基于改进蚁狮算法的MMC控制器PI参数优化研究
2019-08-23田录林陈倩雯张沛文王伟博巨思远
田录林,陈倩雯,周 萌,张沛文,王伟博,巨思远
(1. 西安理工大学,陕西 西安 710048; 2. 工商银行陕西分行反洗钱中心,陕西 西安 715111)
0 引 言
模块化多电平换流器(Modular Multilevel Converter,MMC)作为电压源型换流器的一种新型拓扑结构,具有实现功率独立可调、无需额外的滤波装置、占地面积小和结构模块化等优点,目前已在国内外实际工程中投入运行[1]。多模块的拓扑结构和多环节的控制策略,在仿真研究和工程实践中需要考虑复杂的协调控制,因而对控制系统的性能要求非常高[2]。比例积分(PI)控制因调节快速、结构简单等优点,被广泛用于 MMC 的控制环节设计。 PI 控制参数的选取对系统性能有重大影响,随着研究发展,智能优化算法越来越多地被应用于 PI 控制参数的优化,如粒子群算法(Particle Swarm Optimization, PSO)等[3]。蚁狮优化算法(AntLion Optimizer, ALO)是 2015 年新提出的仿生算法,通过模拟蚂蚁围绕蚁狮游走的生物行为,实现对解空间的全局搜索,通过向精英蚁狮学习的机制保证种群的多样性。经工程实践验证, ALO 算法具有调节参数少、求解精度高等优点。文献 [4] 提出一种基于 Fuch 映射的混沌侦查机制的改进 ALO 算法,减少了初始适应值较差个体对种群的误导,但并未改善算法的收敛速度。文献 [5] 针对原始 ALO 算法搜索半径呈跳跃式,搜索更偏向于精英,易陷入局部最优;引入动态搜索和寻优半径连续收缩机制改进 ALO 算法,使改进 ALO 算法具有了更好的收敛速度,但降低了对已找到的最优解充分利用的能力。文献 [6] 通过在建模中引入漩涡收敛方式,增强了原算法对最优解的利用能力,但忽略了保持种群进化的多样性,使算法陷入了局部最优解。
本文提出一种改进蚁狮算法。引入 Tent 映射的混沌思想,利用混沌的遍历性细化算法中优化变量的搜索空间,保证初始化粒子具有更好的多样性,克服原蚁狮算法存在的收敛速度慢、易陷入局部最优等缺陷。同时,引入精英竞争策略,充分利用已经找到的最优解,帮助种群快速选定更优区域,大幅减少计算量,也保证了算法的收敛速度。以反应系统调节品质的时间乘绝对误差积分 ITAE 值作为目标函数,将改进算法用于MMC 控制环节的 PI 参数整定,与其他智能算法结果作对比,证明改进后算法存在优越性。此改进算法对选取较优 PI控制参数、提高控制系统性能有一定的实际参考意义。
1 模块化多电平换流器拓扑及工作原理
三相 MMC 拓扑图如图 1 所示,每相由上、下桥构成,共6个桥臂,每个桥臂由N个子模块和1个桥臂电感L串联而成。桥臂电感L可以抑制直流侧故障时产生的短路电流和桥臂间的交流环流[7]。

图1 MMC拓扑图
当T1加开通信号,T2加关断信号,MMC为投入状态;当T1加关断信号,T2加开通信号,MMC为旁路状态;当T1和T2都加关断信号,此时处于闭锁状态。MMC正常工作需要每相投入n个子模块,通过调整n个子模块在上下桥臂的分布实现不同电平的输出[8]。图2为MMC简化等效电路。
基于图2的MMC等效电路,可得到MMC交流三相电路在abc坐标系下的数学模型:
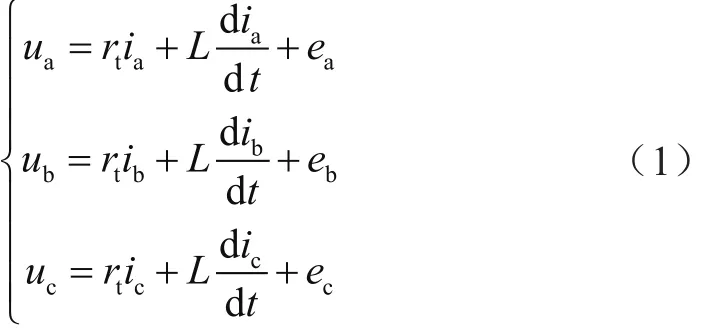
其中,L=lt+ls/2,ea、eb、ec为MMC的三相输出电压。
对式(1)进行dq轴坐标变换,得到dq轴下的MMC数学模型为:
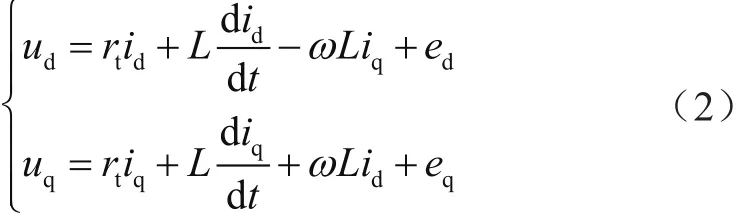
其中,ud、uq为接入点电压在dq轴坐标系下的d轴和q轴分量;ed、eq为MMC可控输出电压的d轴和q轴分量;id、iq为经过换流变压器流入MMC的电流dq轴分量;ω为交流系统角频率。由式(2)可知,dq轴电压方程存在电流耦合,ωLiq、ωLid为交叉耦合项[9]。
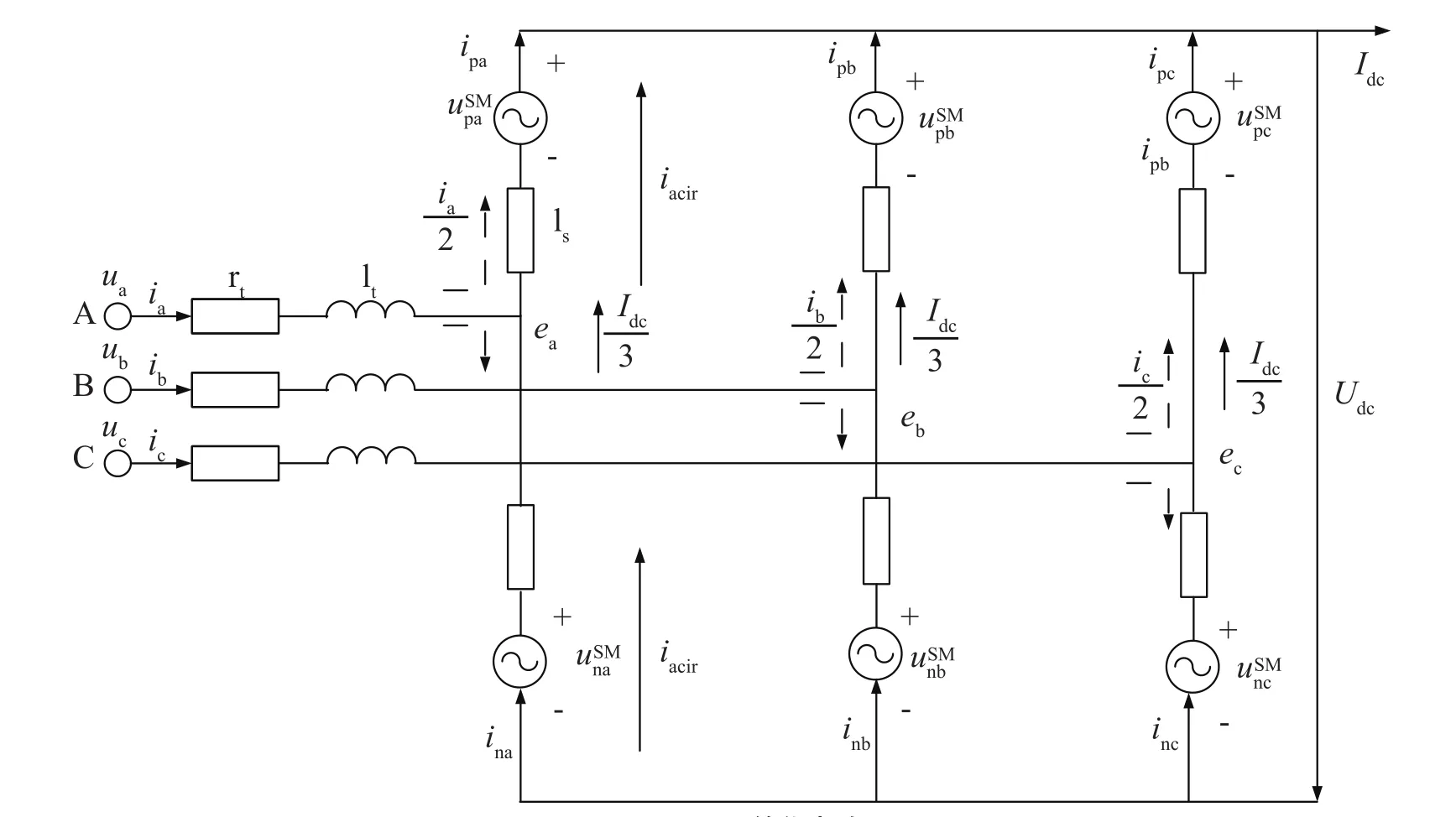
图2 MMC简化电路
2 MMC控制策略
MMC控制系统常采用直接电流控制,控制器为双闭环控制方式,即外环控制和内环控制,其控制框图如图3所示。
本文使用的外环控制方式为定直流电压、无功功率控制,内环采用电流控制。外环控制根据无功功率和直流电压的参考值,计算内环dq轴电流参考值;内环控制使dq轴电流快速跟踪其参考值。
2.1 内环控制
引入虚拟控制量,即:

图3 MMC双闭环控制框图

依式(2)可知:
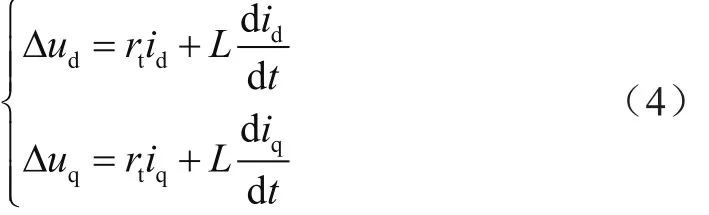
将电流偏差值作为控制器的输入,Δud和Δuq作为控制器的输出,则可得:
其中,idref、iqref分别为dq轴电流的参考值,通过引入虚拟控制量实现id、iq的解耦,减少dq轴之间的影响。
2.2 外环控制
外环控制环节通过对直流电压、无功功率指令控制,生成内环需要的参考电流值idref和iqref:
其中,udcref为MMC直流电压udc的参考值;Qref为交流侧输入的无功功率Q的参考值。
当外环为直流电压控制回路运行时,若直流电压低于其参考值,PI控制器增大d轴电流分量参考值,通过对电容充电升高直流电压;若直流电压高于其参考值,PI控制器减小d轴电流分量参考值,对电容放电降低直流电压。在换流器容量范围内,通过调节能量平衡,直流电压被控制在参考值附近。最后,将计算的d轴和q轴电流参考值发给内环控制器。
3 蚁狮算法及其改进算法
3.1 原始蚁狮算法
蚁狮算法源自于模拟蚁狮捕猎蚂蚁的行为。蚁狮即问题的解,捕获适应度更高的蚂蚁即更新并保存更优解[10]。
3.1.1 蚂蚁随机游走
蚂蚁随机游走过程即视作各搜索代理搜寻可行域的过程:

其中,X(t)是蚂蚁随机游走步数集,cumsum是蚂蚁游走位置累积和,t为游走步数,tmax是随机最大游走步数(最大迭代次数)。r(t)为自定义随机函数,rand是[0,1]上均匀分布的随机数。
为了保证蚂蚁随机游走在可行域的范围内不越界,需要进行归一化处理:

其中,ai和bi为第i个变量随机游走的最小值和最大值;和为第i个变量在第t代的最小值和最大值。
3.1.2 蚂蚁爬入陷阱
蚁狮的位置影响蚂蚁游走的区域边界范围:

其中,Antlionjt为第j只蚂蚁选择的相应的蚁狮在第t代的位置;dt为所有变量在第t代的最大值;ct为所有变量在第t代的最小值。
3.1.3 蚁狮捕食
当蚂蚁落入陷阱蚁狮会扬沙,可通过急剧减小蚂蚁的游走范围来阻止蚂蚁逃脱,即随着迭代次数的增加,上界和下界减小。

其中,I=10ωt/T,ω是一个由t和T定义的随迭代次数增大的常数,t为当前迭代次数,T为最大迭代次数,当t<0.1T时,I=1。
而当有蚂蚁适应度大于蚁狮的适应度值时,认为该蚂蚁被蚁狮捕获,需根据蚂蚁位置更新蚁狮位置:

3.1.4 精英策略
精英蚁狮是每代适应度最高的蚁狮。第t次迭代的第i只蚂蚁在第t+1次迭代时的位置为:

3.2 改进后的蚁狮算法
ALO算法前期,种群中存在适应度值较差的个体,即离最优解较远的解。若蚂蚁围绕这些适应度值较差的蚁狮游走,则易陷入局部最优,减弱算法的寻优效果,影响算法的收敛速度。此时,鉴于混沌具有遍历性,可利用混沌序列初始化种群位置,以保证初始化的随机性。
3.2.1 基于改进Tent映射的混沌初始化
本文采用改进Tent映射[10-13]种群位置进行初始化。Tent映射表达式为:

其中,zt代表代表混沌变量第t次迭代计算得到的值;zt取值范围在(0,1]。
对式(14)中变量zt分别赋予n个(0,1)上随机不等的初始值。由于Tent映射迭代序列中存在小周期和不稳定周期点,如0.25、0.5、0.75都将迭代到不动点,因此将Tent映射加以改进,即当zt=0.25、0.5、0.75或zt=zt-m(m=1,2,3,4)时,公式采用:

利用随机函数对序列进行扰动,跳出小周期点或不动点,使重新进入混沌状态。
上述改进后,Tent映射可得到n个运动轨迹完全不同的混沌变量为当前最优解。然后,将混沌变量的取值范围转换到相应优化变量的取值范围[14],即可得到混沌初始化后的种群初始值:

其中,aj、bj均为常数,是优化变量约束的上、下限。
3.2.2 精英竞争策略
由于上一代精英蚁狮影响下一代蚂蚁的行动,而单个精英所拥有的极值信息非常有限,因此以个别精英蚁狮为中心的区域搜索会导致算法出现早熟现象。因此,本文采取建立精英库,存储历代适应度值较佳的个体,每次迭代时从精英库中选取精英进行竞争,而不使用轮盘赌进行选择,有利于加快算法的收敛速度。设置精英个数[nmin,nmax],第t代精英个数为n(t)。迭代前期应尽可能多选择精英参与竞争,后期为减少计算量、提高计算速度与效率,应减少选择的精英数量。因此,精英个数应随着迭代次数逐次减少[14-16],计算公式为:
其中,round为取整函数,T为最大迭代次数。
每次迭代寻优完成后,更新精英库的精英,保证每次迭代中的最优n个个体,即每次迭代初始化后,先由式(17)确定精英蚁狮个数,再让蚂蚁围绕蚁狮进行游走,但游走边界公式改为:

其中,是精英库里选取的精英蚁狮。
于是,式(12)改为:

其中,是排序函数,表示提取排序后的前n个较优个体。
4 PI参数优化
由图3可知,MMC双闭环控制中共使用了4个PI控制器。为简化控制环节,假设内环2个控制器PI参数相同,取X=[kp1,ki1,kp2,ki2,kp,ki]为优化目标,时间乘绝对误差积分ITAE[17]作为目标函数:

其中,e(t)为相应控制目标参考值与实际值的误差;T为时间定值,一般取较大值让系统进入稳定。优化的目的是让优化目标的实际值更好地跟踪参考值,即希望误差e(t)最小,即求取JITAE最小值。ITAE值能反应系统调节品质,值越小,系统响应速度越快。
算法优化步骤:
(1)采用改进Tent映射混沌初始化蚂蚁和蚁狮种群;
(2)计算所有蚂蚁和蚁狮的适应度值,按适应度降序排列,选择适应度最大的蚁狮为精英蚁狮;
(3)建立精英蚁狮库,设置精英库中蚁狮个数,在精英库中选择蚁狮,让蚂蚁围绕精英蚁狮进行游走;
(4)标准化蚂蚁游走范围;
(5)利用式(18)更新蚂蚁的位置;
(6)计算所有蚂蚁的适应度值,将蚂蚁和上一代蚁狮组合,并按适应值降序排列;
(7)选择当代蚁狮种群适应度值最大的为精英蚁狮,回到步骤(1)循环至迭代次数最大。
5 仿真验证
5.1 典型目标函数性能测试
单峰值函数Rosenbrock:

多峰值函数Rastrigin:

使用式(21)和式(22)两个典型目标函数,对改进后ALO算法进行性能测试,并与原始ALO算法和PSO算法进行数据对比。测试条件:群体规模20,最大迭代次数50,维数为8。于是,改进ALO算法、原始ALO算法及PSO算法对目标函数的仿真结果数据,如表1所示。

表1 3种算法典型函数测试结果
仿真得到由改进ALO算法优化的两种测试函数最优适应度值曲线图,横坐标为迭代次数,纵坐标为最优适应度值,如图4、图5所示。
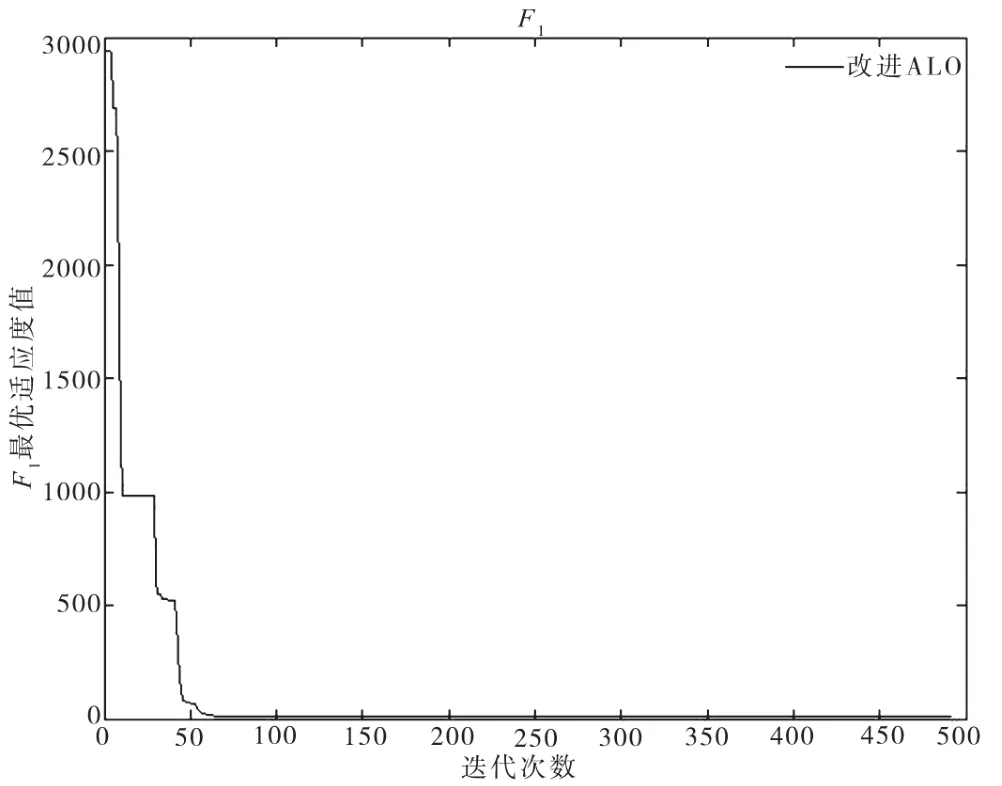
图4 F1最优适应度值曲线
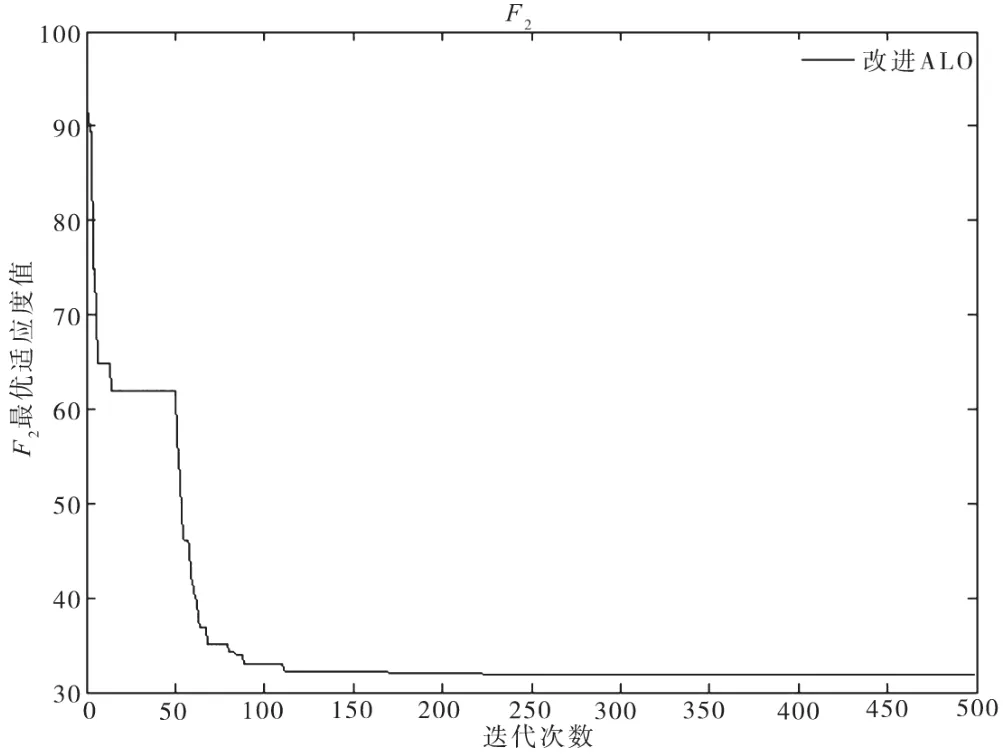
图5 F2最优适应度值曲线
5.2 MMC PI控制参数优化仿真
本文在PSCAD中搭建双端21电平MMC-HVDC系统,其拓扑结构如图6所示。采用MATLAB与PSCAD之间的数据相互调用进行参数优化过程的适应值计算和优化结果的仿真验证,仿真参数见表2。

表2 MMC-HVDC仿真参数
系统采用最近电平逼近调制策略,送端采用定直流电压和定无功功率控制。系统频率50 Hz,直流线路极间电压500 kV,输送功率400 MW,换流采用CCSC抑制方式。蚁狮种群数为20,迭代次数为20次,维数为8。
采用粒子群算法、传统蚁狮算法和改进后的蚁狮算法的仿真计算结果见图7。
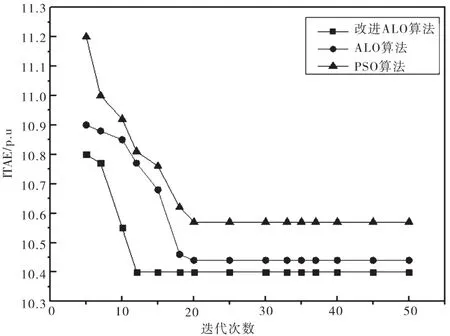
图7 ITAE指标对比图
由图7可知,PSO和ALO算法都经过约18次迭代曲线趋于收敛,而改进ALO只需要经过12次迭代曲线就开始收敛,证明改进算法收敛性能优于传统算法。同时,改进蚁狮算法优化得到的最终ITAE值小于传统蚁狮算法优化得到的ITAE值,优化效果更突出。

图6 MMC-HVDC系统仿真模型
此外,加入标准遗传算法、标准蚁群算法与改进ALO算法的横向比较,以验证改进算法的优越性,结果见图8。
由图8可知,标准蚁群算法和标准遗传算法的收敛速度比之改进ALO算法慢,最终ITAE值也偏大,优化效果改进ALO算法最佳。
通过几种算法对比可证明,本文改进算法具有一定的优越性。用上述5种算法分别进行10次优化,由于数据繁多,表3仅列出了10次优化中得到最小ITAE值时的最优PI参数。
通过表3数据对比可发现,改进ALO算法得到的值最小。未列出数据表明,每次优化改进ALO算法得到的值都小于其余几种算法,证明本文改进算法具有优势。ITAE值的减小,说明系统动态响应速度得到了提高,且通过本文改进算法提高的效果最好。将优化前后的参数代入模型进行仿真,可以得到如图9~图12所示的波形。比较图9、图10,参数优化后,A相桥臂内部环流大小由原来的[-1.5,1.5] A减小为[-0.6,0.6]A,说明优化后参数增强了系统的环流抑制能力。同时,由于桥臂环流得到了抑制,上桥臂的电流波形畸变也减小了。

表3 5种算法优化后最优结果对比
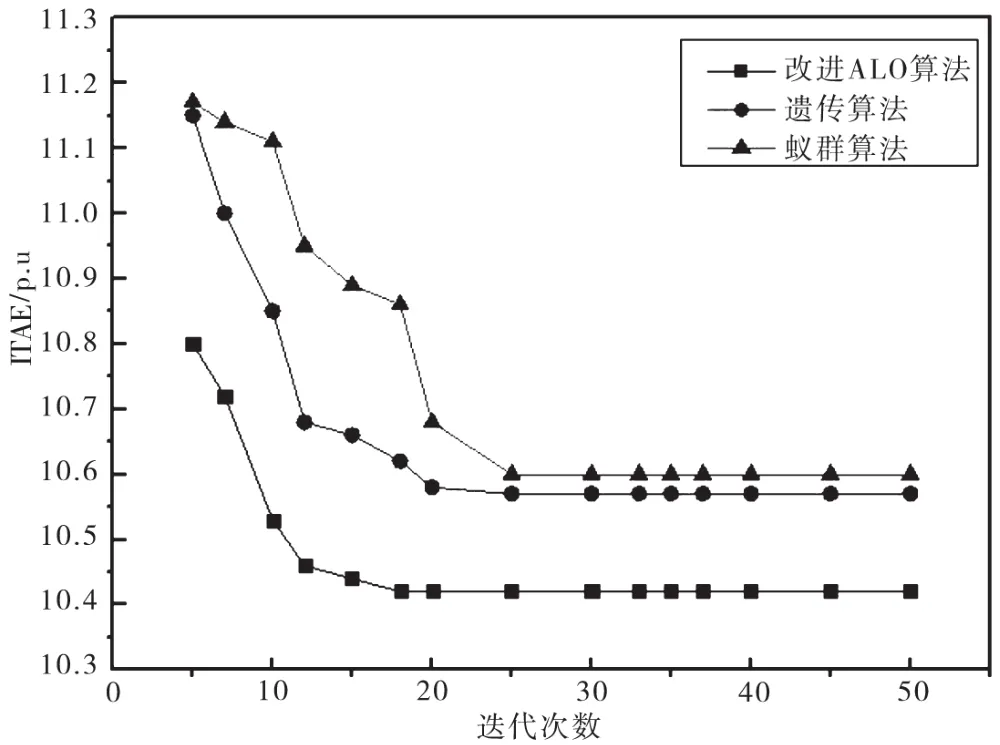
图8 ITAE指标图
6 结 论
针对模块化多电平换流器控制系统多个PI控制器PI参数优化困难的问题,在现有MMC最近电平逼近调制策略基础上,提出基于改进蚁狮算法的控制器PI参数优化方法。改进方面主要集中解决原算法易陷入局部最优及收敛速度慢等问题。具体地,引入Tent映射的混沌思想,在初始化种群时增加变量取值多样性,避免算法陷入局部最优;融合精英竞争,加快算法收敛速度,减少计算量;取系统指标ITAE值作为目标函数,用以衡量参数优化效果。通过MATLAB与PSCAD之间的联合调用及数据交互,对MMC双闭环控制环节的控制器PI参数进行优化,并对比多个算法的优化效果。仿真结果表明:改进后的算法寻优精度更好,收敛速度更快,且使用改进算法优化的控制器PI参数可以有效改善电流波形,提高系统动态性。
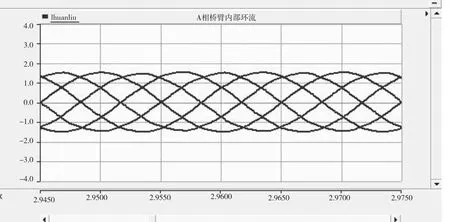
图9 优化前A相环流波形
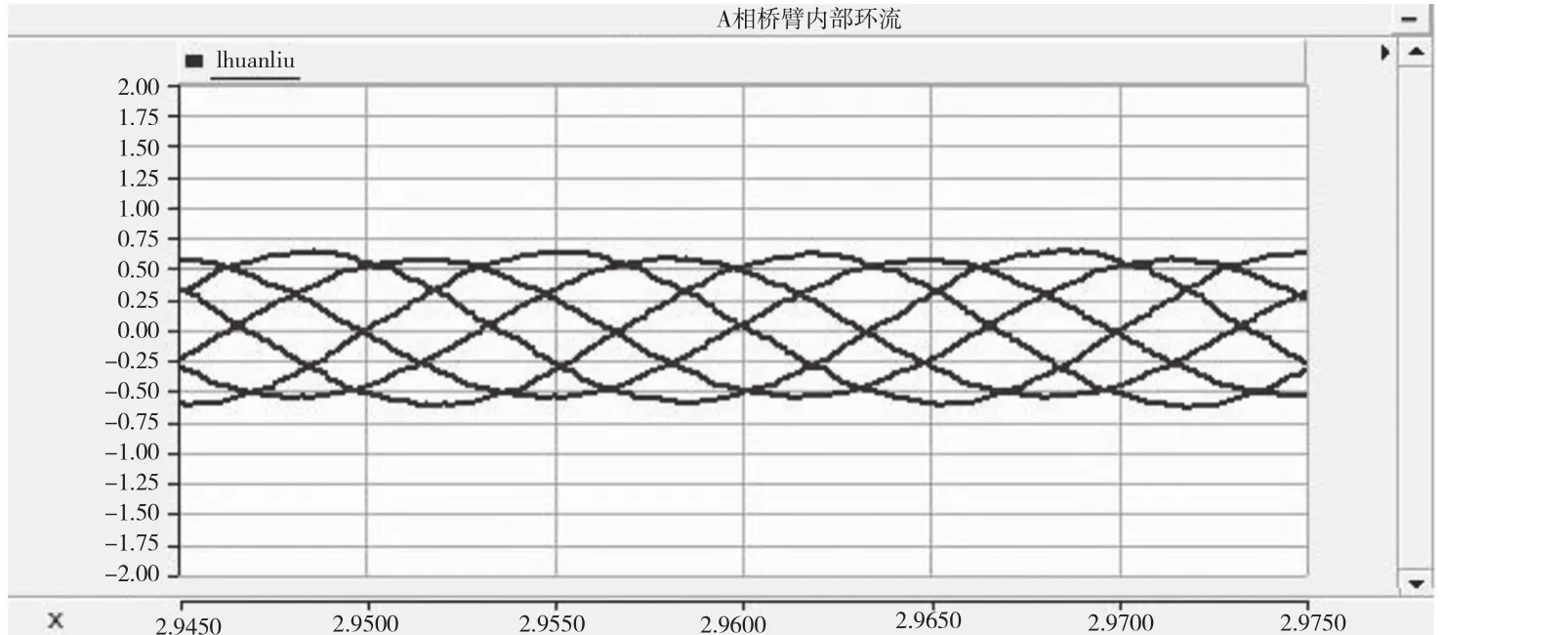
图10 优化后A相环流波形
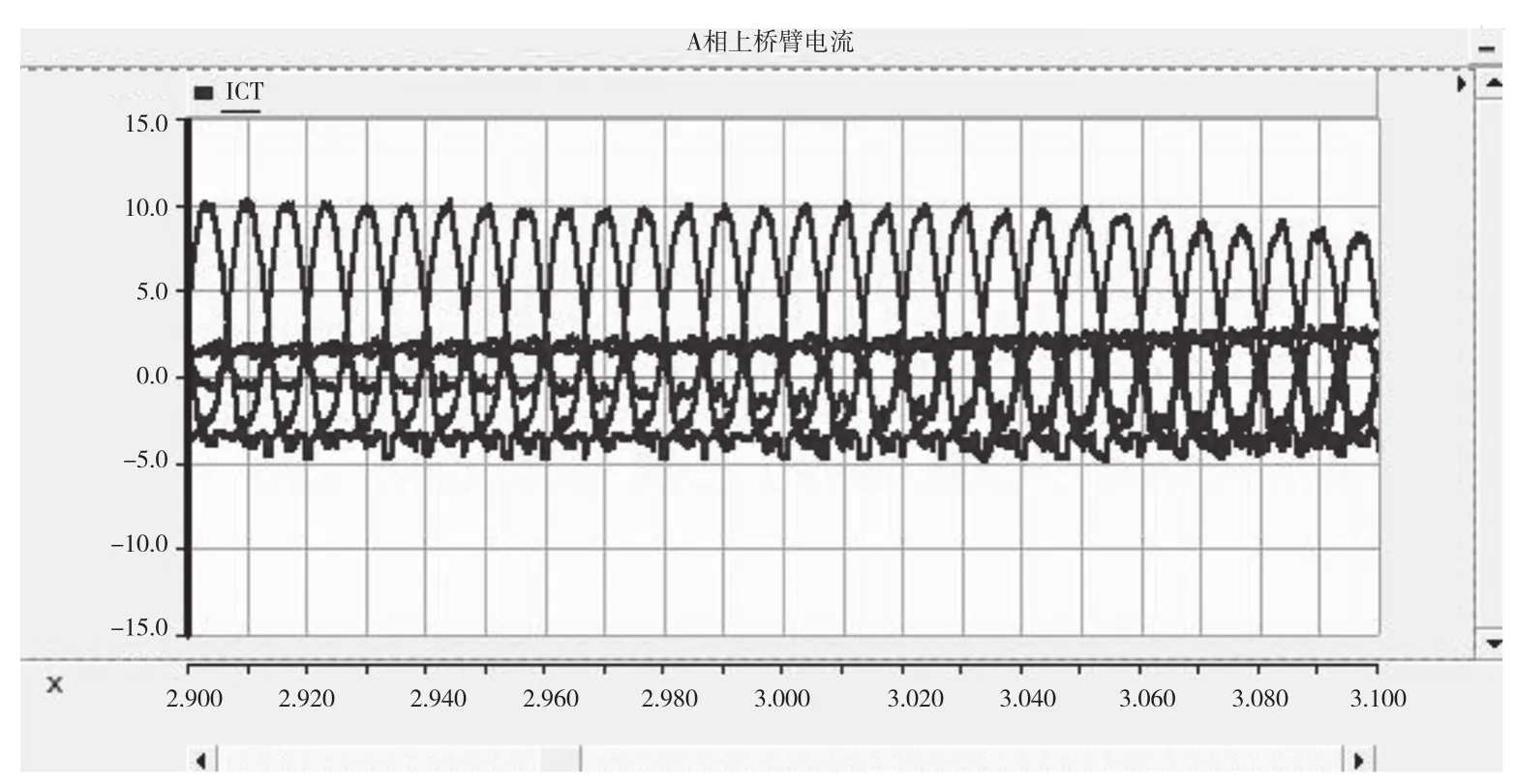
图11 优化前A相上桥臂电流
图12 优化后A相上桥臂电流
