基于神经网络自适应算法的机械手控制器的设计与仿真
2019-04-12马小瑞
李 斌 马小瑞
(1.甘肃省工业和信息化厅信息中心,甘肃 兰州 730000;2.甘肃省知识产权事务中心,甘肃 兰州 730000)
0 引言
随着机械、自动控制、计算机、人工智能和传感器等技术的飞速发展,机器人已进入人们的现实生活。目前,工业机器人已成为现代制造系统中不可或缺的一种自动化装备,被广泛地应用在汽车、飞机、电子产品等行业的制造中,机器人不仅被应用在军事、航天等尖端领域,而且正逐步走向社会、家庭领域,服务机器人已经进入人们的生活中。机器人技术已成为衡量一个国家综合技术水平的标志之一。该文以双臂机械手为例,首先确定机械手的动力学模型,根据已确定的被控对象进行控制方法的选择和控制器的设计。由于机器人是高度非线性的不确定模型,因此采用李亚普诺夫稳定性理论进行稳定性分析和控制器设计。建立Lyapunov函数V,根据已经提出的控制器结合被控对象模型证明V>0,V˙≤0,充分说明控制系统是全部或者局部渐进稳定的;最后,利用S-函数,在MATLAB的Simulink中设计控制系统主程序框图,并且调用S-函数进行系统仿真或者利用纯M文件编写控制器和被控对象的命令函数。针对不同的控制方法构建主程序,并结合输出图形进行稳定性分析和控制性能比较。确定一个相同的双臂机械手作为被控对象,利用不同的控制方法进行仿真比较,通过仿真结果比较得出各种控制方法的利弊。
1 机器人PID控制
1.1 S-函数与方程
S-函数模块是整个Simulink动态系统的核心。Simulink在每个仿真阶段都会对S-Function进行调用,不同的flag值调用不同的功能子函数,参数flag与S-函数回调函数的关系见表1。
1.2 机器人动力学模型及其结构特性
一个N关节机器人,其动态性能可由二阶非线性微分方程描述:

公式(1)中,q∈Rn*n为关节角位移量;M(q)∈Rn*n为机器人的惯性矩阵;∈Rn表示离心力和哥氏力;G(q)∈Rn是重力项;∈Rn表示摩擦力矩;τ∈Rn为控制力矩;τd∈Rn为外加扰动。
1.3 双臂机械手的运动方程
当忽略重力和外力干扰时,采用独立的PD控制,能满足机器人定点控制的要求。
设双臂机械手方程为:

2 机器人神经网络自适应控制
主要对RBF网络的基本原理、高斯基函数、网络参数对逼近效果的影响以及基于RBF网络逼近的Simulink连续系统仿真和M语言离散数字化仿真方法。
2.1 RBF网络
2.1.1 RBF网络结构
在RBF网络结构中,X=[x1,x2,…xn]T为网络的输入向量。设RBF网络的径向基向量H=[h1,h2,…hm]T,其中hj为高斯基函数:

表1 参数flag与S-函数回调函数的关系
其中,网络第 j个节点的中心矢量为cj=[cj1,…,cjn]。
设网络的基宽向量为:

其中,bj为节点j的基宽度参数,且为大于零的数。网络的权向量为:

RBF网络的输出为:

因此,任意连续函数都能利用RBF网络来逼近。
2.1.2 RBF网络逼近模型不确定部分
RBF网络算法为:

其中,x 为网络的输入信号;φ=[φ1,φ2,…,φn]为高斯基函数的输出;θ为神经网络权值。
假设:

其中,θ*为n×n阶矩阵,表示对f(x)最佳辨识的神经网络权值。
2.2 基于模型不确定补偿的RBF网络机器人自适应控制
2.2.1 基于不确定补偿的机器人建模
在实际中,对公式(2)所示对象很难建立具体模型,只能建立理想的名义模型。分别用D0(q),,G0(q)来表示机器人的名义模型。
根据模型精确建模时设计的控制律,针对名义模型,控制律设计为:

将控制律公式(3)带入公式(2)中,得:

取ΔD=D-D,ΔC=C-C,ΔG=G-G则:

由公式(5)可知,由于模型建模不精确会导致控制性能的下降。因此,需要对模型不精确的部分进行辨识。

则得到在控制律公式(5)下的误差方程为:

其中
假设模型不确定项f已知,则修正的控制律为:

将控制律公式(7)带入公式(2)中,得到稳定的闭环系统:

2.2.2 控制器的设计
控制器设计为:

其中,

取Lyapunov函数为:

可以采用2种自适应律设计方法。
2.2.2.1 自适应律之一
取自适应律为:

则
2.2.2.2 自适应律之二
取自适应律为:

则

这种方法可以保证权值的有界性。
2.2.3 仿真实例
以双力臂机械手控制为例进行控制器的仿真和结果比较。
对于双关节机器人系统(忽略摩擦力),其动力学模型为:

其中,
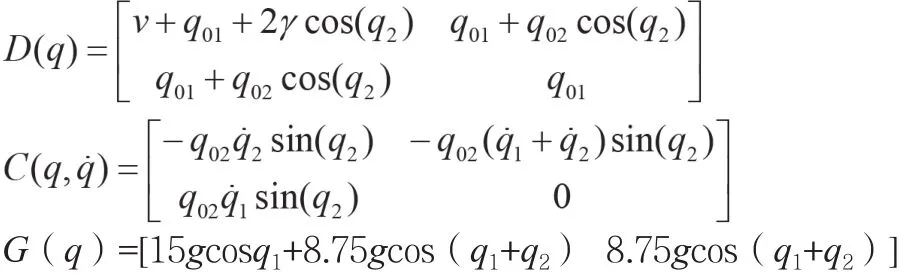
其中,v=13.33;q01=8.98;q02=8.75;g=9.8。
扰动误差、位置指令和系统的初始状态分别为:
位置指令为:

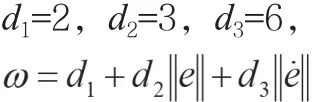
控制参数取:

运行Simulink仿真主程序图如图1所示。
仿真结果如图2所示。
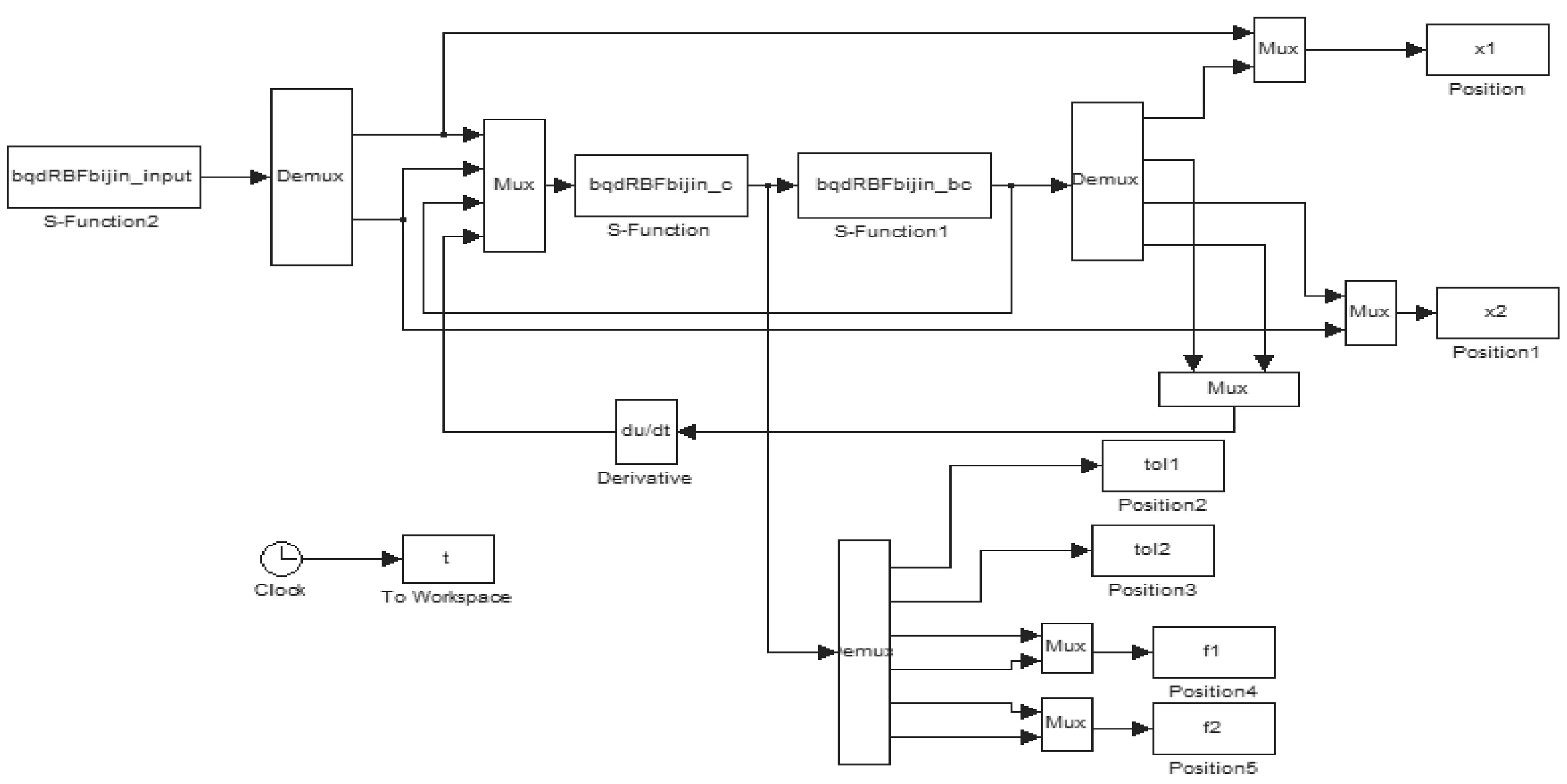
图1 基于模型不确定补偿的RBF网络机器人自适应控制主程序图
由仿真结果可知,采用此控制律可以保证权值的有界性,解决神经网络权值的UUB(Unknown Upper Bound)问题,同时对机器人的不确定部分进行了补偿。通过改变一些控制参数的特征值大小,象Q的特征值越大,P的特征值越小,并且减小神经网络建模误差η的上界,就可以使x的收敛半径变小,从而达到改善跟踪效果的目的。
2.3 基于模型分块逼近的机器人RBF网络自适应控制
2.3.1 基于分块逼近的机器人建模

其中,ED、EC和EG分别为神经网络对D(q)、和G(q)的建模误差。
2.3.2 控制律的设计
定义
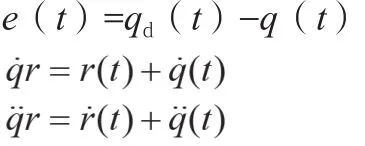
其中,qd(t)为理想的位置指令;q(t)为实际的位置。
定义
则
其中,Λ>0。
设对神经网络建模项DSNN(q)、CDNN、GSNN(q)的估计值为:
控制律设计为:
其中,Kp>0 ;Ki>0。
自适应律设计为:

2.3.3 稳定性分析
取Lyapunov函数为:


图2 基于模型不确定补偿的RBF网络机器人自适应控制
其中,ΓDk,ΓCk,ΓGk为对称正定矩阵;,
则


经分析得到:

2.3.4 仿真实例
以双力臂机械手控制为例进行仿真和比较。选二关节机器人系统(不考虑摩擦力和干扰),其动力学模型为:

其中,



取控制器参数为
仿真结果如图4所示。
由仿真结果可知:各关节的位置均能跟踪系统所给的理想轨迹。控制律能够在一定的范围内有规律的变化。可以实现对实际模型中未知部分D(q)、和G(q)的高效逼近。因此,基于模型分块逼近的RBF神经网络自适应控制性能较好。
3 基于RBF网络的双机械力臂自适应数字控制
选择双力臂机械手作为被控对象。在不考虑摩擦力和外界干扰的情况下,其动力学模型为:

仿真中采用了MATLAB函数“ode45”积分求解。采样时间取ts=0.001,将控制律公式(13)和自适应律公式(14)(15)(16)离散化,取,。取控制律参数为

位置指令为qd1=qd2=0.5si(n2πk·ts)。自适应中,神经网络权值调节矩阵ΓDk,ΓCk和ΓGk中的元素值分别取5、10、10。RBF网络的隐含层节点数取5,用于逼近的,,的高斯基参数见控制器子程序。仿真结果分别如图5和图6所示。
由仿真结果可知:该例中RBF网络隐含层节点采用了node=5,从t=1.25之后各关节的位置基本可以跟踪理想轨迹;改变隐含层节点个数,当node=2时,关节1和关节2均不能完全跟踪理想轨迹;当node=3时,从t=1.5之后各关节的位置可以完全跟踪理想轨迹;当node=10时,从t=0.75之后各关节的位置可以完全跟踪理想轨迹。因此,基于RBF网络的双机械力臂自适应数字控制可以通过增加神经网络隐含层节点的个数,达到更迅速更逼近的控制效果。同样,隐含层节点的个数太多会增加网络运算的复杂性。
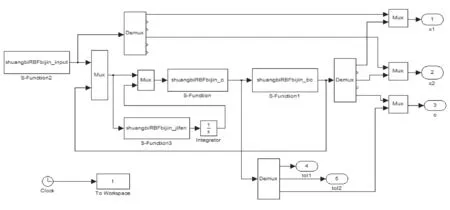
图3 基于模型分块逼近的机器人RBF网络自适应控制
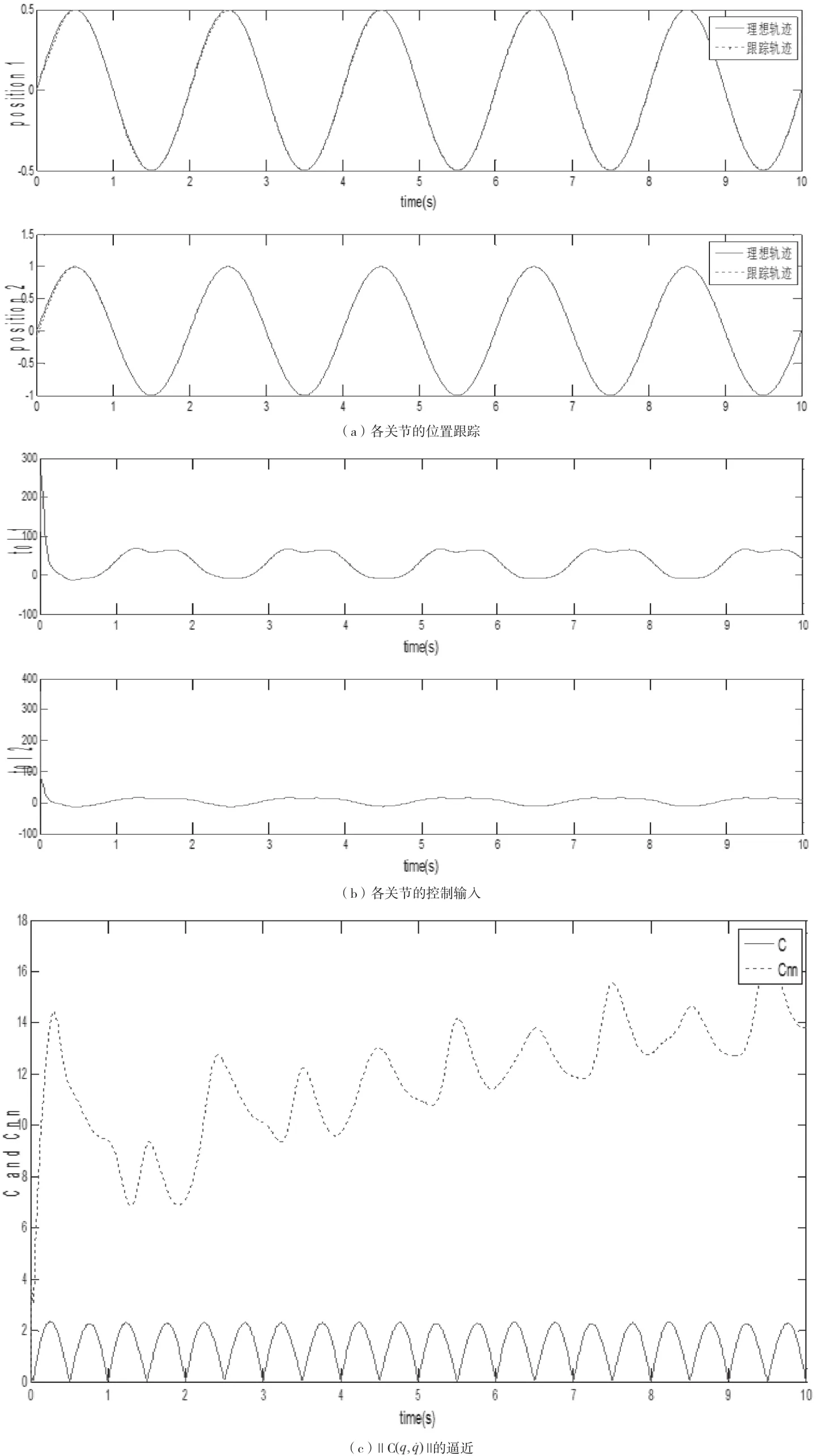
图4 基于模型分块逼近的机器人RBF网络自适应控制
4 结论
该文在分析机器人双臂机械手控制的基础上,提出了机器人双臂机械手的神经网络控制算法。在被控对象为非线性模型的情况下,利用RBF网络自适应方法设计控制器。通过编写控制器和被控对象的S-函数或M文件,运用仿真知识并对运行结果进行比较和稳定性分析。
通过Lyapunov稳定性理论得到的控制器可使系统要么达到局部渐进稳定,要么达到全局渐进稳定。采用RBF神经网络控制可以实现对机器人动力学方程中未知部分的在线精确逼近,从而可通过在线建模和前馈补偿的方式,实现机器人的高精度跟踪,其结果与被控对象已知时基本一致,控制性能良好。双臂机械手是在单臂机械手的基础上又增加了一维标量,它的控制方法与单臂类似。以此类推,以后多关节机械手的控制器设计,也可以认为是多个单臂的综合,只是设计问题会随着关节数的增多而变得更复杂、更困难。该文提出的RBF神经网络算法对机器人双臂控制的仿真结果可以看出,该算法可以提升各关节的控制性能,使其更好地完成控制需求。
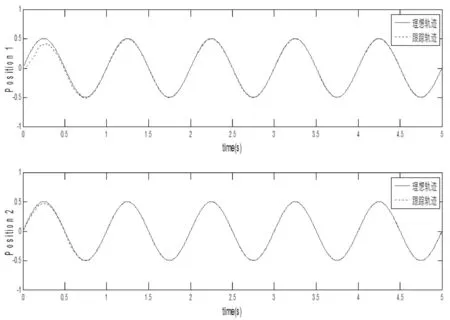
图5 各关节的位置跟踪
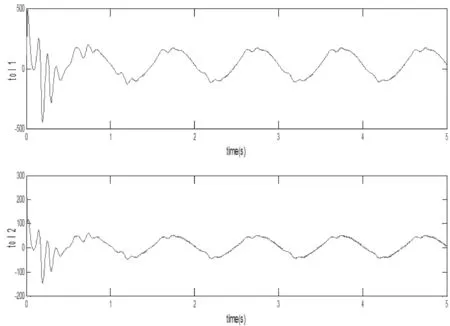
图6 各关节的控制输入