单目视觉和二维激光雷达的配准与融合
2019-06-06
(浙江省杭州第二中学 浙江 杭州 310052)
一、引言
单目视觉可以实现实时跟踪检测和跟踪精度,确定相对于人体信道的横向位置,但由于透视变换的影响,在纵向距离测量中准确,存在一定的缺点。
与此相反,激光雷达能够准确地估计距离、抵抗环境变化的能力,并能提供图像无法获得的附加信息。因此,无人机应用的自适应巡航控制系统主要是利用激光雷达传感器实现的。在卡内基梅隆大学博士学位论文中,详细介绍了一种基于激光雷达的无人机探测系统。然而,这种传感器使用窄波束宽度检测在Langer面前无人机。更重要的是,激光雷达的横向分辨率低,不能直接增强对信道场景的感知,如不识别信道结构、识别障碍物、无法识别无人机是否处于当前信道等。
根据本文的背景,我们设计的融合方案是:单目视觉传感器获取信道信息,无人机单目视觉障碍信息和激光雷达传感器同时检测,信息和提取分别进行,然后综合结果,提高系统的鲁棒性。一个完美的跟踪系统应该能够回答两个问题:是否有无人机和无人机前方的障碍物。融合的目的是减少误报和泄漏报警,并提供示踪剂的距离。
本文分为两部分:融合算法的研究与仿真。在该算法中的一部分,分别研究了单目视觉传感器和激光雷达传感器信息融合算法的决策水平和决策水平的D-S证据理论的特征级信息用于确定是否有融合,目标跟踪;采用自适应加权平均法的特征级融合,目的是用示踪剂估计无人机的距离。在仿真实验部分,利用虚拟实验技术设计了虚拟实验环境,对单眼观察器和激光雷达传感器进行了仿真,并对所得自适应加权平均融合算法进行了仿真。创建虚拟实验环境克服了实验工具的客观困难,并显着降低了开发实验室算法的成本。取得了良好的效果。
二、本文算法概述
(一)传感器选择
现有的无人机实时跟踪系统主要采用有源传感器作为环境监测传感器。利用有源传感器探测无人机障碍物的基本思想是无人机的存在导致距离映射的不连续性,其优点是直接获得目标距离。
由于硬件成本的急剧下降和处理器速度的迅速提高,被动传感器在实时飞机监控领域的应用成为一个新的研究热点。本文研究了一种单目视觉传感器无源传感器,用于获取目标前方的目标图像,研究了利用图像处理技术测量距离的算法。
基于单目视觉传感器与距离传感器相结合的多传感器联合算法是一种非常有效的算法。考虑到传感器的性能,选择单目视觉和激光雷达传感器信息并融合它们是非常有意义的。也是国内外无人机技术研究的一个重要发展方向。考虑到设备成本,提出了一种毫米波激光雷达与单摄像机融合的障碍物检测方法。这是最经济的方案,因为至少需要一台照相机来检测信道标记。由于无人机在其他信道中,仅需要一个激光雷达跟踪无人机前方的无人机。
(二)两级融合算法
我们设计的融合方案是:单目视觉传感器获取信道信息,单目视觉和激光雷达传感器同时检测无人机障碍物信息。分别对信息进行了丰富和细化,并对结果进行综合,提高了系统的鲁棒性。
根据该方案,分别研究了单目视觉传感器和激光雷达传感器信息在决策层和特征层上的信息融合算法。决策层融合的目的是选择合适的决策规则,结合激光雷达和单目视觉系统的检测结果,更可靠地判断无人机前方是否存在障碍物。
一般来说,融合是一个从低到高的多源信息集成过程。然而,在该文档的应用中,必须使用决策级融合结果反馈属性层信息的融合控制。
三、决策级融合—判断是否存在追踪物
单目视觉传感器和激光雷达传感器分别在各自的数据处理后跟踪目标。然后将相应的本地决策输入到决策层中融合和生产的全局考虑中。冗余数据处理可显着减少一个传感器检测到的误报和泄漏。
因为只有一个镜头的结果可能会造成误报警或误报警,本文采用时空融合方法:首先根据同时传感器空间局部决策融合;然后,融合结果下一拍的时域连续融合,3拍摄示踪最终确定的存在后融合。提高算法的可靠性。决策层融合是基于D-S证据理论的。时空融合策略如图1所示。
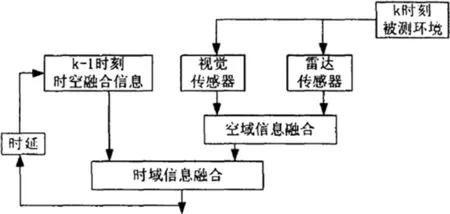
图1 决策级时空信息融合框图
四、特征级融合—判断追踪物距离
单目视觉传感器价格低廉,能提供大量的场景细节信息。本文采用两种传感器同时对同一目标进行距离数据的反射,并通过自适应加权计算计算距离的最终值。基本加权平均算法简单。在处理过程中,没有必要考虑传感器阵列测量矩阵和参数状态转移矩阵信息,但是在处理过程中会丢弃大量有用信息,这会影响算法的可靠性。因此,自适应加权用于确定融合权重,提高了算法的性能。
融合方法采用无反馈的图像融合和激光雷达数据的同步融合,即首先利用激光雷达数据和图像检测建立各自的目标航迹,然后融合激光雷达和图像检测。
五、建立虚拟实验环境
由于激光雷达设备不到位,现场试验暂时无法进行。但是单目视觉和其他传感器很难用数学模型来模拟。基于双传感器融合的实时跟踪任务,很难通过单传感器仿真实现算法测试和研究。理想的仿真系统可以模拟单目视觉与激光雷达传感器的融合,产生真实的动态实时传感器反馈。算法处于开发阶段,通过计算机仿真可以大大降低实验室开发的成本。
许多研究机构已经认识到虚拟实验环境在无人机技术研究和发展中的重要作用,并开始做相关研究。卡内基夏威夷大学梅隆大学机器人系高速公路仿真系统和智能实时监控系统。目前,国内虚拟现实技术在无人机邻域的研究中还没有得到广泛的发展。昆明理工大学开发了一个模拟真实路段和交通评价的模拟器,重型蒸汽技术中心也进行了类似的研究。
(一)单目视觉传感器的模拟
首先利用OpenGL的纹理贴图技术实现航道、白色短划线和风景:绘制一个通道到GL_QUADS广场并将通道结构,草,树木,建筑物和其他模式粘贴到一个正方形以获得真实的通道视图,在通道的两侧均匀地绘制一个,称为GlColorQ,是白色,可以产生白线。
然后3ds模型无人机看作为示踪剂,采用OpenGL作为无人机的观点(视觉传感器),根据无人机辆运动模型,对汽无人机实时计算当前位置,叫gluperspective()函数建立虚拟场景在OpenGL窗口可见,实现三维场景图挂在一个二维图像前打电话给gltranslate()函数;移动无人机的位置,glulookatq功能设置的单目视觉传感器的位置跟踪,以及无人机的相对位移将引起一个国王转化领域的OpenGL窗口,导致运动的影响。
最后,调用glReadPixels()函数来记录当前OpenGL视图窗口的实时显示,并且将单目视觉传感器检测图像发送到下一图像处理模块,以检测和跟踪信道和无人机。
(二)激光雷达传感器的模拟
激光雷达传感器模型模拟前视碰撞预警激光雷达的输出,计算激光雷达返回的场景中目标的距离、速度、方位角。
仿真时,分别建立本无人机和目标物体的运动模型。激光雷达的检测概率指定为Pd,激光雷达杂波个数服从均值为λ的泊松分布P(λ)。杂波在激光雷达传感器探测范围内均匀分布,设杂波密度为f(个/米2)探测区域而积为S(米2),则λ=f·s。
仿真时,设第k次量测的杂波个数为N(k),则由泊松分布P(幻可以确定当前的N(k),将这N(k)个杂波均匀分布在探测区域就可以实现杂波的模拟,激光雷达量测噪声通常为服从N(0,σ2)的高斯噪声。
则由卡尔曼滤波可以得到激光雷达关于目标物体各个时刻的状态估计。
六、仿真实验方案及结果
(一)实验方案
在第五章设计的无人机防偏防撞的单目视觉辅助实时追踪系统平台基础土,扩展了一个虚拟仿真模块。
在虚拟仿真模块中,对基于自适应加权平均的自适应融合算法进行了仿真,比较了单目视觉的远程测量结果,激光雷达的实际数据和融合方法,并评估了融合算法的性能。在实验中,无人机保持恒定速度,根据示踪剂的不同驱动条件设计了五个主要场景。对于每一个场景,计算单目视觉的均方根误差、激光雷达和融合方法以及实际距离值,以此作为判断某一时刻检测方法性能的依据。5个测试场景如下:
1.追踪物以定速度运动,速度与本无人机相同
2.追踪物以定速度运动,速度比本无人机速度大
3.追踪物以定速度运动,速度比本无人机速度小
4.追踪物做加速运动
5.追踪物做减速运动
(二)实验结果
以第二个测试场景为例,跟踪器以72km/h的恒定速度运行。本无人机以58公里/小时的时速紧跟其后,实验采样率为10帧/秒。
对测距公式中的摄像机参数进行定标。根据追踪物和本无人机的运动方程,可以精确计算当前的实际距离,选取30组实际距离和对应追踪物检测结果,用最小二乘算法离线计算出当前实验环境下的参数ay和v0。

表1 追踪物检测结果与实际距离对照
计算经过添加随机噪声和杂波模拟的激光雷达量测信号。
采用的激光雷达量测噪声均值和方差为muX=0,sigmaX=0.1,muY=0,sigmaY=2,激光雷达检测概率为Pd=0.9。
首先,模拟图像测量和激光雷达信号是卡尔曼滤波,在实验中,两个传感器的初始估计误差为0.4,模型的噪声方差为0.1。然后,使用所提出的用于融合两个滤波信息的自适应加权平均方法来获得新的范围值。下表为1次,4次,20次,50次仿真模拟结果的均方根误差。
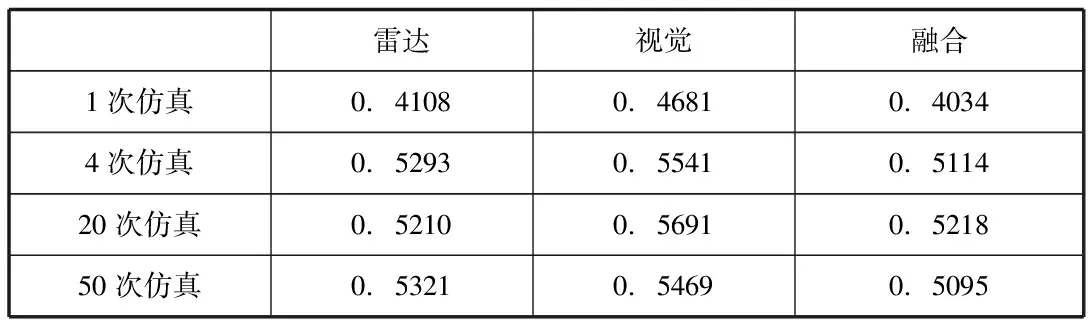
表2 100拍内的测距均方根误差
总结
本文的主要工作是进一步研究单目视觉/激光雷达融合实时跟踪算法和基于单目视觉实时跟踪关键技术的仿真。首先介绍了本文提出的决策级和特征级融合方法,并基于Opengl的二维图形系统开发技术,设计了虚拟实验环境,多传感器融合系统仿真平台和仿真实验中的融合方法。在本文中,所提出的融合跟踪方法的自定义加权平均值是虚拟实验发现该方法获得的距离测量结果比单传感器获得的距离测量结果更精确。
