1电磁炉10x110x1h110h12油烟机24x124x1h224h23冰箱、冰箱柜54x254x2h354h34电池、充电器120x3120x3h4120h45厨房板45x445x4h545h56升降桌80x580x5h680h67吊柜100x6100x6h7100h78卫生间板70x770x7h870h89马桶54x854x8h954h910洗手台35x935x9h1035h1011储物柜26x1026x10h1126h1112沙发130x1130x11h1230h1213沙发230x1230x12h1230h1214床板44x1344x13h1344h1315空调38x1438x14h1438h1416污水箱、净水箱40x1540x15h1540h1517底盘2 2602 0614 657 8609502 147 000合计3 060∑15i=1Mi·xi∑15i=1Mihi
(14)
4.3 优化计算结果
根据需要设置萤火虫算法中的相关参数:初始步长α=0.4,初始吸引度β0=1.0,最小吸引度βmin=0.2,光吸系数γ=0.1,萤火虫种群数为10,最大迭代次数为400。根据式(9)—式(12),用MATLAB编写萤火虫算法代码,进行优化计算。
1)X方向质心函数优化结果
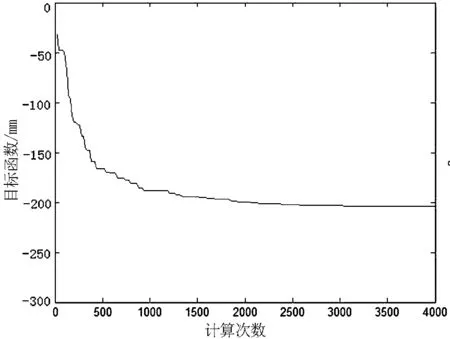
图5 X方向质心计算结果Fig.5 Calculation results of centroid change in X direction
X方向质心计算结果如图5所示。由图5可知,随着迭代次数的增加,目标函数在迭代2 000次后趋于平稳,目标函数稳定在-212.4 mm附近,装载后的质心在X方向比装载前向后轴方向移动最小为212.4 mm。此时各设备在X方向的位置分别为3 547.5 mm、4 799.6 mm、3 100.0 mm、3 399.1 mm、3 600.0 mm、3 400.0 mm、4 698.0 mm、4 800.0 mm、4 707.5 mm、4 998.7 mm、3 015.4 mm、4 065.6 mm、2 000.0 mm、3 499.6 mm、3 500.0 mm。
2)Z方向质心函数优化结果
Z方向质心计算结果如图6所示。由图6可知,随着迭代次数的增加,目标函数在迭代2 000次后趋于平稳,目标函数稳定在237.0 mm附近,装载后的质心在Z方向比装载前向上移动最小为237.0 mm。此时各设备在Z方向的位置分别为1 184.9 mm、1 948.5 mm、1 000.0 mm、700.0 mm、1 500.0 mm、900.0 mm、2 300.2 mm、1 500.0 mm、799.8 mm、999.9 mm、1 200.0 mm、742.3 mm、1 583.9 mm、2 298.7 mm、763.4 mm。

图6 Z方向质心计算结果Fig.6 Calculation results of centroid change in Z direction
4.4 优化后的行驶稳定性分析
将优化前后的家居设备位置代入式(2)计算整车质心位置,根据计算结果分析优化前后整车的行驶稳定性变化。
1)水平方向
以X方向质心变化最小为优化目标,装载后质心向后轴方向移动,前轮有先抱死的趋势,房车在平稳路面行驶时制动性好;但质心后移减小不足转向会使整车操纵稳定性降低。优化前的质心位置在水平方向为2 466 mm,优化后的为2 298 mm,后移量减小,操纵稳定性提高,达到该布置方案的理想性能。
2)垂直方向
装载后质心向上移动,以Z方向质心变化最小为优化目标,优化前的质心位置在高度方向为1 250 mm,优化后的为1 187 mm,上移量减小,整车操纵稳定性与侧倾稳定性提高。
综上,该空间布置优化模型提高了整车行驶稳定性,将布置后的整车行驶稳定性的影响降到最低。
5 结束语
本文主要针对自行式房车内部不同的布置方案引起的行驶稳定性变化问题,建立了整车质心在X、Z方向变化最小优化目标函数,结合萤火虫算法对目标函数求解计算,得到该布置方案设备质心理想位置,提高了房车的行驶稳定性,并实例验证了该优化模型的有效性。
