车队控制中的一种通用可变时距策略
2019-08-21于晓海郭戈
于晓海 郭戈
智能交通系统(Intelligent transportation system,ITS)是未来实现高效、环保、经济交通出行的重要技术[1−2],尤其是几乎所有城市都在面临严峻的交通拥堵和空气污染问题,因此,从交通管理部门、企业界到学术界都非常关注智能交通系统相关技术研究[3−4].作为ITS技术的重要组成,车辆队列行驶控制(也称道路火车)技术使同车道的车辆以较小的安全距离列队行驶,从而减小车辆行驶中的空气阻力,可大幅降低油耗,提高道路容量及交通流量,缓解交通拥堵.因此,车队行驶技术受到越来越多的关注[5−6].
车队中的车辆相互耦合,任何扰动引起的操作误差,有可能沿车队向后传播放大,导致车队跟踪性能下降甚至不稳定,因而带来严重的后果.车队行驶控制的关键在于设计一个合理的车辆间距策略,这直接关系着车队整体稳定及全局交通流的稳定性和交通效率[7].常见的间距策略包括固定间距策略(Constant spacing policy,CSP)、可变间距策略(Variable spacing policy,VSP),其中可变间距策略又分为固定时距策略(Constant time headway policy,CTHP)(或固定时隙策略)和可变时距策略(Variable time headway policy,VTHP)两种.
固定间距策略最为常用,可实现较小的车间距,从而使车队控制的优点最大化.但是,固定间距策略要求车辆间的信息交换与反馈及时可靠,当车辆间的通信不稳定或受限时,固定间距策略不能保证车辆队列稳定性.采用固定间距策略的研究文献很多,其中,文献[8]分析并对比了固定间距下不同拓扑结构的车队控制方法,文献[9]研究了双向异质信息反馈时的车辆队列控制问题,文献[10]给出了传感器测量距离受限时的车辆队列控制方法,文献[11]考虑通信延时,提出一种新型固定间距策略及相应的车队控制方法,文献[12]基于车辆动力学不确定性以及车间一致通信延迟,将一种H∞控制方法应用于异质车队中,确保了车队的鲁棒性、跟踪性与队列稳定性,文献[13]提出一种状态预测与反馈控制相结合的车队控制方法,该方法可对无线通信环境不理想情况下的信息传输延迟进行补偿,并进一步发现最大可延迟时间由车队拓扑结构的最大特征值所决定,与此同时,通过LMI(Linear maxtrix inequality)方法获得了较好的车队鲁棒性.
为克服固定间距策略下的车队控制对信息反馈和通信可靠性与实时性要求高的问题,可采用固定时距策略,此时车辆无需实时通信,只需后车与前车保持一个固定的行驶时间距离.这种方法易于分析与设计,也能确保单车及队列稳定性,但车速较高时,车间距往往较大,不利于发挥车队控制在降低油耗和提高道路利用率等方面的优越性,而且文献[14]指出该策略存在交通流不稳定情况,从而带来交通拥堵、车队失控等安全隐患.采用固定时距策略的研究文献也比较多,文献[15]研究了多种拓扑结构下异质车队的自适应控制与辨识,文献[16]提出一种能克服传感器/执行器延迟的自适应巡航控制方法,文献[17]针对加速度不确定的非线性车队,提出一种可以消除初始条件干扰、减小车间距的自适应滑模控制方法,文献[18]基于Lp范数,在车队控制中采用一种新的队列稳定性定义,可用于线性或非线性系统,并可独立于车队拓扑结构进行分析,同时对初始条件摄动及外部扰动也能较好适应,文献[19]考虑异质扰动及饱和约束条件,并根据Lp队列稳定性,提出一种前馈与反馈相结合的车队控制新方法,有别于传统分布式模型预测控制以及单纯鲁棒反馈控制,该方法通过事件触发机制显著降低车间通信频率与规划计算成本,在减少控制器保守性的同时,取得了更好的控制效果.
近年来,在固定间距和固定时距策略的基础上,出现了一些基于可变时距策略的车队控制方法.文献[20]设计了一种减小邻车间距、提高交通容量的自适应控制方法,文献[21]提出一种降低油耗并保证车队稳定的PID控制方法,文献[22]给出一种多工况异质车队避碰的控制方法,文献[23]基于虚拟前车,提出一种减小瞬态响应时间与间距误差的车队控制方法,文献[24−25]给出一种确保单车及队列稳定的LMI方法.这些方法通过改变车间行驶时距,及时调控/优化车间距,从而提高道路利用率、节约燃油,保证车队稳定性、安全性和速度响应.但相关文献并未提出可变时距策略的一般性分析方法,也缺乏在不同工况下将可变时距策略转换为固定间距、固定时距策略的兼容性研究,因此应用范围有限、通用性不高.
另外,在车队稳定的同时,能否保持交通流畅即交通流是否稳定,也缺少必要的分析.基于此,文献[26−27]进一步考虑交通流稳定性,其中,文献[26]根据驾驶员经验拟合曲线得到车间行驶时距,给出一种改进的交通流及队列稳定的车队控制方法,文献[27]为满足稳定性分析通过抽象指数函数得到可变行驶时距,提出一种交通流及车队稳定的PID控制方法.
需要指出的是,已有的各种车间距策略各有优劣,适用于不同的车队构成、道路及通信条件.本文旨在给出一种统一形式的车间距策略,既兼备各种已有车间距策略的优点,又可通过参数的选择适用于各种不同工况条件.另外,已有多数文献只考虑了单车及队列稳定性,并未考虑交通流稳定性,可能导致交通拥堵和车队失控等问题.第三,文献[26−27]虽考虑了交通流稳定性,但可变行驶时距需根据经验或抽象函数才能得到,缺乏准确性、物理意义不明确,不利于实际应用.本文的主要贡献包括:
1)给出车队可变时距策略的一般形式,并通过可变行驶时距参数的选择来兼容固定间距策略、固定时距策略,建立统一的车间距误差模型,得到不同工况下车队的综合性能;
2)除单车与队列稳定外,特别考虑了通用可变时距策略的交通流稳定性,综合设计控制器,从而保证车队行驶安全畅通,并将分析方法推广到固定时距与固定间距策略中;
3)提出一种物理意义明确的可变行驶时距计算方法,并结合车队与交通流稳定条件,得到可变行驶时距的变化界限,便于车队准确快速响应.
后续内容:第1节,系统建模及本文目标;第2节,车队与交通流稳定性分析与综合;第3节,仿真对比各间距策略性能;第4节为结论.
1 系统建模及目标
如图1,若同质车队中车辆动力学特性为式(1),其中各参数定义见表1.

图1 车队间距控制(虚线代表信息传输方向)Fig.1 Spacing control of the platoon(The dotted line represents the direction of information transmission.)
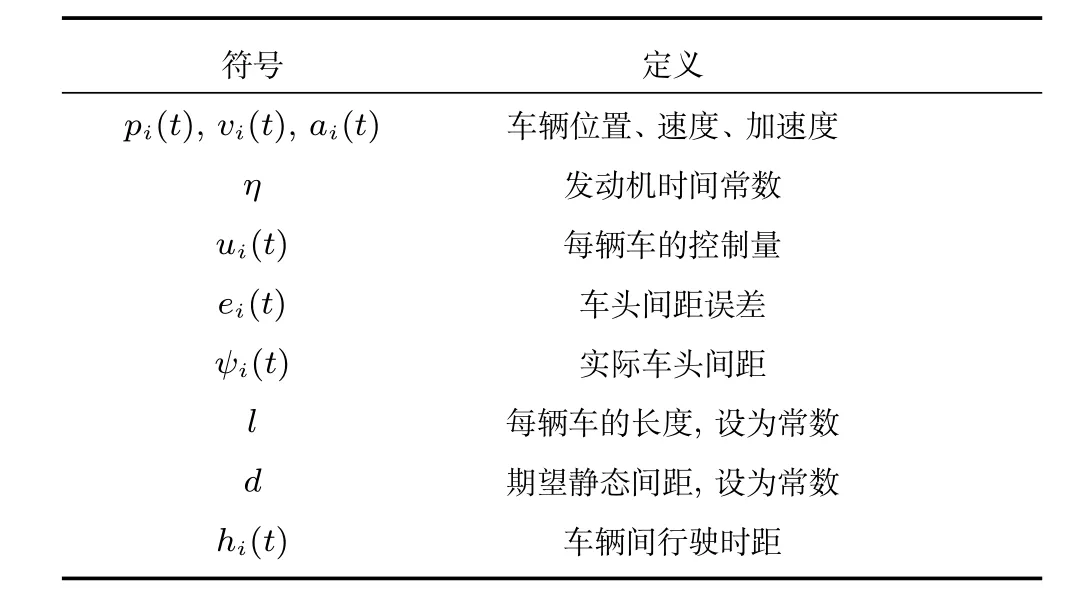
表1 车队参数说明Table 1 Platoon parameters explanation
注 1.表中i={0,1,···,n},为车辆索引号.其中,领队车为0号.

本文所提出的通用可变时距策略为:

基于式(2),建立统一的车间距误差模型:

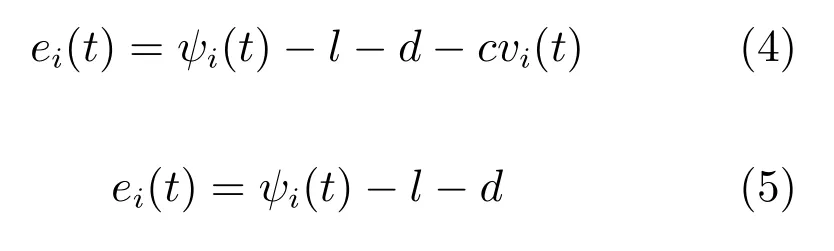
注2.根据式(2)中hi(t)参数的不同取值,可使固定时距与固定间距策略作为可变时距策略的应用特例,从而实现不同间距策略的兼容.当hi(t)=c(正常数)时,可变时距策略转换为固定时距策略,此时车间距误差为式(4);而hi(t)=0时,可变时距策略转换为固定间距策略,车间距误差为式(5).
本文控制目标如下:
1)单车稳定,指车队中每辆车渐近稳定,也称车队内部车辆稳定,此时:

2)队列稳定,指领队车受扰动时,车间距误差不向上游车辆放大传递,保持车队整体稳定[28],即:

3)交通流稳定,指车队稳态时,交通流量(q)关于交通流密度(ρ)的梯度为正,即:

为便于研究,假设车队满足以下条件:
假设1.车队沿单车道直线行驶,领队车可实时机动.
假设2.每辆车安装高精度的车载雷达,时刻感知与前车的相对位置、相对速度.
假设3.分析单车稳定时,期望加速度可瞬时传递给执行机构,即ui(t)=ai(t).
2 车队与交通流稳定性分析
由于式(2)中hi(t)时变,为便于稳定性分析,令f(vi(t))=hi(t)vi(t),并代入式(3)有:

根据假设2,控制器设计为:

其中,kpi、kvi为第i辆车的待定控制增益.
2.1 单车稳定性
定理 1.若车队采用式(2)车间距策略及式(10)控制器,则单车渐近稳定即式(6)成立,需满足:

其中,σ为待定正数.
证明.
由式(6)知,单车渐近稳定时有:

对式(9)两端同时求导:

联合式(12)和式(13),得期望加速度:

由假设3得式(11)成立.
推论1.若车队控制器结构同定理1,并分别选择固定时距或固定间距策略,则单车稳定需满足:
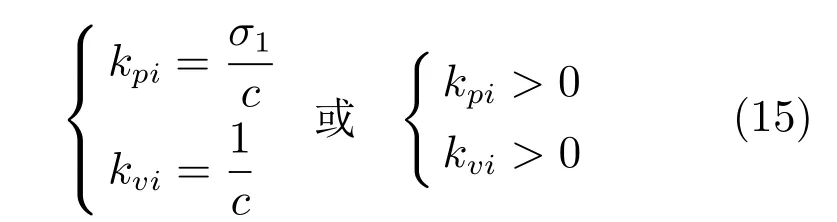
其中,σ1为待定正数.
证明.
1)固定时距策略时,由式(4)和式(9)得:
按照定理1的推导,将式(16)代入式(14)并将σ替换为σ1,即得kpi、kvi.
2)固定间距策略时,由式(5)和式(9)知:

此时,结合式(10)、(13)和式(17)及假设3有:

又由式(1)、(3)和式(18)得车间距误差闭环模型:

对式(19)进行拉氏变换,并根据劳斯稳定判据知:当kpi、kvi为正时,单车渐近稳定.
2.2 队列稳定性
车队行驶过程中,在平衡点vi(t)=ve处,对式(9)进行线性化,并忽略高阶项有:
将式(20)简化为:

其中

定理2.若车队所采用的车间距策略及控制器同定理1,则队列稳定即式(7)成立,需满足:

证明.对式(21)左右两端同时求导:

再对式(23)求导,并结合式(1)有:

将式(10)、(11)和式(23)代入式(24)有:

进而
又由式(1)、(3)和式(21)得:

对式(27)两端同时求二阶导数有:

比较式(26)和式(28)得:


对式(30)两端同时进行拉氏变换,得:
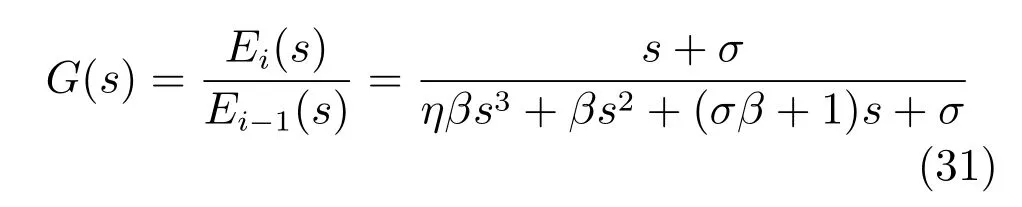
由式(7)知,队列稳定需|G(jω)|<1,结合式(31)有:

经计算得:

根据式(33)有:

由式(34)解得:


推论2.若车队控制器结构同定理2,并分别选择固定时距或固定间距策略,则队列稳定需满足:式(22)或式(36)成立.
证明.
1)固定时距策略时,由于式(4)和式(21)结构相同,且均使用同类控制器,因此按照定理2的证明过程,可得队列稳定条件为:
c>2η,结合式(15)同样有式(22)成立.
2)固定间距策略时,根据式(1)、(3)、(5)及(10)有:

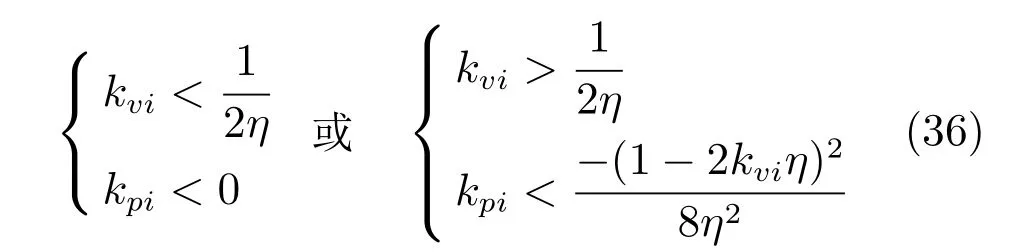
对比式(30)并使用相同方法,则队列稳定需满足:

化简为:

根据式(39)解得式(36)成立.
注3.将式(15)与(36)相比较,可知自主行驶时固定间距策略不能同时实现单车与队列稳定,故后续不再考虑其交通流稳定性.
2.3 交通流稳定性
定理 3.若车队所采用的车间距策略及控制器同定理1,则交通流稳定即式(8)成立,需满足:

证明.通过式(9)得稳态车头间距为:

其中,vs为车队稳态速度,此时稳态交通流密度:

由式(42)得:

因此

由稳态交通流量q=ρvs,有:

联合式(44)和式(45)得:

将式(11)、(22)与式(46)相结合有:

于是,

若同时满足式(8)和式(49),则式(40)成立.
推论3.若车队控制器结构同定理3,并选择固定时距策略,则交通流不稳定.
证明.根据式(4),此时稳态车头间距为:

与式(41)比较有:

将式(51)代入式(44),并联合式(45)得:

对任意交通流密度,式(52)中∂q/∂ρ均为负值,通过式(8)知,此时交通流不稳定.
定理4.若车队所采用的车间距策略及控制器同定理1,且车间可变行驶时距采用式(53),则单车、队列及交通流稳定,需满足式(54):

其中,c1和µ为待定正数.
证明.由式(9)中f(vi(t))定义及式(53)得:

根据定理1和2中式(11)与式(22)有:

又由式(42)和式(55)知,稳态交通流密度为:

结合定理3中式(40),得:

联合式(56)与式(58),得式(54)成立.
注4.由式(53)可准确计算出车间可变行驶时距,并且该计算方法具有明确的物理含义:当前车速度更快时,车间行驶时距可适当减小;反之,需增加车间行驶时距.
3 仿真对比
为检验上述设计方法,选择由1辆领队车和5辆跟随车构成车队进行计算机仿真,具体仿真参数见表2.假设每辆车发动机时间常数为η=0.3秒,初速度为17米/秒即61.2公里/小时,邻车间静态车头间距为8米.

表2 仿真参数Table 2 Simulation parameters
领队车机动过程如图2所示,首先匀速前进2秒,再给1.5米/秒2的加速度3秒并保持匀速,之后以−1米/秒2减速3秒,然后匀速行驶,最后以0.75米/秒2加速2秒.由于领队车不断机动行驶,给整个车队带来扰动,从而使跟随车不断调节与前车间距,保证行驶安全.本文将固定间距策略、固定时距策略以及可变时距策略进行对比仿真,如图3所示.

图2 领队车速度、加速度Fig.2 Leading vehicle velocity and acceleration

图3 车间距策略比较(第1∼3列图分别采用固定间距、固定时距以及可变时距策略)Fig.3 Comparison results with different spacing policies(CSP,CTHP and VTHP are used for column 1 to 3 of the diagram respectively.)
图3(a1)∼(a3)是邻车间距误差变化情况.其中,各车间距策略的稳态误差均可收敛到零,以保证单车渐近稳定.另外,固定间距策略误差较大,最大值为4.30米且e1∼e5依次放大、队列不稳定,存在碰撞的可能,而固定时距与可变时距策略误差较小,最大为0.36米、0.30米且队列稳定.相对于固定时距策略,可变时距策略的误差曲线更加平滑.
图3(b1)∼(b3)为车辆位置关系.固定间距策略队形紧密,车间距在8米左右,但分布不均匀,第3秒、第27秒相对较窄,易产生位置重叠发生碰撞,而另两策略的车辆行驶位置基本保持匀称,车间距分别为23.5米、20米左右,车队行驶安全.
图3(c1)∼(c3)是跟随车的速度变化情况.固定时距与可变时距策略的速度跟踪效果较好,而固定间距策略误差较大,最大误差为1.65米/秒.
图3(d1)∼(d3)是跟随车加速度变化情况.固定间距策略误差较大,且第12秒、第26秒及第42秒存在波动,而另两策略的加速度曲线跟踪较缓和,可变时距策略跟踪精度更高、响应更快.
图3(e1)∼(e3)是跟随车的抖动比较.各车间距策略的抖动趋势基本一致,其中固定间距、固定时距策略最大抖动为1.2米/秒3、1.25米/秒3,而可变时距策略约为1.5米/秒3.由于可变时距策略对加速度具有更好的跟踪精度,因此抖动稍大.但从抖动时长来看,可变时距策略最短,在第12∼18秒、第22∼29秒基本无抖动,而另两策略无抖动时间较短.综上所述,车队综合性能见表3.

表3 车队综合性能Table 3 Comprehensive performance of the platoon
通过表3可知,对通信受限的车队而言,由于固定间距策略不能保证队列稳定性,因此领队车速变化所产生的扰动直接作用于车队,从而整体性能较固定时距与可变时距策略更弱;而固定时距策略,由于所选择的邻车间行驶时距为定值,因此车队高速行驶时,车间距较大,从而降低道路利用率、增加燃油消耗,并且产生交通流不稳定以及道路拥堵等情况,带来安全隐患;本文所采用的可变时距策略,根据邻车间相对速度的变化,实时调节车间行驶时距,从而不断优化邻车间距,这样可以克服固定时距策略的上述问题,保证交通流畅、高效环保,因此具有更优的性能.
4 结论
本文将一种通用可变时距策略应用于通信受限条件下的车队控制,根据邻车间相对位置、相对速度及可变行驶时距参数,设计形式统一的车间距策略及其误差模型,该模型能较好兼容已有车间距策略.基于这种通用可变时距策略进行了单车与队列稳定性分析,并针对当前交通拥堵现状,进一步研究了交通流稳定性,同时将上述分析方法进行推广,综合设计控制器.从应用角度,给出一种物理含义清晰、计算准确快速的可变行驶时距形式,结合稳定性条件得到其变化界限.从仿真结果来看,该通用可变时距策略在车间距安全、队列保持、交通流稳定、速度与加速度跟踪以及抖动时长等方面,具有较好的控制效果;而固定时距策略能实现单车与队列稳定,但交通流不稳定,可能产生交通拥堵,带来安全隐患;对于通信受限的自主车队而言,虽然固定间距策略可实现较小车间距,但不能保证单车与队列同时稳定,存在车辆碰撞的可能.
后续研究将进一步考虑协作车队的可变时距策略,特别是非线性可变时距策略的特性研究,并探讨队列扩展、通信中继以及无线通信不稳定情况下的车队控制等相关课题.
