某品牌电动葫芦行走机构在汽车厂的应用性改造
2019-06-30周小川
周小川
【摘 要】上汽通用五菱汽车股份有限公司某侧围生产线采用某品牌电动葫芦吊运,通过对现用电动葫芦和生产线使用环境的分析,提出了某品牌电动葫芦行走机构的提速方案,根据最佳方案对某品牌电动葫芦行走机构进行改造验证,某电动葫芦行走速度从28 m/min提速至35 m/min。文章经过详细的研究分析,提供了一种改造方案,通过改造的方式弥补设备出厂短板,对其他类似需求的改造具有一定的参考价值。
【关键词】电动葫芦;行走机构;设备改造
【中图分类号】TH211.3 【文献标识码】A 【文章编号】1674-0688(2019)11-0118-02
1 背景
因市场及生产需求,上汽通用五菱汽车股份有限公司某侧围生产线生产节拍计划由20 JPH提升至40 JPH。在项目推进过程中,有4台电动葫芦最快行走速度无法满足节拍要求,形成瓶颈,人员操作、工艺等方面已无法提速,只能从电动葫芦寻找突破口。咨询某电动葫芦供应商后,得到的答复是其生产的电动葫芦行走机构最快行走速度为28 m/min,已经是各品牌相同规格行走机构的最快速度,无法提速。供应商提供的行走速度为额定负载下最高行走速度,此规格电动葫芦的额定负载为0.8 T,而侧围电动葫芦的实际负载仅为0.2 T,意味着行走电机的实际功率未达到额定功率,在保证安全和设备正常运行的前提下对速度进行提升,可能就是解决项目提速瓶颈的突破口。因此,需要对整套电动葫芦进行详细的分析、对比。
2 额定载荷与非额定载荷下的理论速度
2.1 忽略电动葫芦启动的过程和吊具摆动造成的影响
额定载荷下,当电动葫芦做匀速直线运动时,行走机构提供的牵引力F额大小等于所受滚动摩擦力f额,方向相反。
F额=f额=μN额
其中,μ为行走轮与轨道的滚动摩擦系数,是常数;N额等于整套电动葫芦、吊具、车体所受的总重力,为800 kg。
行走机构输出功率:
P额= F额×V额
其中,V额=28 m/min。
非额定载荷下,当电动葫芦做匀速直线运动时,行走机构提供的牵引力F非的大小等于所受滚动摩擦力f非,方向相反。
F非=f非=μN非
其中,μ为行走轮与轨道的滚动摩擦系数,是常数;N非等于整套电动葫芦、吊具、车体所受的总重力,为200 kg。
行走机构输出功率:
P非=F非×V非
由于行走机构的速度是恒定的,所以V非=V额=28 m/min;如果通过更改结构,把行走机构的速度加快,则行走机构输出功率相应增大,当P非=P额时:
V非====112 m/min
2.2 电动葫芦行走机构启动过程
可以将整个启动过程优化为匀加速的直线运动,加速时间为0.5 s,行走机构提供的牵引力:
F=ma
其中,m为整套电动葫芦、吊具、车体的总重量,a为行走加速度。
电动葫芦行走电机的功率、扭矩、输出转速的关系:
T=9 549 p/n
其中,T为行走电机输出扭矩,P为行走电机输出功率,n为电机输出转速,为常数。
当行走电机输出功率保持额定功率时,输出扭矩T恒定,电机输出齿轮受力恒定,是安全可靠的,行走机构的牵引力是通过更改减速器传动比增大的,在保证减速箱各零部件强度的情况下,不会对行走电机造成影响。
但是由于加速时间一样,最终速度越快,加速度越大,则吊具的摆动幅度越大,且可能因为需求的驱动力过大而产生打滑,增加启动时间,而且电动葫芦厂家未提供行走电机的详细参数,因此只能根据现场使用情况和正常情况下的吊具摆动幅度进行估算,在不考虑行走机构减速器机械机构的情况下,最高行走速度提速幅度应不大于50%,即不超过42 m/min。
3 电动葫芦行走机构的结构及更改方案选择
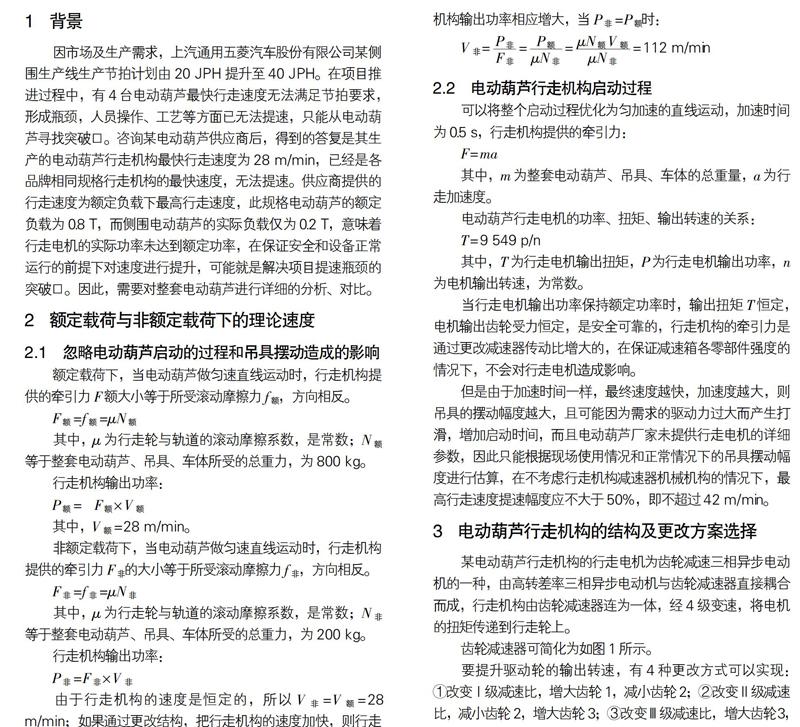
某电动葫芦行走机构的行走电机为齿轮减速三相异步电动机的一种,由高转差率三相異步电动机与齿轮减速器直接耦合而成,行走机构由齿轮减速器连为一体,经4级变速,将电机的扭矩传递到行走轮上。
齿轮减速器可简化为如图1所示。
要提升驱动轮的输出转速,有4种更改方式可以实现:①改变Ⅰ级减速比,增大齿轮1,减小齿轮2;②改变Ⅱ级减速比,减小齿轮2,增大齿轮3;③改变Ⅲ级减速比,增大齿轮3,减小齿轮4;④改变Ⅳ级减速比,减小齿轮5,增大驱动轮。
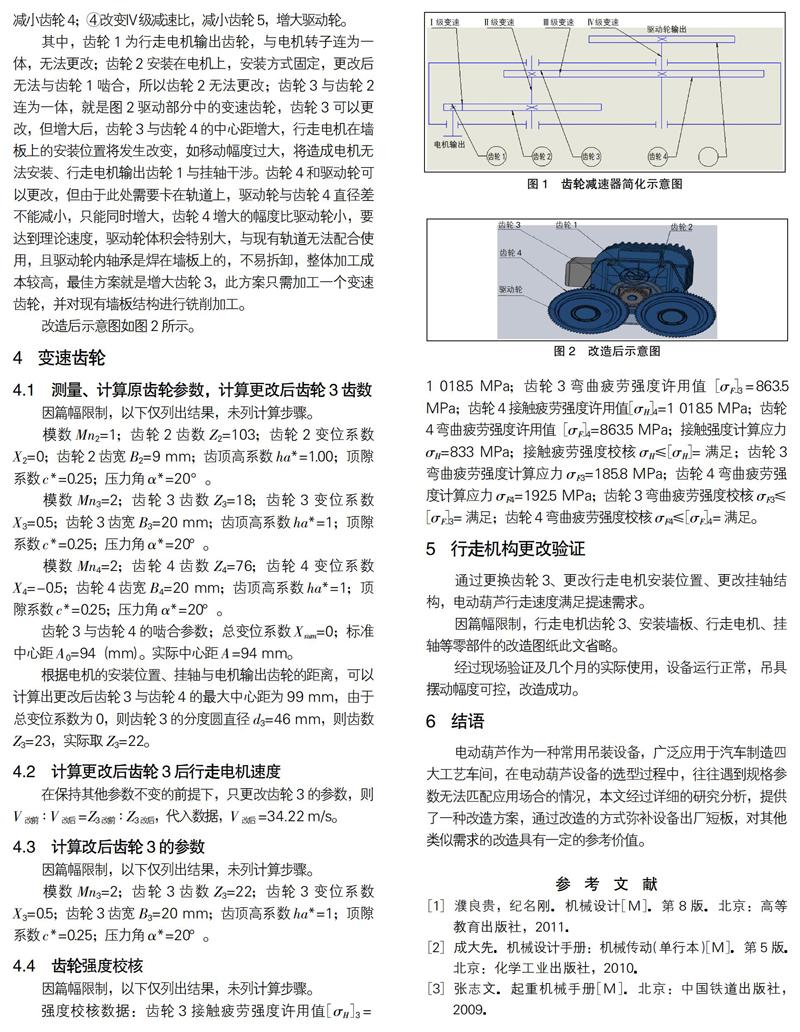
其中,齿轮1为行走电机输出齿轮,与电机转子连为一体,无法更改;齿轮2安装在电机上,安装方式固定,更改后无法与齿轮1啮合,所以齿轮2无法更改;齿轮3与齿轮2连为一体,就是图2驱动部分中的变速齿轮,齿轮3可以更改,但增大后,齿轮3与齿轮4的中心距增大,行走电机在墙板上的安装位置将发生改变,如移动幅度过大,将造成电机无法安装、行走电机输出齿轮1与挂轴干涉。齿轮4和驱动轮可以更改,但由于此处需要卡在轨道上,驱动轮与齿轮4直径差不能减小,只能同时增大,齿轮4增大的幅度比驱动轮小,要达到理论速度,驱动轮体积会特别大,与现有轨道无法配合使用,且驱动轮内轴承是焊在墙板上的,不易拆卸,整体加工成本较高,最佳方案就是增大齿轮3,此方案只需加工一个变速齿轮,并对现有墙板结构进行铣削加工。
改造后示意图如图2所示。
4 变速齿轮
4.1 测量、计算原齿轮参数,计算更改后齿轮3齿数
因篇幅限制,以下仅列出结果,未列计算步骤。
模数Mn2=1;齿轮2齿数Z2=103;齿轮2变位系数X2=0;齿轮2齿宽B2=9 mm;齿顶高系数ha*=1.00;顶隙系数c*=0.25;压力角α*=20°。
模数Mn3=2;齿轮3齿数Z3=18;齿轮3变位系数X3=0.5;齿轮3齿宽B3=20 mm;齿顶高系数ha*=1;顶隙系数c*=0.25;压力角α*=20°。
模数Mn4=2;齿轮4齿数Z4=76;齿轮4变位系数X4=-0.5;齿轮4齿宽B4=20 mm;齿顶高系数ha*=1;顶隙系数c*=0.25;压力角α*=20°。
齿轮3与齿轮4的啮合参数;总变位系数Xsum=0;标准中心距A0=94(mm)。实际中心距A=94 mm。
根据电机的安装位置、挂轴与电机输出齿轮的距离,可以计算出更改后齿轮3与齿轮4的最大中心距为99 mm,由于总变位系数为0,则齿轮3的分度圆直径d3=46 mm,则齿数Z3=23,实际取Z3=22。
4.2 计算更改后齿轮3后行走电机速度
在保持其他参数不变的前提下,只更改齿轮3的参数,则V改前∶V改后=Z 3改前∶Z 3改后,代入数据,V改后=34.22 m/s。
4.3 计算改后齿轮3的参数
因篇幅限制,以下仅列出结果,未列计算步骤。
模数Mn3=2;齿轮3齿数Z3=22;齿轮3变位系数X3=0.5;齿轮3齿宽B3=20 mm;齿顶高系数ha*=1;顶隙系数c*=0.25;压力角α*=20°。
4.4 齿轮强度校核
因篇幅限制,以下仅列出结果,未列計算步骤。
强度校核数据:齿轮3接触疲劳强度许用值[σH]3=1 018.5 MPa;齿轮3弯曲疲劳强度许用值[σF]3=863.5 MPa;齿轮4接触疲劳强度许用值[σH]4=1 018.5 MPa;齿轮4弯曲疲劳强度许用值[σF]4=863.5 MPa;接触强度计算应力σH=833 MPa;接触疲劳强度校核σH≤[σH]=满足;齿轮3弯曲疲劳强度计算应力σF3=185.8 MPa;齿轮4弯曲疲劳强度计算应力σF4=192.5 MPa;齿轮3弯曲疲劳强度校核σF3≤[σF]3=满足;齿轮4弯曲疲劳强度校核σF4≤[σF]4=满足。
5 行走机构更改验证
通过更换齿轮3、更改行走电机安装位置、更改挂轴结构,电动葫芦行走速度满足提速需求。
因篇幅限制,行走电机齿轮3、安装墙板、行走电机、挂轴等零部件的改造图纸此文省略。
经过现场验证及几个月的实际使用,设备运行正常,吊具摆动幅度可控,改造成功。
6 结语
电动葫芦作为一种常用吊装设备,广泛应用于汽车制造四大工艺车间,在电动葫芦设备的选型过程中,往往遇到规格参数无法匹配应用场合的情况,本文经过详细的研究分析,提供了一种改造方案,通过改造的方式弥补设备出厂短板,对其他类似需求的改造具有一定的参考价值。
参 考 文 献
[1]濮良贵,纪名刚.机械设计[M].第8版.北京:高等教育出版社,2011.
[2]成大先.机械设计手册:机械传动(单行本)[M].第5版.北京:化学工业出版社,2010.
[3]张志文.起重机械手册[M].北京:中国铁道出版社,2009.
