油菜机械直播作业厢面地表粗糙度测量与分析
2019-08-19刘立超张青松肖文立魏国粱高丽萍廖庆喜
刘立超,张青松,2,肖文立,2,魏国粱,高丽萍,廖庆喜,2
油菜机械直播作业厢面地表粗糙度测量与分析
刘立超1,张青松1,2,肖文立1,2,魏国粱1,高丽萍1,廖庆喜1,2※
(1. 华中农业大学工学院,武汉 430070;2. 农业农村部长江中下游农业装备重点实验室,武汉 430070)
油菜机械直播后种床整理质量是影响油菜成苗率的关键要素。针对目前油菜机械直播种床厢面粗糙度测量和数据处理方法不能完全反映地表真实情况的现实问题,该文提出一种基于激光雷达扫描技术的区域地表粗糙度现场测量和量化方法,通过测量装置可快速获取油菜直播厢面幅宽内的地表高程三维数据。基于油菜机械直播作业特性,对采集的作业厢面高程数据进行去倾斜趋势和去边坡趋势处理,降低了厢面倾斜和边坡特征对粗糙度计算的影响。对不同空间采样间隔和不同采样角度截面数据的粗糙度统计结果表明:170 mm采样间隔下的平均均方根高度和均方根高度平均误差均高于5 mm采样间隔下的计算结果;在垂直机组前进方向0°、45°和90°三个方向上地表截面高程数据的均方根高度最大差值和相关长度最大差值分别为7.69 mm和25.14 mm,且带有种沟等结构化特征的油菜种床厢面存在明显的各向异性。以不同大小区域的滑动取样窗口进行局部粗糙度量化的统计结果表明:当窗口宽度为厢面幅宽和0.5倍时,窗口长度大小不低于1.2 m可使均方根高度的标准差稳定在0.27 mm以内,而通过对每个取样窗口进行单独去倾斜趋势处理可消除地表局部倾斜对粗糙度计算的影响。研究结果可为油菜机械直播作业厢面粗糙度测量和量化方法提供参考依据。
土壤;粗糙度;激光雷达;油菜机械直播;特征分析
0 引 言
长江中下游地区是中国主要的冬油菜种植区,近年来随着油菜机械化生产技术的发展,该地区油菜机械化播种作业水平逐年提升[1]。油菜机械直播可大幅提高生产效率,实现节本增效。受长江中下游地区土壤质地和墒情条件影响,机械直播后种床厢面整理效果成为影响油菜播种成苗率的关键要素[2]。
油菜直播作业厢面质量包括厢面平整效果、碎土率和种沟质量等,这些因素均会对油菜出苗和后期生长造成一定影响。厢面质量可用厢面地表粗糙度进行定量评价,目前对于油菜播种后种床厢面粗糙度的测量手段还较为传统[3-4],接触式测量方法由于采样样本量不足导致测量数据无法准确反映地表真实状况。随着地表观测技术的发展,多种非接触式地表高程测量方法在农业耕作和微波遥感领域得到广泛运用[5]。其中摄影测量和激光测量是非接触式地表高程测量的主流应用技术,摄影测量技术通过线采样[6-7]和面采样[8-9]的方式可获取连续地表高程数据,其测量精度受光照强度和阴影环境影响,多适用于尺度变化较小的地表高程测量场合[10];激光测量技术主要将单点激光传感器[11-12]或线结构光传感器[13-14]安装在单个或正交直线导轨上,通过控制传感器沿导轨移动完成单截面或平面区域地表高程数据采集,其测量精度与传感器选型直接相关。受导轨结构尺寸限制,激光测量技术应用于平面区域采样时单次覆盖面积一般低于2 m2。其他非接触式测量技术如多视角红外光谱[15]、阴影分析[16-17]、声波测量[18]、雷达图像[19]等,相比于激光和摄影测量,在地表高程测量方面并没有体现出明显优势,因此未得到广泛的应用。
油菜机械直播种床厢面在土壤工作部件的作用下呈现种沟等结构化特征,且粗糙度受种沟等特征影响表现为各向异性。因此,厢面粗糙度测量和处理方法的合理性均会影响粗糙度的客观评价。现有研究成果表明测量范围是影响粗糙度计算准确性的重要因素,由于地表存在空间异质性,采样长度[20-21]、采样数量[7]和采样区域大小[22]的选取均会对测量结果产生影响。此外,对测量数据的预处理也是影响粗糙度计算结果准确性的关键因素,去除数据倾斜趋势对于较大斜坡地表粗糙度计算结果的准确性至关重要[23],而通过去倾斜趋势无法消除的地表结构化弯曲特征同样影响粗糙度计算的最终结果[24]。由此可见,相比油菜机械直播地表高程数据采集方法的重要性,测量数据的前处理方法同样重要。
本文针对现有非接触式地表粗糙度测量方法存在单次测量覆盖面积较小的问题,提出一种基于地面激光雷达的油菜直播作业厢面粗糙度现场测量方法,借助测量系统快速获取油菜种床厢面幅宽内地表三维坐标,通过对油菜种床厢面的特征分析及合理的数据预处理,使数据计算结果能够准确评价油菜种床厢面粗糙度,以期为油菜机械直播后厢面作业质量的定量评价提供参考依据。
1 材料与方法
1.1 测量对象
本文主要研究长江中下游地区油菜机械直播后厢面粗糙度特征,因此选取该地区油菜机械直播后的作业厢面作为测量对象。目前适用于长江中下游地区机械直播的油菜联合播种机具分为2类:一类是具有旋耕部件的油菜联合直播机[25],另一类是带有主动旋转开沟装置的油菜免耕直播机[26-27],受该地区地块大小限制,2类直播机作业幅宽均为2 m左右,去除用于排水的畦沟宽度,油菜种床厢面幅宽约为1.6 m。油菜联合直播机采用耕播集成理念,一次作业完成旋耕、播种、施肥、覆土和开沟等工序;而油菜免耕直播机利用主动旋转开沟装置,在分土板约束下将沟内土壤均匀覆盖到种床厢面,免去旋耕作业工序,属于保护性耕作方式。
为获取不同类型油菜种床厢面粗糙度参数,本文选用华中农业大学工学院研制的2种不同结构形式的油菜直播机[25,27]播种作业后的种床厢面为测量对象,如图1所示。由于2种油菜直播机结构形式和作业原理的差异,其作业后种床厢面特征存在一定区别。油菜免耕播种作业对土壤扰动小,主动式开沟装置能够使厢面与畦沟形成明显分界,进而使厢宽范围内保持原有地表平整状态;而油菜联合直播机作业时由于旋耕机和被动式开沟犁的交互作用,会在种床厢面与畦沟连接部位形成倾斜边坡,使种床厢面与畦沟的边界模糊,且种床厢面最外侧2行油菜均播于边坡上,若不考虑种床厢面边坡的影响,则会对粗糙度的计算结果造成较大误差。

图1 两种油菜直播机及其作业后地表形态
1.2 种床厢面粗糙度测量装置
种床厢面粗糙度测量装置主要包括激光雷达(SICK LMS511-10100 PRO,扫描角度190°,测距分辨率1 mm,采样角度分辨率0.166 7~1°,采样频率25~100 Hz)、直线导轨(北京时代超群电器科技有限公司,节距3 mm,带轮齿数24)、步进电机(北京时代超群电器科技有限公司,步距角1.8°)、驱动控制器、支架和便携式计算机等,如图 2所示。激光雷达安装在直线导轨的滑块上,在步进电机带动下沿导轨直线移动,其有效移动距离为2 m,驱动控制器通过获取编码器信号实现步进电机闭环控制及柔性启停,便携式计算机通过串口和以太网分别与驱动控制器及激光雷达连接,并通过上位机测量软件实现人机交互、与驱动控制器通讯及接收、存储激光雷达采集的数据。对测量数据进行误差补偿及坐标转换,即可得到完整的地表三维高程数据。
激光雷达以线扫描方式对待测地表进行数据采样,测量过程中步进电机间歇运转带动激光雷达沿导轨一端移动到另一端,上位机测量软件控制激光雷达在步进电机各间歇停止位置开启数据采样,同时以极坐标形式返回各测量点距激光雷达扫描中心的距离数据。测量装置的空间采样间隔与激光雷达扫描方向采样分辨率及垂直扫描方向的采样间距有关。如图2所示,在1位置时激光雷达单帧采样数据与地表截面形成的测量曲线用1表示,其相邻数据点的横向间距d可表示为

式中l为激光雷达扫描中心距测量地表水平线0的垂直距离,mm;θ为点扫描位置的扫描角度,rad;为采样角度分辨率,rad。
当激光雷达从1位置沿箭头方向移动到2位置,其间歇移动距离Δ与步进电机转动角度的对应关系为
注:*表示经过去边坡处理后的粗糙度计算数据。数据为均方根高度±标准差以及相关长度±标准差。
Note: * represents the roughness calculation data with the slope trend processing. The data formats are root mean square height±standard deviation and correlation length±standard deviation.
对比油菜联合直播机消除边坡趋势前后的粗糙度参数可以发现,边坡趋势对垂直作业方向的均方根高度影响最大,去除边坡趋势前后的均方根高度数值最大相差24.0%,而相关长度在去边坡趋势处理后在3个方向上均有减小,去趋势前后最大相差31.5%。去边坡趋势处理提高了粗糙度计算结果的正确性。
需要明确的是,虽然油菜免耕直播机相较于油菜联合直播机作业厢面具有较小均方根高度数值,但是两者具有不同的作业原理,其横向比较的结果不能作为2种油菜直播机后续成苗率和生长状况的评价依据,同一种类型油菜直播机的粗糙度对比才具有指导意义。
2.3 种床厢面各向异性分析
根据前述分析可知,2种油菜直播机作业厢面粗糙度参数在3个不同方向上存在明显差异,为进一步研究不同方向上的粗糙度分布特征,对测得的1组油菜免耕直播机作业地表高程数据进行变角度插值处理,得到181组截面数据,每组截面数据对应地表长度为1.4 m,角度间隔为1°,图中直角坐标系轴与机组作业方向垂直,轴与机组作业方向平行,原点在圆周中心,如图 8a所示。
对插值后的圆形区域数据进行粗糙度统计,结果如图8b、8c所示:在角度分布为垂直机组作业方向90°左右的区域,由于截面方向沿着种沟分布的方向,均方根高度数值明显小于平均值14.03±2.66 mm,而其他角度分布区域的截面均跨越种沟,使得均方根高度数值较大。同样,各截面的相关长度也受到种沟特征的影响,存在明显各向异性,相关长度的均值为71.96±21.50 mm。相比于均方根高度的有序平缓变化,相关长度的变化受种床厢面高程分布特征影响更为明显,其标准差为均方根高度标准差的8倍,且在垂直机组作业方向90°左右的区域,相关长度受地表局部凸起或坑洼影响产生部分无序的数值跳变,表明地表局部特征对相关长度参数有较大影响。由此可见,油菜机械直播后种床厢面粗糙度在不同角度截面的分布具有一定规律性,存在均方根高度和相关长度明显大于或小于其平均值的扇区,这些扇区即是地表粗糙度各向异性的标志。

图8 地表粗糙度均方根高度和相关长度的各向异性
2.4 不同区域面积大小粗糙度计算结果分析
由于粗糙度的计算结果与所选取的截面方向密切相关,且高度依赖于选取截面的尺度大小,为消除方向因素对均方根高度计算结果的影响,采用区域数据进行粗糙度参数计算。为研究区域大小对粗糙度的影响规律,依据随机抽样方法,对厢面测量区域进行不同窗口大小的数据区域划分(图9)。
以油菜联合直播机作业厢面为研究对象,取窗口宽度的大小等级分别为种床厢面宽度的1、0.5和0.25倍,得到3组不同宽度窗口尺寸,每组宽度尺寸下的窗口长度范围为0.2~2 m,长度间隔梯度为0.2 m,且每个尺寸窗口在测量区域内随机抽取50个样本,局部均方根高度的计算结果为50个窗口区域的均方根高度均值,相关长度为所有窗口长度方向上地表轮廓数据计算结果的均值。
每组窗口宽度固定时,粗糙度随窗口长度变化的统计结果如图10所示。可以看出,消除倾斜趋势的均方根高度总比未消除趋势的数值小,其最大差值为1.05 mm,可见在全尺寸厢面内进行的去趋势处理并不能消除局部的倾斜特征,且窗口区域选取的尺寸越小,去趋势前后的均方根高度数值差异越明显。
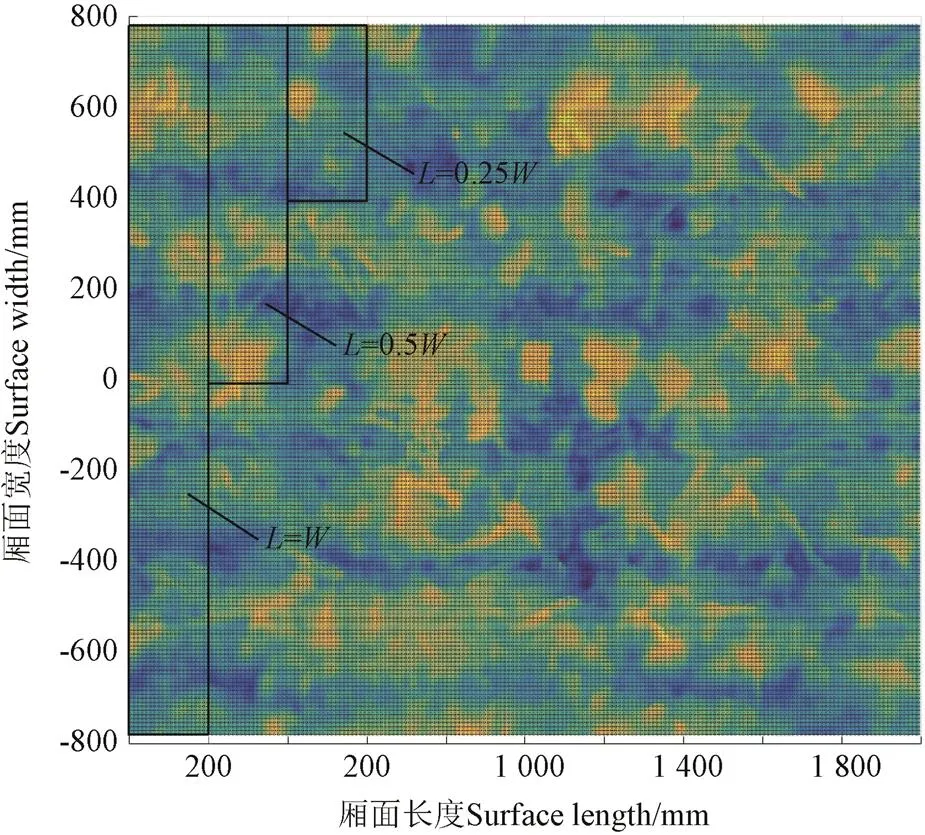
注:L、W分别为窗口宽度和种床厢面宽度,mm。下同。
从3组不同窗口宽度的局部均方根高度统计趋势和标准差数据可以看出,3组均方根高度数值均随着窗口长度的增加呈现先增后缓慢减小的变化趋势;当窗口宽度为厢面幅宽和0.5倍厢面幅宽时,窗口长度不低于1.2 m可使均方根高度计算结果的标准差稳定在较小值,此时,厢面幅宽和0.5倍厢面幅宽对应的均方根高度标准差大小分别不高于0.17 mm和0.27 mm,在窗口宽度为0.5倍厢面幅宽时均方根高度的标准差不高于0.27 mm,也表明油菜联合直播机作业后均方根高度在厢面左右两半区域具有较好的一致性;而在0.25倍的厢面幅宽时,窗口长度需要达到1.6 m均方根高度的标准差才会减小到0.47 mm以内。
相比于均方根高度计算结果在不同窗口长度下的变化,相关长度在2 m的厢面长度区域内并未趋于较小稳定值,且在0.5倍厢面幅宽和0.25倍厢面幅宽时,其标准差受厢面长度的影响较小,均保持在较高水平,只有窗口宽度与厢宽一致时,相关长度的标准差才会随着窗口长度的增加逐渐减小。从消除趋势前后的3组相关长度和标准差数据中可以看出,去趋势处理后,标准差数值均低于未去趋势的标准差,且标准差的差值大小与去趋势前后相关长度差值大小的变化趋势对应。

图10 均方根高度和相关长度与取样窗口大小的关系
在油菜直播作业的厢面粗糙度现场测量中,由于现有测量装置在覆盖面积上的局限,为减小测量区域选取对粗糙度量化误差的影响,可考虑在厢面宽度方向选取半个幅宽作为区域测量的宽度,同时为使不同采样区域的粗糙度计算误差较小,应在厢面长度方向满足1.2 m以上的测量距离。
3 结 论
1)该文基于激光雷达扫描技术实现了油菜直播厢面全幅宽范围内不高于10 mm分辨率的区域地表高程数据采集,通过对油菜机械直播种床厢面特征分析,确定了采集数据的预处理方法,减小了厢面倾斜和边坡特征对粗糙度计算结果的影响。
2)对不同采样间隔和不同角度截面数据的粗糙度统计结果表明:170 mm采样间隔下的平均均方根高度和均方根高度平均误差均高于5 mm采样间隔下的计算结果;在垂直机组前进方向0°、45°和90°三个方向上,地表截面高程数据的均方根高度最大差值和相关长度最大差值分别为7.69 mm和25.14 mm,且带有种沟等结构化特征的油菜种床厢面存在明显的各向异性。
3)以不同大小区域的滑动取样窗口进行局部粗糙度量化的统计结果表明:当窗口宽度为厢面幅宽和0.5倍时,窗口长度不低于1.2 m可使均方根高度的标准差稳定在0.27 mm以内,而通过对每个取样窗口进行单独去倾斜趋势处理可消除地表局部倾斜对粗糙度计算结果的影响。
由于篇幅限制,本文在对厢面地表各向异性分析和不同区域大小对粗糙度计算结果影响的分析中均只选取了1种油菜直播机的作业厢面作为分析对象,且由于测量装置结构限制,在作业方向上单次只完成2 m的采样距离,对局部粗糙度的计算形成一定约束,后续可考虑加长测量范围或进行拼接测量以获取更大区域的连续地表高程数据。
[1] 农业部南京农业机械化研究所. 2017年中国农业机械化年鉴[M]. 北京:中国农业科学技术出版社,2017.
[2] 廖庆喜,雷小龙,廖宜涛,等. 油菜精量播种技术研究进展[J]. 农业机械学报,2017,48(9):1-16. Liao Qingxi, Lei Xiaolong, Liao Yitao, et al. Research progress of precision seeding for rapeseed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9): 1-16. (in Chinese with English abstract)
[3] 刘晓鹏,张青松,肖文立,等. 稻油轮作区驱动圆盘犁对置组合式耕整机设计与试验[J]. 农业机械学报,2017,48(12):33-41. Liu Xiaopeng, Zhang Qingsong, Xiao Wenli, et al. Design and experiment on symmetrical driven disc plows combined tillage machine for rice-rapeseed rotation area[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48 (12): 33-41. (in Chinese with English abstract)
[4] 张青松,肖文立,廖庆喜,等. 油菜直播机深浅旋组合式种床整备装置的设计与试验[J]. 华中农业大学学报,2016,35(4):121-128. Zhang Qingsong, Xiao Wenli, Liao Qingxi, et al. Designing a deep-shallow rotary tillage device of direct rapeseed seeder[J]. Journal of Huazhong Agricultural University, 2016, 35(4): 121-128. (in Chinese with English abstract)
[5] 江冲亚,方红亮,魏珊珊. 地表粗糙度参数化研究综述[J]. 地球科学进展,2012,27(3):292-303. Jiang Chongya, Fang Hongliang, Wei Shanshan. Review of land surface roughness parameterization study[J]. Advances in Earth Sciences, 2012,27(3): 292-303. (in Chinese with English abstract)
[6] 李俐,王荻,潘彩霞,等. 基于神经网络与决策树的土壤粗糙度测量[J]. 农业工程学报,2015,31(14):132-138. Li Li, Wang Di, Pan Caixia, et al. Soil surface roughness measuring method based on neural network and decision tree[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 132-138. (in Chinese with English abstract)
[7] 陶浩然,陈权,李震,等. 近景摄影测量提高裸露地表粗糙度测量精度[J]. 农业工程学报,2017,33(15):162-167. Tao Haoran, Chen Quan, Li Zheng, et al. Improvement of soil surface roughness measurement accuracy by close-range photogrammetry[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 162-167. (in Chinese with English abstract)
[8] Gilliot J M, Vaudour E, Michelin J. Soil surface roughness measurement: A new fully automatic photogrammetric approach applied to agricultural bare fields[J]. Computers & Electronics in Agriculture, 2017, 134: 63-78.
[9] Jensen T, Karstoft H, Green O, et al. Assessing the effect of the seedbed cultivator leveling tines on soil surface properties using laser range scanners[J]. Soil and Tillage Research, 2017, 167: 54-60.
[10] Snapir B, Hobbs S, Waine T W. Roughness measurements over an agricultural soil surface with structure from motion[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 96: 210-223.
[11] 蔡祥,孙宇瑞,林剑辉,等. 基于激光反射的土壤表面粗糙度测量装置设计与试验[J]. 农业机械学报,2010,41(1):70-76. Cai Xiang, Sun Yurui, Lin Jianhui, et al. Design of a laser scanner for characterizing soil surface roughness [J]. Transactions of the Chinese Society of Agricultural Machinery, 2010, 41(1): 70-76. (in Chinese with English abstract)
[12] Jiang C, Lu Z, Zhou J, et al. Evaluation of fractal dimension of soft terrain surface[J]. Journal of Terramechanics, 2017, 70: 27-34.
[13] 李宗南,陈仲新,王利民,等. 基于红外结构光三维技术的土壤表面粗糙度测量[J]. 农业工程学报,2013,29(21):137-142. Li Zongnan, Chen Zhongxin, Wang Limin, et al. A measuring method of soil surface roughness using infrared structured light 3D technology[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(21): 137-142. (in Chinese with English abstract)
[14] 刘洁,杨晓菊,廖宜涛,等. 基于线结构激光传感器的土壤表面粗糙度测量方法研究[J]. 农业工程学报,2019,35(3):134-140. Liu Jie, Yang Xiaoju, Liao Yitao, et al. Study on soil surface roughness measuring method based on line structured light sensor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 134-140. (in Chinese with English abstract)
[15] Croft H, Anderson K, Kuhn N J. Reflectance anisotropy for measuring soil surface roughness of multiple soil types[J]. Catena, 2012, 93: 87-96.
[16] Moreno R G, Requejo A S, Alonso A M T, et al. Shadow analysis: A method for measuring soil surface roughness[J]. Geoderma, 2008, 146(1/2): 201-208.
[17] Denis A, Stevens A, Van Wesemael B, et al. Soil organic carbon assessment by field and airborne spectrometry in bare croplands: accounting for soil surface roughness[J]. Geoderma, 2014, 226/227(4): 94-102.
[18] Oelze M L, Sabatier J M, Raspet R. Roughness measurements of soil surfaces by acoustic backscatter[J]. Soil Science Society of America Journal, 2003, 67(1): 241-250.
[19] Aubert M, Baghdadi N, Zribi M, et al. Analysis of TerraSAR-X data sensitivity to bare soil moisture, roughness, composition and soil crust[J]. Remote Sensing of Environment, 2011, 115(8): 1801-1810.
[20] Lu Z X, Nan C, Perdok U D, et al. Characterisation of soil profile roughness[J]. Biosystems Engineering. 2005, 91(3): 369-377.
[21] Mattia F. On the soil roughness parameterization problem in soil moisture retrieval of bare surfaces from synthetic aperture radar[J]. Sensors, 2008, 8(7): 4213-4248.
[22] Jesús álvarez-Mozos, Verhoest N E C, Larranaga A, et al. Influence of surface roughness spatial variability and temporal dynamics on the retrieval of soil moisture from SAR observations[J]. Sensors, 2009, 9(1): 463-489.
[23] Zheng X M, Zhao K, Li X J, et al. Improvements in farmland surface roughness measurement by employing a new laser scanner[J]. Soil and Tillage Research, 2014, 143: 137-144.
[24] Haubrock S N, Kuhnert M, Chabrillat S, et al. Spatiotemporal variations of soil surface roughness from in-situ laser scanning[J]. Catena, 2009, 79(2): 128-139.
[25] 田波平,廖庆喜,黄海东,等. 2BFQ-6型油菜精量联合直播机的设计[J]. 农业机械学报,2008,39(10):211-213. Tian Boping, Liao Qingxi, Huang Haidong, et al. Design of 2BFQ-6 precision planter for rapeseed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(10): 211-213. (in Chinese with English abstract)
[26] 吴明亮,官春云,汤楚宙,等. 2BYF-6型油菜免耕直播联合播种机田间试验研究[J]. 农业工程学报,2007,23(11):172-175. Wu Mingliang, Guan Chunyun, Tang Chuzhou, et al. Experimental research on 2BYF-6 type no-tillage rape combine seeder in paddy stubble field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23 (11): 172-175. (in Chinese with English abstract)
[27] 华中农业大学. 稻茬田油菜免耕精量直播机:中国专利,201810178346. 9[P]. 2018-11-02.
[28] Nyquist H. Certain topics in telegraph transmission theory[J]. Transactions of the American Institute of Electrical Engineers, 1928, 47(2): 617-644.
[29] Philip M, Moritz S, Ralf L. Decomposing dual scale soil surface roughness for microwave remote sensing applications[J]. Remote Sensing, 2012, 4(7): 2016-2032.
[30] Bretar F, Arab-Sedze M, Champion J, et al. An advanced photogrammetric method to measure surface roughness: Application to volcanic terrains in the Piton de la Fournaise, Reunion Island[J]. Remote Sensing of Environment, 2013, 135: 1-11.
[31] 李晓洁,赵凯,郑兴明. 基于激光三角法的地表粗糙度测试仪的研制[J]. 农业工程学报,2012,28(8):116-121. Li Xiaojie,Zhao Kai,Zheng Xingming. Development of surface roughness tester based on laser triangulation method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(8): 116-121. (in Chinese with English abstract)
[32] 秦宽,丁为民,方志超,等. 复式耕整机耕深与耕宽稳定性分析与试验[J]. 农业工程学报,2016,32(9):1-8. Qin Kuan, Ding Weimin, Fang Zhichao, et al. Analysis and experiment of tillage depth and width stability for plowing and rotary tillage combined machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(9): 1-8. (in Chinese with English abstract)
Measurement and analysis of surface roughness of rapeseed mechanized direct seeding operation
Liu Lichao1, Zhang Qingsong1,2, Xiao Wenli1,2, Wei Guoliang1, Gao Liping1, Liao Qingxi1,2※
(1.,,430070,;2,,430070,)
The quality of seedbed after seeding such as soil surface leveling, soil-breaking rate and seed furrow preparing and so on, are the main factors affecting the seedling rate of rapeseed. A good seedbed is a necessary condition for uniform seedling emergence, increasing the rate of subsequent seedlings and promoting the homogeneity of plants after sowing. In view of the fact that the measurement and data processing methods of rapeseed seedbed surface roughness under mechanized direct seeding cannot fully reflect the real soil surface condition, a method of measuring and quantifying roughness surface area by using laser radar scanning technology is proposed in this paper. The main components of the measuring device are the lidar, linear guide, stepper motor, portable computer and other components. The device can quickly acquire soil surface data in three dimensions through the whole working width of direct seeding machine. The surface roughness data of rapeseed combined direct seeder and no-tillage direct seeder after operation were used to detect the effect of two kinds of seedbed operation on seedbed surface. The characteristics of rapeseed direct seeding process were analyzed, three-dimensional digital modeling and detrend processing of ground data after two kinds of direct seeders were carried out by using MATLAB. The least square method was utilized to eliminate the inclined tendency of seedbed surface, the fourth order polynomial was applied to remove the slope trend in the width direction of the soil surface of rapeseed combined direct seeder. The root mean square (RMS) height and the correlation length were involved as evaluating parameters to analyze the data. Statistical results of roughness parameters for different spatial sampling intervals and different angles cross-section data showed that the average RMS height and RMS height mean error of 170 mm sampling interval were all higher than that of 5 mm sampling interval, the average RMS height of the 170 mm sampling interval was 2.2 mm higher than that of the 5 mm sampling interval, the corresponding correlation length was around 1.8 times the latter; and the RMS height and the correlation length error of the 170 mm sampling interval were higher than that of the 5 mm sampling interval. The maximum difference of RMS height and correlation length of surface elevation data were 7.69 and 25.14 mm respectively in the three directions of 0, 45 and 90 degrees in the forward direction of vertical unit, and there was obvious anisotropy on the surface of seedbed with structural characteristics such as seed trench. Statistical results of local roughness quantification using sliding sampling windows in different size regions showed that when the window width is 0.5 times the compartment width, the standard deviation of RMS height can be stabilized within 0.27 mm if the length of the window is not less than 1.2 m, and the influence of local surface tilt on the roughness calculation can be eliminated by the trend treatment of the tilt of each sampling window. The results can provide reference for the measurement and quantitative analysis of surface roughness in rape direct seeding operation.
soils; roughness; laser radar; rapeseed mechanized direct seeding; characteristic analysis
2019-04-22
2019-06-04
公益性行业(农业)科研专项(201503118-06);国家油菜产业技术体系专项(CARS-12);湖北省农业科技创新行动项目
刘立超,博士生,主要从事农业装备设计与测控研究, Email:llchao2012@163.com
廖庆喜,教授,博士生导师,主要从事油菜机械化生产技术与装备研究,Email:liaoqx@mail.hzau.edu.cn
10.11975/j.issn.1002-6819.2019.12.005
S237
A
1002-6819(2019)-12-0038-10
刘立超,张青松,肖文立,魏国粱,高丽萍,廖庆喜. 油菜机械直播作业厢面地表粗糙度测量与分析[J]. 农业工程学报,2019,35(12):38-47. doi:10.11975/j.issn.1002-6819.2019.12.005 http://www.tcsae.org
Liu Lichao, Zhang Qingsong, Xiao Wenli, Wei Guoliang, Gao Liping, Liao Qingxi. Measurement and analysis of surface roughness of rapeseed mechanized direct seeding operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(12): 38-47. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.12.005 http://www.tcsae.org
