基于迭代无偏有限冲击响应滤波的共轴跟踪技术研究
2019-06-27余潇柯芳袁佳高歆杨
余潇, 柯芳, 袁佳, 高歆杨
(西南技术物理研究所, 四川 成都 610041)
0 引言
对于高精度自动光电跟踪系统,为了减小动态滞后误差,通常采用复合控制的方案[1]。共轴跟踪是等效复合控制的一种完善形式[2],它把控制回路分割成目标跟踪与伺服随动两部分,可彼此独立设计。目标跟踪环节实现目标位置与速度的状态预测;伺服随动环节以位置预测量为参考输入、以速度预测量为前馈输入完成复合控制。由于实现了复合控制并用位置预测补偿了脱靶量时滞,系统跟踪性能大为改善[3]。
为实现复合控制,文献[3]提出一种人为延迟编码器输出信息再与脱靶量合成,通过卡尔曼滤波(KF)外推来补偿脱靶量时滞并实现前馈的方法;文献[4]将低速率的位置给定信息分别进行插值细分和滤波,通过高增益微分器和KF预测得到了转台速度和加速度的估计;文献[5]采用了基于状态参数双重扩展KF估计的共轴跟踪方案;文献[6-8]采用自适应滤波技术实现了对目标状态信息的估计,在噪声先验统计信息准确的前提下得到了理想效果。
在以上方法中,状态预测均采用了传统KF及其衍生算法,故难以摆脱KF算法依赖噪声先验统计信息和状态初始值的局限。在实际应用中,噪声统计信息通常无法事先获得,或已知的统计信息不准确,导致状态预测产生误差,直接影响共轴跟踪实现的效果,使得系统实际跟踪精度无法达到理论设计水平。
本文针对上述问题,采用一种新型迭代无偏有限冲击响应(UFIR)滤波算法替代传统KF算法,实现对共轴跟踪方案中状态预测环节的改进。由于迭代UFIR滤波算法不需要噪声先验统计信息的参与,不依赖状态初始设定值,仅需要一定窗长的历史量测数据就能获得较为理想的预估结果,从原理上弥补了KF算法的不足,因此改进后的系统具有更好的鲁棒性和更高的工程应用价值[9-10]。
1 复合控制与共轴跟踪系统
1.1 脱靶量滞后对光电跟踪的影响
在光电跟踪系统中通常采用基于电荷耦合器件(CCD)的探测器来获取目标图像信息。由于信号提取和处理需要一定的时间积累,导致输出的目标脱靶量存在一定程度的滞后。若考虑探测器为纯时滞环节,则光电跟踪系统被校正为典型Ⅱ型系统时,其传递函数可表示为
(1)
式中:K为系统开环放大倍数;T1、T2为时间常数;s为拉普拉斯算子;τ0为脱靶量滞后时间。则可得到对应的探测器环节幅频特性为
(2)
相频特性为
(3)

(4)
ωCτ0=α.
(5)
由(5)式可知,系统开环截止频率ωC与脱靶量时滞τ0呈反比,脱靶量时滞越大,开环截止频率越低,跟踪动态性能也越差。因此必须补偿脱靶量滞后,以减小其对系统跟踪精度的不利影响。
1.2 等效复合控制与共轴跟踪原理
在控制系统中,同时采用前馈控制和反馈控制的方法被称为复合控制,如图1所示。其中:Gf(s)为前馈环节传递函数;Gp(s)为位置控制器传递函数;Gv(s)为速度控制器传递函数;G0(s)为对象的等效传递函数;1/s为积分环节;R(s)、C(s)、E(s)分别为控制系统的输入、输出以及误差信号的拉普拉斯变换。
在控制系统中加入前馈,引入参考输入信号的1阶或高阶导数,能提高系统的无差度,在大幅度提升跟踪精度的同时不影响系统的稳定性。然而在自动光电跟踪实际工程中,往往不能直接获得目标速度、加速度等高阶信息,也就无法直接进行前馈引导。因此通常采用等效复合控制技术,通过状态估计获得高阶状态信息,进而实现复合控制。
在共轴跟踪方案中,通过人为延迟编码器输出信息再与脱靶量结合,进而采用状态预测技术得到较为准确的目标当前位置和速度的信息,能有效补偿脱靶量滞后,从而提高系统的跟踪精度。其实现原理是将整个光电跟踪回路分割成目标跟踪与伺服随动两个独立环节进行设计:目标跟踪部分由计算机完成状态估计和预测,提供目标当前位置和速度等信息,补偿脱靶量时滞;伺服随动部分接收位置参考量和速度前馈信息,完成复合控制。

1.3 共轴跟踪改进方案设计
由于传统共轴跟踪方案中状态预测环节采用的KF算法依赖噪声先验统计信息,在实际工程应用中存在局限。为增强其工程适用性,本文设计了一种共轴跟踪改进方案,提出采用迭代UFIR滤波算法替代传统的KF算法进行状态估计与预测。迭代UFIR滤波算法不依赖噪声先验统计信息,可有效克服传统KF算法的不足,在噪声统计信息未知时仍能保持理想的预测精度,从而使改进后的系统在实际工况下也能达到较高的跟踪精度。
以自动光电跟踪系统为对象设计的共轴跟踪改进方案框图如图3所示。
图3中:伺服随动部分为典型三环系统;状态预测部分的设计则包含坐标系选择、目标运动模型建立和预测算法3个关键环节,其详细设计如下文所述。
在目标跟踪问题中,状态预测的实现建立在目标运动模型的基础上,而运动模型的建立又与坐标系的选择有关。在光电跟踪系统中,目标的量测信息通常在极坐标系下获得,为了避免坐标转换和量测数据耦合带来的问题复杂化,本文选择在极坐标系下建立目标模型。而在极坐标系中,目标在空间中简单的直线运动也会变成复杂的变速运动[3],因此有必要建立机动性较强的目标运动模型。考虑到计算复杂性和系统实时性的要求,本文采用2阶模型,即常加速度(CA)模型。后续仿真结果也表明,CA模型已能满足跟踪精度需求。下面给出模型设计。
在线性时不变(LTI)系统中,离散的状态方程可表示为
(6)

(7)
式中:T为光电探测器的采样周期。量测数据是编码器输出的转轴位置与脱靶量融合得到的目标位置量,维数等于1,故量测矩阵为Hn=[1 0 0].
预测算法采用迭代UFIR滤波算法。该算法仅使用一定窗长的历史量测数据就能得到较理想的预估结果,其详细实现将在2.2节中给出。
2 状态预测算法的设计
2.1 KF算法
KF算法是线性高斯条件下的最优状态估计方法,自建立以来广泛用于各领域的状态估计问题中。扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)等适用于非线性问题的算法又进一步拓展了KF算法的使用范围。本文中目标运动模型为线性的CA模型,因此可直接使用标准KF算法。其离散形式的递推方程为
(8)
从递推方程(8)式也可以看出,KF算法要求已知噪声的统计特性矩阵Qn和Rn,且目标状态的递推也依赖初始值设定。当噪声统计信息不准确时,估计效果将大打折扣,严重时还会引起系统发散。
2.2 迭代UFIR滤波算法
由于KF算法的不足,本文采用一种鲁棒性更强的迭代UFIR滤波算法来设计共轴跟踪的状态预测环节。UFIR滤波算法最早由Shmaliy提出[11],此后最优有限冲击响应(OFIR)滤波和迭代UFIR滤波等一系列状态估计算法相继问世[12-15]。基本UFIR滤波器又称为批处理UFIR滤波器,其核心思想是通过最近的N个历史量测数据来估计目标当前时刻的状态,N又被称为记忆窗长。UFIR滤波算法首先满足如下无偏性条件:
E(n)=E(xn).
(9)
(9)式意味着状态估计的均值等于真实状态均值。在基于(6)式所示的线性系统下,令Fn=Fn,n-1,则满足(9)式的UFIR滤波算法可表示为
(10)
式中:m=n-N+1;扩张量测向量Zm,n和映射矩阵Cm,n分别为
(11)
(12)
(13)
从(10)式可看出,批处理UFIR滤波算法需一次性处理m到n时刻的N个量测数据。而N的增大将引起向量Zm,n和矩阵Cm,n维数的增大,使得算法计算量骤增,不适合在实时性要求较高的跟踪系统中使用。迭代UFIR滤波算法则能较好地缓解这一问题。本文采用的迭代UFIR滤波算法表达形式为
(14)

(15)
(16)
Gl为l时刻的广义噪声功率增益(GNPG)。为了启动迭代算法,需要通过一个批处理UFIR滤波器得到迭代状态初始值和广义噪声功率增益初始值,表示为
(17)
(18)
此批处理UFIR滤波的窗长值等于系统状态向量的维度K,且有s=m+K-1. 迭代过程从迭代变量l=m+K时刻开始,在l=n时刻结束,从而得到系统n时刻状态估计值其算法实现如表1所示。同理,当Fn+k=Fn+k,n时,可结合当前状态估计值n,通过状态方程预测得到n+k.
由UFIR滤波算法表达式可知,该算法递推过程不需要噪声统计特性矩阵Qn和Rn的参与,也无需假定初始状态值和协方差矩阵。唯一的可调参数为窗长N,为最小化估计值的均方根误差,N必须取最优值Nopt,可结合量测数据通过最小化残差均方矩阵迹的导数求出,从而避免了先验假定[13]。Nopt的取值可由(19)式得到:
(19)
式中:
Ln=E{(zn-Hn×n)×(zn-Hn×n)T}.
(20)
迭代UFIR滤波算法的本质是一种有限记忆状态估计算法,与传统KF算法的无限记忆特性相比,不会存在数据饱和现象。迭代UFIR滤波算法的基本特性使得其比传统KF算法具有更好的鲁棒性和工程应用价值。表1中给出了迭代UFIR滤波算法的实现步骤。

表1 迭代UFIR滤波算法
3 仿真实验研究
3.1 仿真目的及背景条件
为了验证迭代UFIR滤波算法相对传统KF算法在状态预测性能上的优势及其对提升共轴跟踪系统跟踪精度的贡献,开展两类仿真实验:首先进行两种状态预估算法性能对比的单元仿真实验;在此基础上进行系统级仿真实验,将两种算法分别应用于共轴跟踪系统,考察其对提升系统跟踪精度发挥的作用,并重点比较工程应用背景下的实际光电跟踪系统在采用两种不同算法时的性能优劣。

3.2 状态预测算法对比单元仿真实验
在两种状态预测算法对比的单元仿真实验中,基于上文所建立的CA模型,分别在噪声已知和噪声未知的条件下对KF及迭代UFIR算法进行100次蒙特卡洛仿真,计算目标位移和速度预测的均方根误差。同时对两种算法在目标机动增强时的预测性能进行仿真,比较位移和速度预测的误差收敛快慢,结果如图4所示。

图4(a)表明,当噪声统计特性已知或估计准确时,由于KF算法在线性高斯条件下最优,预测精度较好,而迭代UFIR滤波算法在取最优窗长时与KF算法位置预测精度相当,速度预测精度略优于KF算法,从表2的统计数据可知较KF算法提高了0.88%. 图4(b)表明当噪声不准确或未知时,KF算法的估计误差明显增大,位置预测的误差从0.017 5 mrad增大到0.019 1 mrad,增大了9.1%,速度预测的误差从6.015 mrad/s增大到6.357 mrad/s,增大了5.7%,而迭代UFIR滤波算法由于迭代过程中不需要噪声统计特性矩阵的参与,位置和速度都保持了原有的预测精度,表现出了对噪声更强的鲁棒性。图4(c)表明仿真模拟目标机动增强时,两种算法的预估误差都骤增,但可明显看出迭代UFIR滤波算法相比KF算法预估误差收敛速度更快、过渡时间更短。仿真中当位置估计误差重新收敛至约0.02 mrad量级时,两种算法花费的时间分别为tKF=0.124 s、tUFIR=0.059 s,表明后者能更快跟踪上目标。
3.3 基于两种状态预测算法的共轴跟踪系统对比仿真实验
为了进一步分析实际工程背景下两种算法对光电跟踪系统跟踪性能的不同贡献,以某型自动光电跟踪系统工程样机为研究对象,在跟踪转台伺服控制系统中分别施加两种算法,构成共轴跟踪系统,并对两个系统的跟踪性能作对比仿真。在3.1节的目标运动轨迹及前提条件下,建立了光电跟踪系统的共轴跟踪仿真模型,如图5所示,通过人为延迟编码器输出信息并与脱靶量结合得到有时滞的目标角位置信息,进而由状态预测环节得到无时滞的目标角位置、角速度估计量并选取目标角速度信息作为前馈导引,实现时滞补偿和等效复合控制。其中,跟踪误差即脱靶量取自第1个求和环节输出,框图中前馈环节为Gf=τs,τ为前馈系数。
在本文中,跟踪转台伺服系统反馈控制部分采用电流环、速度环、位置环的经典三环结构。考虑到转速变化较电流变化慢很多,在计算动态时,开环传递函数忽略反电动势反馈。电流环控制器采用PI

表2 预测算法误差
调节,按典型2阶最优校正,得到电流环与跟踪架的前向传递函数为
(21)
在电流环整定的基础上,将速度环按近似1阶惯性环节设计,等效闭环时间常数在系统中取为约20 ms,可使速度响应的上升时间和超调量都较为满意,得到速度环PI控制器为
(22)
位置跟踪回路按伺服系统工程实践中采用最多的2阶无差度伺服系统考虑,保证对等速运动输入无差。根据期望频率特性的Bode图,得到作为串联校正环节的位置环控制器为
(23)
基于以上各环节传递函数,计算求得前馈系数τ=1.
在对比仿真实验中,两个系统在跟踪转台的反馈控制部分均采用上述实际结果,仅在状态预测环节上不同,以便考察状态预测算法的差异对系统性能的影响,基于KF算法的状态预测是当前跟踪技术中普遍采用的方法。
图6所示为光电跟踪系统在不同仿真条件下的跟踪误差随时间的变化曲线,其稳态误差统计数据如表3所示。图6(a)为在无时滞条件下,无前馈补偿与加入信号真实速度前馈的理想补偿时系统跟踪误差的对比;图6(b)为脱靶量滞后2个采样周期时,无前馈和有理想前馈但无预测的系统跟踪误差对比曲线;图6(c)为使用KF算法与迭代UFIR滤波算法实现带有预测和前馈的共轴跟踪系统跟踪误差对比曲线;图6(d)为在目标机动增强时使用KF算法与迭代UFIR滤波算法的共轴跟踪系统跟踪误差对比曲线图。
图6(a)和表3的对应数据表明,在无时滞时加入理想前馈能使系统跟踪误差呈数量级地降低;从图6(b)和表3的数据可知,在无前馈时由于脱靶量滞后导致的系统跟踪误差比不存在滞后时扩大了近10倍,此时即使加入理想前馈,但由于没有预测,也不能有效改善系统的跟踪性能,表明脱靶量时滞已经极大地影响了系统跟踪精度的提升;从图6(c)、图6(d)和表3的结果可知,采用基于KF算法和迭代UFIR滤波算法的共轴跟踪方案,系统的跟踪精度都得到了明显提高,接近无时滞且有理想前馈作用时的跟踪精度值,证明了基于KF算法和迭代UFIR滤波算法的共轴跟踪技术通过状态预测减小了脱靶量滞后的影响并实现了前馈补偿,使系统跟踪精度得到有效提升,近似达到了理想情况。此外,还可知当噪声先验信息不准确时,基于迭代UFIR滤波算法的共轴跟踪系统保持了原有的跟踪误差(最大值0.247 mrad、均方根值0.091 mrad),而基于KF算法的系统由于对噪声先验信息敏感,其稳态最大误差从0.262 mrad增加到0.414 mrad,接近于成倍上升,均方根误差从0.082 mrad增加到0.117 mrad;图6(d)表明当目标机动增强时,基于迭代UFIR滤波算法的系统相比使用KF算法,跟踪误差收敛更快,与3.2节中迭代UFIR滤波算法和KF算法在目标发生机动时算法自身预估误差收敛规律一致。由于在实际工程应用中,往往无法准确获知噪声的先验统计信息和目标机动信息,上述仿真实验的结果证明了工程应用背景下采用基于迭代UFIR滤波算法的共轴跟踪方案较基于KF算法的方案,对提高光电跟踪系统跟踪精度的贡献更为显著、鲁棒性更好。
4 结论
本文针对高精度光电跟踪系统亟待减小动态滞后误差的需求,设计了一种共轴跟踪的改进方案。采用一种新型迭代UFIR滤波算法替代传统KF算法进行状态估计与预测,得到了较理想的结果,提高了共轴跟踪方案在工程应用中的适应性。得到主要结论如下:
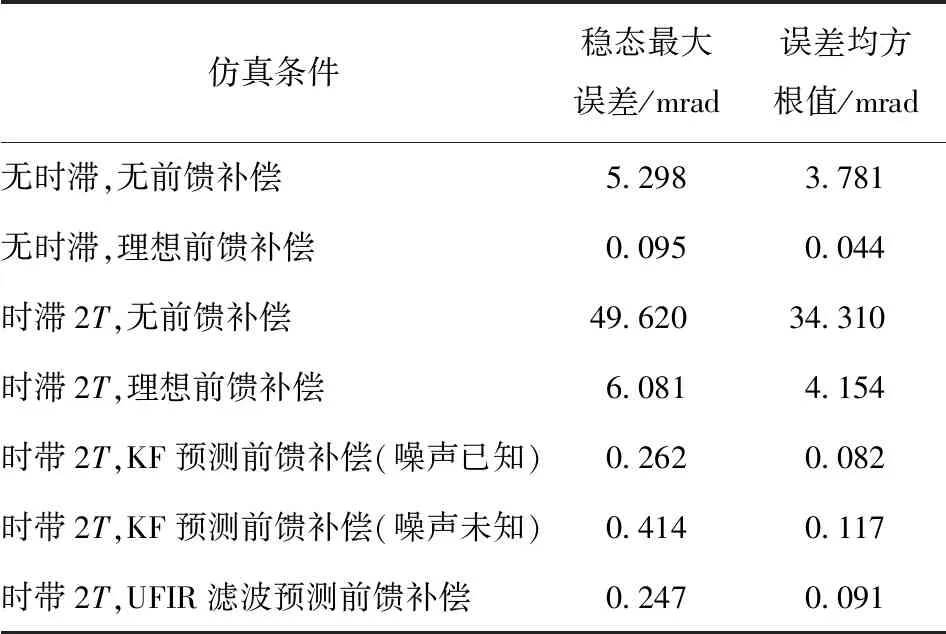
仿真条件稳态最大误差/mrad误差均方根值/mrad无时滞,无前馈补偿5.2983.781无时滞,理想前馈补偿0.0950.044时滞2T,无前馈补偿49.62034.310时滞2T,理想前馈补偿6.0814.154时带2T,KF预测前馈补偿(噪声已知)0.2620.082时带2T,KF预测前馈补偿(噪声未知)0.4140.117时带2T,UFIR滤波预测前馈补偿0.2470.091
1) 迭代UFIR滤波算法与理想条件下的KF算法估计精度相当,并且具有不依赖噪声先验统计信息的优势,在噪声先验信息未知的情况下比KF类方法有更强的鲁棒性。同时,在目标机动增强时,迭代UFIR滤波算法过渡时间更短,误差衰减更快,追踪效果更好。
2) 时滞严重阻碍跟踪精度的提升。共轴跟踪方案通过状态预测提供了伺服控制所需较准确的目标位置量和速度量,补偿了探测器脱靶量滞后,并实现了等效复合控制,显著提高了系统的跟踪精度。
3) 在共轴跟踪方案中,采用迭代UFIR滤波算法比采用传统KF算法在噪声先验信息未知的情况下系统跟踪误差更小、在目标机动增强时系统跟踪误差收敛更快。由于实际工程应用中上述两种情况普遍存在,基于迭代UFIR滤波的共轴跟踪方案具有更大的工程应用潜力。
