自走式斗轮薯类收获机结构设计研究
2019-06-11黄世明冯天玉石义栋陆伟安程捷郝文彬
黄世明 冯天玉 石义栋 陆伟安 程捷 郝文彬


摘要:对自走式斗轮薯类收获机的原理、结构组成进行探讨,并对收获机的主要零部件的结构、参数进行了研究,提出了设计要求,旨在为自走式斗轮薯类收获机的后续研究设计提供参考。
关键词:薯类;斗轮体;铲斗;清选瓦栅
中图分类号:S225.7+1 文献标识码:A
文章编号:0439-8114(2019)01-0117-03
DOI:10.14088/j.cnki.issn0439-8114.2019.01.028 开放科学(资源服务)标识码(OSID):
Research on Structure Design of Self-propelled Bucket Wheel Potato Harvester
HUANG Shi-ming,FENG Tian-yu,SHI Yi-dong,LU Wei-an,CHENG Jie,HAO Wen-bin
(Hubei University of Technology,Wuhan 430068,China)
Abstract: The principle and structure of the self-propelled bucket wheel potato crop harvester are discussed. The structural forms and parameters of the main components of the harvester are studied. The design requirements are proposed. It is a self-propelled bucket wheel potato. The follow-up study design of the crop harvester provides a reference.
Key words: potato block; bucket wheel; bucket; cleaning tile
薯类作物主要有马铃薯、甘薯、木薯、芋类等, 中国是世界上薯类种植面积最大的國家[1]。因其各自生长环境(土壤的干湿度)、结茎土层深度不同,薯类作物的收获目前仍以人工、半机械为主,薯块损失、损伤大,劳动强度大,生产效率低;自走式斗轮薯类收获机是一种创新设计,可实现多种块茎的统一收获。
1 结构和工作原理
1.1 总体结构
所设计的收获机主要由行走底盘、斗轮体、铲斗、清选瓦栅、输送带、升降臂、收集仓等组成。如图1所示。
1.2 工作原理
铲斗将薯块、土垡掘取,部分泥土从铲斗底部的隔栅漏出,薯块随斗轮体旋转上升,通过清选瓦栅进一步清选。薯块达到清选瓦栅顶部后,在重力作用下顺清选瓦栅的溜道滑入输送带,输送带将薯块送入收集仓,实现薯块收获的全过程。
2 主要零部件及参数
2.1 底盘
底盘是各工作部件的承载体,本机采用轮式结构。便于机械整体平衡和作业部件安装,动力装置安装在底盘后部。前后轮距1 400~1 500 mm,可根据种植作物的垄宽适当调节, 机具行驶在垄沟中,不造成对薯块的损伤。提升臂与底盘的挂接点位于两轴距内。由于前行走轮、铲斗与地面接触,底盘采用后轮转向,利于湿地的通过性能和越障能力。底盘采用四轮驱动,离地间隙大于250 mm。
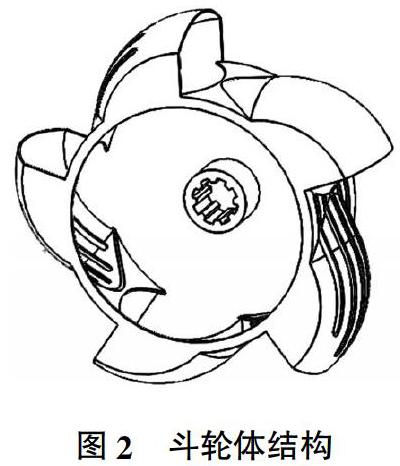
2.2 斗轮体
斗轮体的结构如图2所示。斗轮体是由钢板焊接成的圆柱体, 圆柱体上均匀分布若干个缺口与铲斗对接。具有如下功能: 动力输入轴与铲斗之间刚性连接,并传递这些部件之间的所有力和力矩;将掘取的薯块和泥土混合物转运至输送带装置上;将输入的旋转运动传递到铲斗。
斗轮体腹板设计在圆柱体的一端, 清选瓦栅筛出的泥土从另端排出斗轮体。腹板可设计成平面腹板或锥形腹板,满足结构强度的条件下,腹板可漏空出一定的空隙,减轻重量。圆柱体另一端焊30 mm高的环形衬板,与清选瓦栅、铲斗形成空间,避免薯块外溢,并能提高斗轮体结构。
圆柱体高度可根据铲斗宽度决定,小于铲斗宽度。圆柱体直径根据铲斗个数确定。
2.3 铲斗
2.3.1 铲斗结构 铲斗结构如图3所示,由斗底、斗唇、斗耳焊接而成,铲斗通过斗唇、斗座上的销轴固定在斗轮体上。铲斗是冲压或焊接而成的金属结构件,斗底做成栅条状,起到减小旋转扭矩和筛分部分土壤的作用;铲斗的高度从切削侧边特定的高度逐渐降低一直到铲斗与斗轮体相连接的后侧边[2]。
2.3.2 铲斗的形状 铲斗斗唇的形状可以是矩形、梯形、半圆形。图4为甘薯在垄形断面的分布,从图4中可以看出,薯块集中在垄中央。为减少取土量,斗唇设计成半圆形,且采用半圆形铲斗时,斗轮在任何位置,其切削形状和切削长度均近似相同,因此半圆形铲斗的切削刃在相同条件下性能最佳。
2.3.3 铲斗的结构设计
1)铲斗外形设计。铲斗的外形尺寸比例对铲斗工作影响很大,不仅要有利于减少薯块的损失、损伤,还要便于薯块混合物的装卸。
铲斗高度H:以不漏挖为准,增加铲斗高度可以增加切削厚度,损失减小,但挖土量增加,分离部件负荷增大,功率消耗剧增。根据薯块生长情况,铲斗高度可设计为200 mm。
铲斗宽度B:铲的宽度主要取决于薯块地下分布宽度、行距的均匀性、植株对垄中心的偏移和机器工作行驶时的偏差。一般单行马铃薯收获机的宽度不小于400 mm。单垄双行薯类收获机铲斗宽度按下式计算。
铲斗长度L:铲斗长度大有利于挖掘深度调整,但增大了斗轮体尺寸和铲斗间距,铲斗长度设计成280 mm为好。
2)斗唇刃口設计。斗唇刃口各参数是保证机器生产能力、延长使用寿命的重要因素,斗唇除应合理选材、正确设计形状和尺寸外,还应注意刃口工作时形成的各种角度[3]。否则会引起斗轮驱动功率的不必要消耗和斗唇过快磨损。刃口各角度如图3所示。γ为切削角,系切点法线(此处为斗轮中心到切削圆半径)和切削刃的内纤维所成角度;β为契形角;α为自由切削角,系切削轨迹线和切削刃外纤维所成角度;δ为切削角,δ=β+α,是铲斗投入工作时所形成的角度。
根据斗唇实物或图纸,可以判断契形角,其余各角必须视其在铲斗上的安装位置决定。切削角和自由切削角的确定,由于切削刃有内外倒角之分,所以自由切削角的形成有图5所示的3种可能。当α>0时,切削过程可以减少斗唇磨削,降低斗轮驱动功率的消耗[4]。若α角过大,则将引起切削角增大。切削角δ是切削过程中形成的,要求在斗唇铲入土层时,能保证铲斗背面最外轮廓线不与土壤相摩擦。切削角大小对挖掘过程的影响如图6所示。图6中,F为运动方向施力,同时产生与运动方向垂直的挤压力N。由于土壤外摩擦影响,正压力与摩擦力(摩擦角ψμ)的合力R沿外摩擦角方向[5]。根据测试得知,随切削角增大,正压力减小。当切削角为50°~60°时,正压力趋近于零。切削角继续增大时,正压力可能变为负值。切削刃与土壤形成的切削角低于50°时,切削力F可产生一个有助于切削机构挤入土壤的分力N。当切削角超过60°时,切削机构有从土壤中被挤出的趋势。所以,切削角不宜大于50°。当自由切削角为负值时,将形成较钝的切削角。此外,正压力N引起的摩擦力就会额外消耗驱动功率,迫使切削机构从土壤中被挤出。因此,设计斗唇切削刃时,除应有适当的自由切削角外,还应尽量采用较小的切削角。切削角过小,会引起切削刃过快磨损。所以,必须综合二者的利弊,选取适当的切削角。一般设计的自由切削角为9°~15°,切削角为25°~30°。铲斗侧面切削刃应设计为内倒角,铲斗正面切削角应设计成外倒角,以便在一定自由切削角的条件下获得较小的切削角。
2.4 清选瓦栅的研究设计
如图7所示,清选瓦栅是一个由钢管连接而成的结构件[6],镶嵌在斗轮体内作为铲斗的底衬,并设有薯块溜道。薯块和泥土混合物经过瓦栅凸面分离泥土,薯块随斗轮体输送达到溜道。为防止杂物缠绕,栅条设置与薯块的移动方向一致。为防止薯块表皮损伤,栅条可裹护软体材料。瓦栅的间隙大小随收获薯块大小不同而不同,是决定收获机损失率一个重要的因素,间隙小不利于土垡的分离,太大会出现薯块漏失。
3 小结
对自走式斗轮薯类作物收获机的原理、结构组成进行探讨,并对收获机的主要零部件的结构、参数进行了研究,提出了设计要求,旨在为自走式斗轮薯类作物收获机的后续研究设计提供参考。
参考文献:
[1] 中国农业机械化科学研究院.农业机械设计手册(下)[M].北京:中国农业科学技术出版社,2007.
[2] 宋 波.斗轮装置结构及设计要求的研究[J].露天采矿研究,2017, 32(5):42-45.
[3] 王忠利.斗轮挖掘机铲斗切削刃和斗齿工作角的设计[J].工程机械,1983(12):15-18.
[4] 郑厚贵,张周强,徐武彬,等.基于土壤压缩破坏理论的挖掘铲的设计与分析[J].农机化研究,2011,33(11):122-126,130.
[5] 李雷霞,贾晶霞,李建东,等.土壤参数与马铃薯收获机牵引阻力的研究[J].农机化研究,2013(10):125-128.
[6] 孙步功,李 辉,吴建民,等.栅条式马铃薯挖掘铲的设计与试验研究[J].甘肃农业大学学报,2013,48(3):131-135.
