Dim Moving Small Target Detection by Local and Global Variance Filtering on Temporal Profiles in Infrared Sequences
2019-02-13ChenHaoLiuDelian
Chen Hao,Liu Delian
(1.School of Electronic Engineering, Xidian University, Xi’an 710071, China;2.School of Physics and Optoelectronic Engineering, Xidian University, Xi’an 710071, China)
Abstract: In this paper, the temporal different characteristics between the target and background pixels are used to detect dim moving targets in the slow-evolving complex background.A local and global variance filter on temporal profiles is presented that addresses the temporal characteristics of the target and background pixels to eliminate the large variation of background temporal profiles.Firstly, the temporal behaviors of different types of image pixels of practical infrared scenes are analyzed.Then, the new local and global variance filter is proposed.The baseline of the fluctuation level of background temporal profiles is obtained by using the local and global variance filter.The height of the target pulse signal is extracted by subtracting the baseline from the original temporal profiles.Finally, a new target detection criterion is designed.The proposed method is applied to detect dim and small targets in practical infrared sequence images.The experimental results show that the proposed algorithm has good detection performance for dim moving small targets in the complex background.
Key words: small target detection; infrared image sequences; complex background; temporal profile; variance filtering
0 Introduction
The detection of infrared dim targets in the complex background is of great importance for infrared monitoring and warning system, and it is an essential way to improve the system’s detection range and detection probability[1-3].If a target is far away from the detecting systems, the image formed on the imaging plane may only occupy one or a few pixels, and the distribution information and structural information of the target are disappeared[2-6].Under this situation, the detection of these targets is difficult.Nowadays, to detect enemy targets as far as possible is still a challenging task.Therefore, the detection of dim moving small targets in complex background is a classical and hotspot issue for researchers around the world.
In the past two decades, researchers have done a lot of studies and proposed many small moving target detection algorithms.These algorithms are mainly divided into two categories, one is the detection-beforetrack(DBT)algorithms.The DBT algorithms detect the targets in one single frame and then track the targets according to their temporal information[7-8].Therefore, these algorithms require that the targets can be detected at least in one single frame, such as correlation algorithm[9], wavelet algorithm[10]and morphological algorithm[11].The other is the track-before-detect(TBD)algorithms, in which the targets are smaller than those detected by the DBT algorithms in the infrared images.The targets usually occupy only a few pixels or even one single pixel and can hardly be detected in one single frame.These algorithms mainly perform tracking the intensity variation characteristics of all pixel points[12]and then detect targets according to the temporal differences of the target and background pixels, such as continuous wavelet method[13], temporal contrast method[14], vector cross multiplication[15]and so on.Obviously, when the target is far away from the imaging system, the situation encountered is mostly the latter case[16].Practically, the detection of the dim small target based on temporal characteristics can be easily achieved as the background is relatively simple[17-18], and noise is not very severe[19].However, when the background is complex and has slowly evolving cloud, a large number of background pixels will have the same temporal characteristics as that of the targets, making false alarms increase significantly.Based on the analysis of the temporal profile characteristics of the target and complex background, a dim moving small target detection method based on temporal filtering is proposed.By designing a local and globe variance to estimate the fluctuation level of a temporal profile, the target impact is comprehensively considered.Then a new filter is designed to effectively extract the height of the target pulse.Finally, a new target detection metric is obtained.The experimental results show that the proposed algorithm has good detection performance.
1 Temporal characteristics of infrared scenes
When a scene is captured by a starring imaging system, the pixels of the imaging system will produce temporal profiles over a short period of time.The temporal profiles indicate the variation of the pixel values in the period of time.As a moving target passes through a detector unit, a pulse signal will generate on the temporal profile of the detector unit, and the intensity of the pulse signal is related to the difference of brightness between the target and the surrounding background, and the width of the pulse signal is related to the speed of the target.Although the temporal profile of the target has a significant pulse signal relative to the background temporal profile, the evolving cloud changes greatly, which will produce large fluctuations at the cloud edge temporal profiles.The evolving cloud temporal profiles have strong interferences for target detection.Fig.1 is four typical types of temporal profiles of an infrared scene.
Fig.1 Temporal profiles of an infrared scene
As shown in Fig.1(a), P1 is a temporal profile of a target, P2 is a temporal profile of the cloud edge, P3 is a temporal profile of the clear sky background, and P4 is a temporal profile of the inner cloud.It can be seen that the temporal profile of clear sky background and the temporal profile of the inner cloud basically fluctuate up and down along a certain constant[P3 and P4 in Fig.1(b)].While the temporal profile of cloud edge changes slowly and irregularly[P2 in Fig.1(b)].For the target temporal profile, there is a sharp pulse signal produced by the moving target[P1 in Fig.1(b)].Therefore, a dim moving target can be detected by detecting the temporal profiles that contain a pulse signal.
As shown in Fig.1, different types of temporal profiles have different fluctuation characteristics.The temporal profile of clear sky background and inner cloud can be denoted by
xc(n)=C+wc(n)
(1)
WhereCis a constant,ndenotes the time index of the infrared image sequence, and
(2)
xe(n)=xe(n-1)+we(n)
(3)
where
(4)
xt(n)=u(n)+t(n,p)+wt(n)
(5)
u(n)is determined by the location of the target.If the target is at a clean sky or inner cloud position,u(n)=C.If the target is at the edge of the cloud,u(n)=xe(n-1).t(n,p)is the target pulse,pis the vector determined by the target itself.Therefore, any pixel in the scene can be described by the above three models.
To validate the distribution of temporal noise, we select a region of clear sky to do statistical analysis.Temporal noise is obtained by removing mean value from each temporal profile.
Fig.2(a)is an infrared scene with evolving clutter.Fig.2(b)is the distribution of temporal noise.The black solid line is the fitting of the temporal noise distribution with a Gaussian model.The result shows temporal noise distribution in infrared image sequences can be modelled by a Gaussian distribution.
Fig.2 Temporal noise in an infrared image sequence
2 Local and global variance filter
In a whole infrared scene, the temporal profiles of cloud edge change irregularly, which is similar to that of the target temporal profiles.It is difficult to find a suitable function to fit cloud edge temporal profiles, which is also the main difficulty to detect the target temporal profiles.If we can find a suitable baseline of each temporal profile, the irregular shape of cloud temporal profiles can be eliminated.
In order to obtain the baseline of the temporal profiles, in this paper, we propose a new local and global filter to obtain the baseline of the temporal profile.Since the target temporal profile has a significant pulse signal, the new filter should have the ability to eliminate the impact of the pulse signal and also can estimate the level as close as possible to the fluctuation of cloud edge.To this end, the newly designed filter uses the excellent statistics parameters of the local and global variance to obtain the baseline of each temporal profile.The response of the new filter is calculated by using three sliding windows along the temporal profiles, a left sliding window, a middle sliding window and a right sliding window, shown in Fig.3.
Fig.3 Sliding window of the new proposed filter
Suppose the size of the left sliding window, the middle sliding window and the right sliding window arewl,wcandwrrespectively.xmlandxmrdenote the minimum value of the left sliding window and the right sliding window respectively.The two minimum values are introduced to estimate the baseline of the temporal profile.The width of the middle sliding window is designed to extract the pulse signal.
The local variance at a time of a temporal profile can be calculated by sliding a window along the time axis:
(6)
(7)
The global variance of a temporal profile is
(8)
Wherewgis the size of the window that is used for global variance estimation.The global variance denotes the fluctuation level of the whole temporal profile.Whereas, the local variance denotes the sharp change of the temporal profile.If a pulse signal presents on a temporal profile at a time domain, the local variance of that time will become large.To consider both the local and global variance of a temporal profile, a new coefficient is designed as
(9)
To cut off the large local variance, another new parameter is designed as
(10)
Whereαtis a threshold that used to suppress large local variance.Therefore, the background fluctuation level can be estimated by
xer=β(n)xev(n)+[1-β(n)]x(n)
(11)
(12)
xml(n)andxmr(n)are the minimum value of the left sliding window and the right sliding window located on the two sides of a potential pulse signal.
(13)
(14)
Wherewlandwrare the width of the left sliding window and the right sliding window respectively,nlandnris the start and the end time index of the left sliding window and the right sliding window respectively.
To indicate the performance of the new proposed filter, the baseline of two temporal profiles of a target and the edge cloud is calculated.Fig.4(a)shows the baseline filtering result of the cloud edge temporal profile.Fig.4(c)shows the baseline filtering result of the target temporal profile, where the solid line is the temporal profile and the dashed line is the filtering result.It can be seen that the new local and global filter can well fit the background fluctuation and can eliminate the influence of the target pulse signal.
By using the temporal profile filtering method to obtain the baseline, the target pulse signal on the temporal profile can be obtained:
xp(n)=x(n)-xer(n)
(15)
Then the intensity of the target pulse signal is
(16)
Wherenis the time index of a temporal profile.The max(·)function calculates the maximum value of thexp(n).If a target exists in the temporal profile, the maximum value will correspond to the pulse signal.The target pulse signal extraction result is shown in Fig.4.
As shown in Fig.4, the large deviation of the cloud edge temporal profile has been removed, while the pulse-like signal of the target is well preserved.It can be seen that the new filter can greatly eliminate the irregular fluctuation of background temporal profiles and persist the pulse signal well, which will improve the target detection performance.
Fig.4 Target pulse signal extraction results
To detect target pixel, only considering the height of the pulse signal is not very appropriate.The fluctuation level should also be considered.To estimate the fluctuation level, the temporal profiles are segmented to three pieces.The minimum variance of the three pieces is used as the variance of a temporal profile[20].Therefore, the detection criterion is
(17)
3 Spatial information correlation
For a moving target in the scene, the targets have their own motion characteristics.A target may appear on several pixels adjacent to each other in the space, and may not appear in a single pixel in a scene[21-22].Therefore, the motion characteristics of the target itself can be used to further improve the detection perfor-mance of the proposed algorithm.Fig.5 shows the temporal profiles of a target pixel and its eight neighbor pixels.
In Fig.5, three pixels in the middle row contain the target pulse signal, and three pulse signals have obvious sequential characteristics in the time domain, so the sequential characteristic can be used to further eliminate the interference of the background signal.
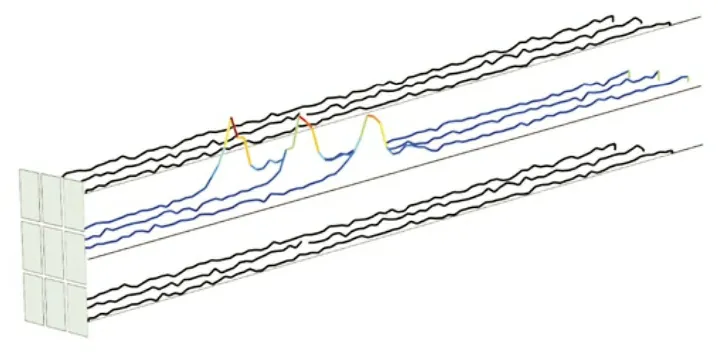
Fig.5 Target temporal profiles of eight adjacent pixels
For the temporal profiles of targets, they have large local variance.Thus, the local and global variance can be used to extract potential targets.The maximum ratio between local variance and global variance is
(18)
(19)
lp=1 denotes that the pixel is a potential target pixel.Then considering the spatial correlation of the temporal profile:
(20)
(21)
qcandqnebare the time index of potential targets of the central pixel and its neighbor pixels.Therefore, the time interval of adjacent pixels is
lit=qneb-qc
(22)
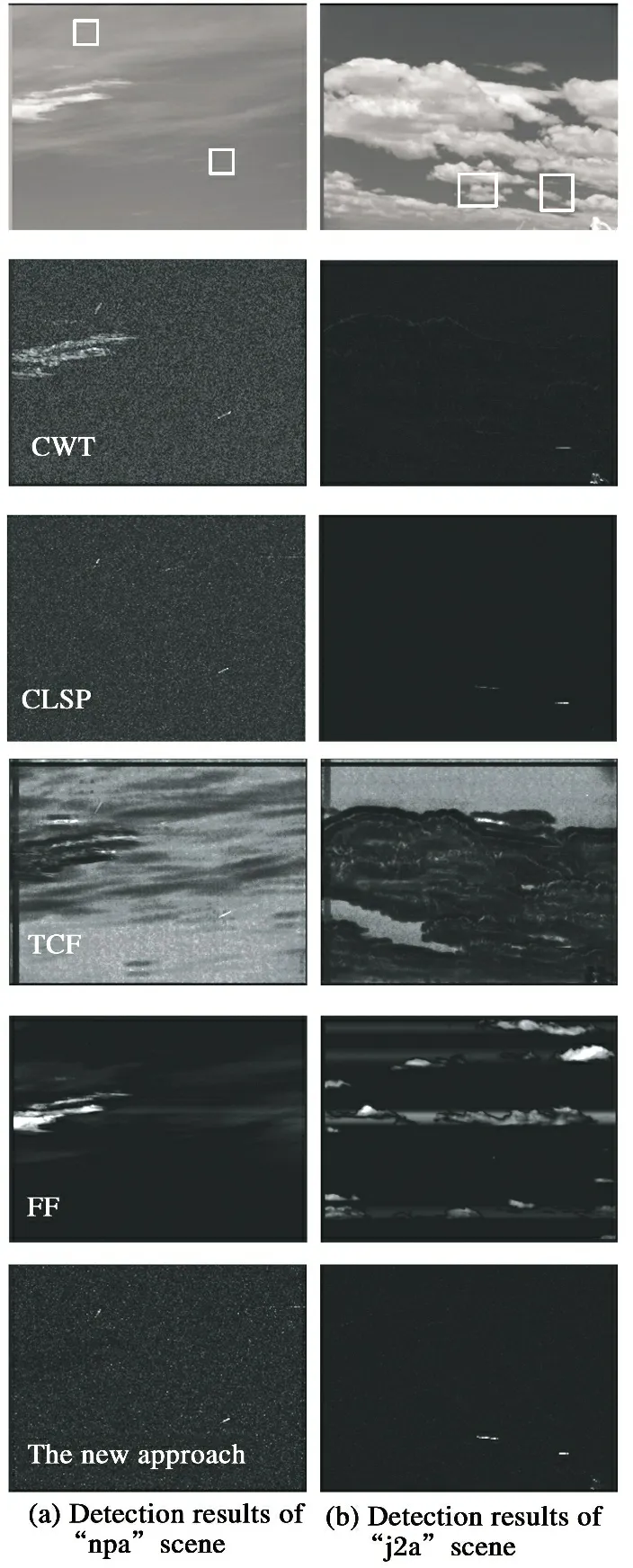
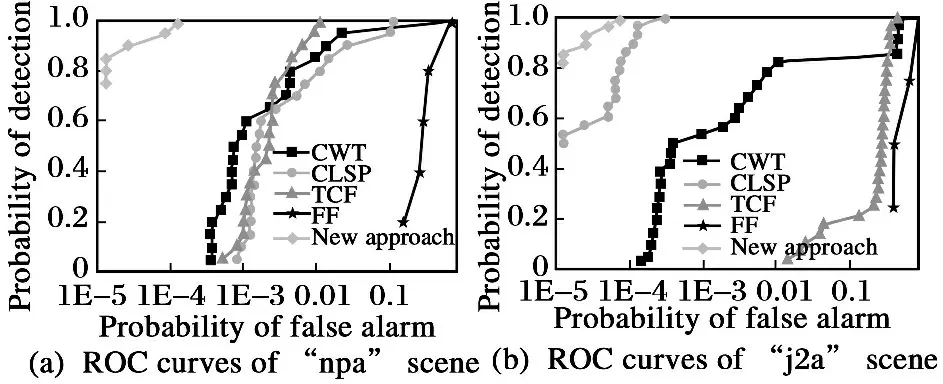
Iflit To evaluate the performance of the proposed approach, we apply the new approach to two infrared image sequences that are captured by Rome Laboratory[22], named as “npa”, and “j2a”.Both the “npa” and “j2a” scenes contain two targets located in the heavy clutters.All the targets are emphasized by red boxes.To compare the performance of our proposed approach, the CWT[23], CLSP[24], TCF[25]and FF[26]approaches are selected as reference approaches.The detection results are shown in Fig.6. Fig.6 Detection results As shown in Fig.6, the CWT approach can highly enhance the response of target, but the heavy clutters and noisy background also have high responses.The CLSP approach has good performance in background suppression, yet some target pixels are also suppressed.The interferences of TCF approach are much higher in the three evaluated scenes.The FF approach has a high response on heavy clutters, whereas the target pixels are missed.However, evolving clutters have high responses, which can lead to high false alarms.The results of the new proposed approach have a high contrast of target and background in the evaluated scenes.All the targets are enhanced and the response of background becomes much weaker. To further evaluate the performance of the proposed approach, we calculate the receiver operating characteristic(ROC)curves of the evaluated approaches.The results are shown in Fig.7. Fig.7 ROC curves As shown in Fig.7, the ROC curves of the new proposed approach are at the top of the evaluated approaches.The results indicate that the new proposed approach has much better performance than the evaluated approaches. The proposed approach differentiates the target, background, and noise in the temporal domain perspective and performs target detection using temporal profiles.The key focus of the approach is the elimination of the moving cloud background temporal profiles.The local variance and the global variance are used to obtain the baseline of the temporal profile.The noise model uses a white Gaussian noise model, which is a model obtained by statistical data fitting in Ref.[16, 27]and has good performance in high-performance infrared imaging systems.In practical applications, the noise of the infrared imaging system may not subject to the Gaussian distribution.The detection performance of the proposed approach will decrease.Due to the improvement of the performance of infrared imaging equipment in recent years, the influence of noise is not the main interference factor relative to the background.Therefore, the proposed approach focuses on the cloud background removing and has good application prospect. In this paper, a dim target detection algorithm based on temporal profile filtering is proposed, which makes the use of the temporal characteristics of the target and background.It can detect almost single-pixel dim targets in low-contrast, slowly moving backgrounds.A temporal profile filtering method is designed to obtain the detection baseline and the intensity of the pulse signal produced by targets.The spatial information of a moving target is also introduced to further eliminate the interferences of evolving background.The new proposed algorithm is applied to the detection of actual infrared image sequences and has achieved good results.In addition, the new proposed algorithm has the characteristics of a parallel operation, which is more conducive to the hardware implementation of the signal processor and has a strong practical value.4 Results and discussion
5 Conclusions
