聚焦、检测、跟踪、再聚焦:基于经典跟踪前检测框架的实时小目标检测技术
2019-02-13刘本源宋志勇范红旗
刘本源,宋志勇,范红旗*
(1.空军军医大学 军事生物医学工程学系,西安 710032;2.国防科技大学 电子科学学院,长沙 410073)
0 引 言
隐身技术和隐身兵器的发展和技术迭代,对雷达系统的检测和估计性能提出了挑战[1-2]。隐身目标多为弱小、非合作目标,典型的截获过程需要将目标在不同时刻、不同位置的能量累积起来。飞行器的运动属于一种物理参数限制的马尔可夫过程,因此可利用目标的雷达回波在不同时刻间的相关性,通过长时间积累使目标能量聚焦,进而逐步突破检测门限生成目标的检测报告。
目前,现有的小目标检测跟踪架构多为一种聚焦[3]、跟踪的级联模式。首先,通过聚焦算法累积目标能量,随后利用“恒虚警”(CFAR)检测生成过门限的目标报告,最后通过滤波确认目标航迹。此类传统方法的核心是聚焦,聚焦方法的好坏直接决定了小目标的检测跟踪性能。
Xu等人[4]提出了Radon Fourier Transform(RFT)方法,其核心思路是
Li等人[5]提出的Radon Lv变换算法,思路与RFT类似。此类方法需要对速度进行网格搜索,计算量大,并且速度的离散化精度(步长)有限,影响信号聚焦效果。同时,该方法未考虑二次项(加速度)对聚焦性能的影响。在此基础上,Chen等人[6]提出了RFT结合数阶FFT(FrFT)变换的RFRFT方法。当加速度为0,RFRFT等同于RFT;当不存在距离走动(Range Cell Migration,RCM)时,等同于利用FrFT估计加速度,但是RFRFT需要同时对速度v、加速度a进行网格搜索,计算量大且实时性差。
Keystone变换(Keystone Transform,KT)是一种无需网格搜索的速度补偿方法,通过建立雷达回波模型,在变换域利用坐标伸缩变换对回波模型中的一次项、二次项进行解耦。经典的KT可利用插值实现。Zhu等人[7]提出了一种基于Chirp Z Transform(CZT)无需插值的KT实现方法。Zheng等人[8]提出了针对一次、二次误差的三维变换补偿算法,可以看作一种通用的KT(General KT,GKT)算法。Tian等人[9]针对加速度补偿需求,结合KT和RFT,提出了KT-RFT算法。Jin等人根据信号特征,提出了计算二阶相位差[10]的信号积累算法。Zhang等人[11]提出利用二阶KT(Second-order KT,SKT)对三次相位进行补偿,实现弱小机动目标的聚焦和估计。以上方法的主要思路是利用SKT对距离加速度解耦,随后估计相位的chirp rate(CR)及其导数,得到加速度和加加速度,最后进行相位补偿,提升运动目标能量积累增益。
值得注意的是,最近提出的检测前跟踪(Track Before Detect,TBD)思路,可以认为是聚焦、检测、跟踪这三种模块的有机组合。由于此类方法避免了CFAR检测对目标信噪比利用率的损失,具备优于DBT的性能。但是TBD多采用粒子滤波[12]或随机有限集滤波器实现,计算量[12-13]及实现难度远大于传统的多目标多Kalman滤波器。
为此,本文针对实时弱小目标检测和跟踪的需求,提出一种聚焦、检测、跟踪、再聚焦(Focus、Detect、Track、Re-Focus,FDTR)弱小目标检测跟踪方法。该方法是一种基于传统检测后跟踪架构(DBT)的工程实现,所有模块均采用基本的检测跟踪方法实现,通过精心设计的聚焦和恒加加速度(Constant Jerk Model,CJM)模型,利用多目标多卡尔曼滤波器(Multiple Targets Multiple Kalman Filter,MTMKF),实现弱小目标的检测、跟踪、航迹维护等功能。
本项目的源代码全部公开,结果可复现,便于读者下载评估。源代码下载地址为
https://github.com/liubenyuan/fdtr
1 数学模型
1.1 变量及定义
在距离多普勒RD平面内,快时间(fast time)维度为319,慢时间(slow time)以32个脉冲构成一帧(frame)数据。雷达脉冲重复频率为32 kHz,帧周期为1 ms。为了检测弱小目标,需要多帧相参积累。本文中相参积累时间(CPI)为25帧。在一个CPI内,完成目标的聚焦和检测;多个CPI之间,利用多目标多卡尔曼滤波器进行滤波估计。
CPI内的原始数据定义为X,有X∈C319×32N,其中N为相参积累帧数。定义Xi为X的第i帧数据,有Xi∈C319×32。
令R为CPI内的RD图像序列。RD图像序列的获得方法为,依次对Xi,i∈{1, …,N}的慢时间进行FFT变换,得到第i帧RD图像Ri∈C319×NFFT,其中NFFT为FFT点数;而R∈C319×NFFT×N即为多帧RD图像序列,或称多观测分量(Multiple Measurement Vector,MMV)RD模型。R为一个三维数据结构,通过对帧间信号聚焦,实现弱小目标能量的积累。令F为一个CPI聚焦后的图像,F取Focus意,有F∈R319×NFFT。
1.2 雷达回波的数学模型
雷达回波模型可写为[7]
(1)
其中,τ是距离维时间(快时间,fast time),t是慢时间(slow time)。式(1)中第1项是距离回波的冲激响应,其傅里叶变换为
(2)
而
M(fτ)=FFT(u(τ))
对τ进行FFT,可得
(3)
将r(t)在t=0处展开,可得

(4)


(5)
距离的非线性项(速度、加速度)影响相位和包络,降低长相参周期下信号的积累效果。回波信号模型可写作:
s(fτ,t)=M(fτ)·
(6)
本文将在该信号模型下讨论聚焦算法。
2 FDTR小目标检测跟踪方法
2.1 总体架构
FDTR的总体架构如图1所示。
针对距离多普勒(RD)平面内的弱小目标检测问题,通过多帧信号的累积实现弱小目标的聚焦和参数提取,利用卡尔曼滤波实现目标状态的精确估计。
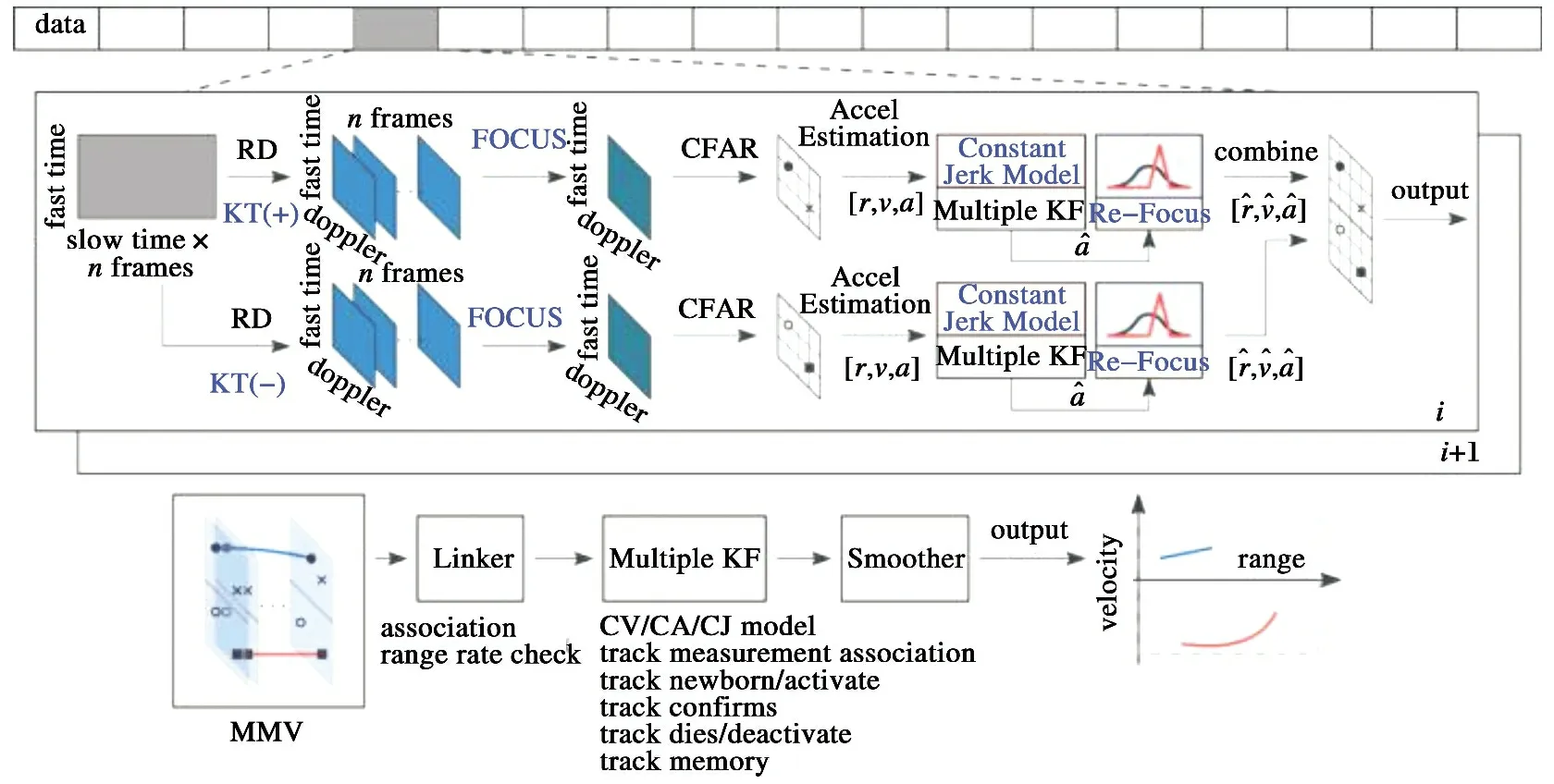
图1 FDTR算法整体流程图
Fig.1 The flowchart of FDTR
2.2 Focus:信号聚焦
2.2.1 Keystone变换
该模块主要完成RD信号Ri的聚焦,利用一阶Keystone变换消除距离速度耦合,提升信号积累的能量。令
(7)
则雷达回波的相位为

(8)
通过KT变换,消除了速度v和距离fτ之间的耦合。KT变换无需目标速度先验信息或进行速度搜索。KT变换可以采用插值法[14]或Chirp-Z Transform(CZT)实现[15]。CZT实现[7, 15]基于傅里叶变换,具备优异的计算效率。
2.2.2 RD平面距离差分目标增强方法
FDTR采用了一种在距离维计算差分的增强方法。借鉴图像处理中“微弱线条增强(dim line enhancement)”的思路,对KT变换后的RD图像序列R,在距离维上计算2阶差分:
Renhance=R(r)″
(9)
具体实现中可利用有限差分法逼近,即在距离维计算与核函数[1, -2, 1]T的卷积。该方法既可以利用能量变化的特征,还可以保留相位以便进行二次补偿和纠正;具备相参积累和非相参积累的优势,计算效率高。
2.3 Detect:检测
采用二维CFAR检测,隔离单元gap为1,参考单元ref为2,门限阈值比scale为3.03。
对于弱小目标的检测,级联CFAR降低了信噪比利用率。本文采用传统的级联CFAR方案,目的是探究经典方法在弱小目标检测和估计中的极限性能。后续研究可以通过交换模块顺序,或者修改门限阈值比,利用检测前跟踪的思路,提升信噪比的利用率。
目标在距离多普勒维度上具备一定的宽度,较强的目标会跨越几个单元。因此,在具体实现中,并联两个CFAR,分别针对差分前和差分后的数据进行检测,随后利用RD聚类方法(代码:RDScan)生成过门限的目标报告。
2.4 Track:跟踪
采用恒加加速度(Jerk)模型,对速度和加速度的估计进行平滑滤波xn+1=Fxn,其中:
(10)
(11)
随后,利用多目标多卡尔曼(Multiple Targets Multiple Kalman Filter,MTMKF)滤波器,实现多目标的跟踪。在该滤波器中,实现了目标生成、消亡、记忆、合并等操作规则。
2.5 Re-Focus:再聚焦
针对一个相参周期CPI内的数据R,FDTR不但估计距离、速度,同时利用过门限目标所在单元的序列像,估计加速度。其主要思路是二分法:
r=R[rcell, vcell]∈CN
r1,r2=split(r)
v1,v2=velocity(r1,r2)
a=2(v2-v1)/T
(12)
式中,r为目标所在距离多普勒单元的多帧序列像(复数),split函数将r分为前后两部分,随后分别估计这两部分的速度,利用差分计算加速度。

3 实验结果及讨论
3.1 聚焦及检测
首先,通过对Xi的慢时间做FFT得到单帧RD图像Ri,见图2。图中存在两个目标,弱小目标由于信噪比低,在单帧图像中很难检测。
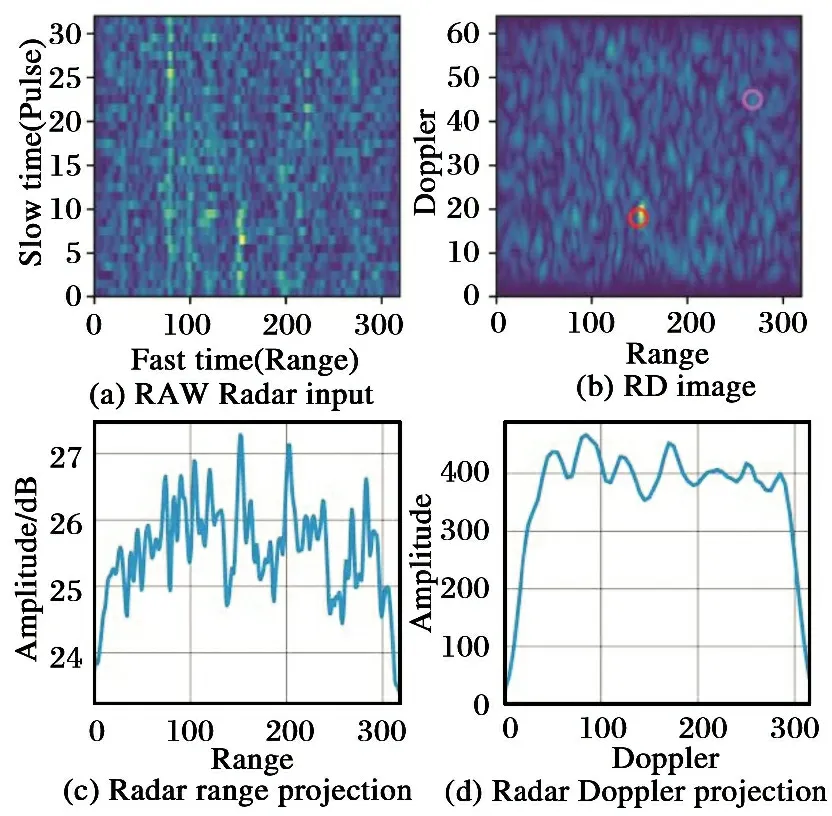
图2 单帧RD图像
Fig.2 Single frame RD image
一种有效的策略是利用多帧相参或非相参积累,将弱小目标的能量累积起来,使其突破阈值。选定图2中弱目标所在的多普勒单元(Doppler Cell),绘制距离序列像(Range-Frame),见图3。
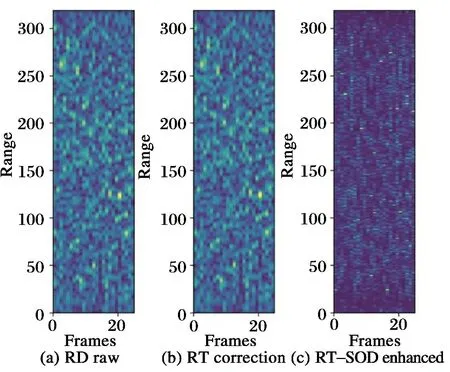
图3 弱小目标的距离序列像
Fig.3 Range-frame profile of the dim target
从图3可见,待检测弱目标在序列像中是一条微弱的线(Dim Line)。借鉴图像处理中的“微弱线条增强”方法,即通过高通滤波增强图像的边缘。FDTR采用了一种差分聚焦方法:对距离维计算2阶差分。从处理后的图像中可看出弱目标的序列轨迹(位于距离序列像上半区),见图3(c)。
图4为1个CPI相参积累的结果。采用Radon傅里叶变换(RFT)和Radon差分(RT-SOD)都可改善目标的累积信噪比,但提升效果有限。而本文提出的聚焦方法积累效果较好。

图4 强目标及弱小目标聚焦后的RD图像
Fig.4 Focused RD image of the strong and the dim targets
图5为弱目标速度所在单元的距离像(range profile)。本文提出的聚焦算法可以在1个CPI中使目标能量高于噪声基底约4.5 dB。
利用CFAR检测并提取FOCUS后图像中的目标。CFAR参数为:隔离单元为1,参考单元(R轴、D轴)分别为2,门限比3.03。图6中,利用聚焦后的图像可有效检测强目标和弱目标。
采用Keystone变换(KT)或Radon变换(RT)聚焦都可抑制距离走动。在较短的CPI内,若目标加速度不致于导致多普勒单元走动,则两者积累效果类似,见图7。
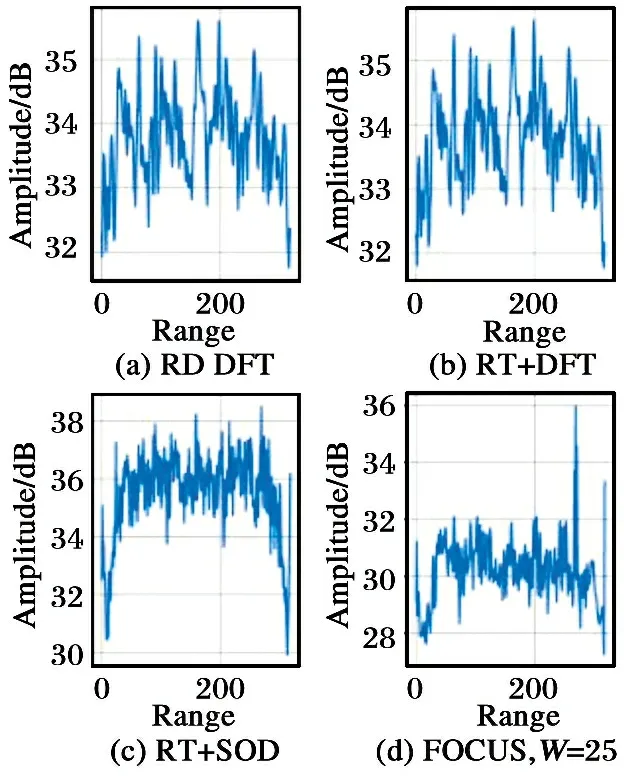
图5 弱目标聚焦后的距离像
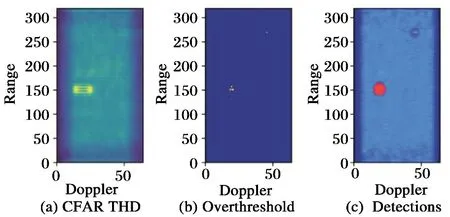
图6 聚焦后RD图像的CFAR检测结果
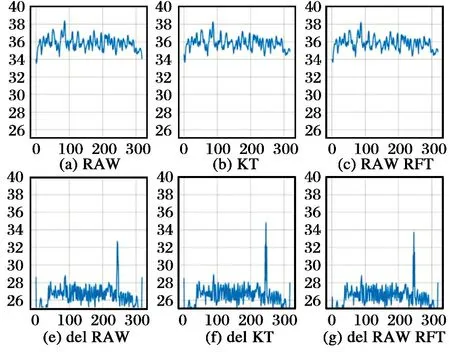
图7 KT及RT弱目标积累性能对比
Fig.7 Accumulation performance of the dim target using the KT and RT algorithm
由于KT属于基于变换的距离多普勒解耦,无需速度先验或者速度搜索,因此相比基于离散网格搜索的RT方法补偿精度更高。相比RT算法,KT在目标的聚焦效果上有2~3 dB左右的提升。
3.2 跟踪及再聚焦

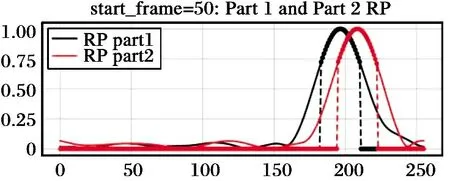
图8 二分法估计加速度
Fig.8 Estimation of the acceleration using the bisection method
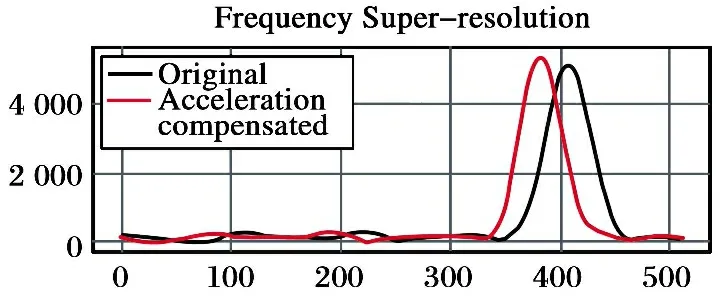
图9 目标序列像的再聚焦
Fig.9 Re-focus of the range profile on the target
图10为在线公开数据集的速度及加速度估计结果,可见FDTR具有较高的估计精度。

图10 加速度及速度再聚焦的估计结果
Fig.10 Estimation accuracy of the acceleration and the velocity after re-focus
实现了最简单的多目标多卡尔曼跟踪器(MTMKF),其优点是便于实现且计算效率高。MTMKF集成CV/CA/CJ模型,通过设计航迹关联算法,并利用距离变化率(Range Rate)排除不符合1重速度模糊假设的航迹;进一步,设计航迹生成(激活)、消亡(休眠)、确认、关联模块,实现多目标跟踪与滤波。
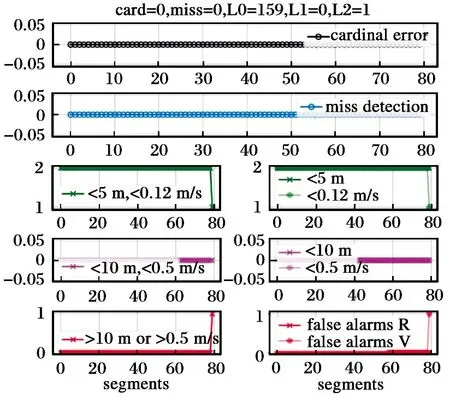
图11 弱小目标检测与估计得分结果
Fig.11 Scores of the detection and estimation of dim targets
3.3 FDTR算法的特点
(1)执行效率高。完整单一数据集(时长2 000 ms),运行时间小于56 s。
(2)序贯检测。仅仅使用25 ms数据生成距离多普勒RD平面内的检测结果,可方便扩展至50 ms、100 ms结构。
(3)集成加速度估计、滤波与补偿。针对过门限的检测数据,采用二分法估计加速度;集成恒定加加速度Jerk运动模型,对当前加速度的估计值进行滤波平滑。
(4)实现多目标多卡尔曼滤波器。该滤波器集成目标的关联、生成、消亡、距离变化率检测等功能,实时性强。
(5)采用CZT算法实现Keystone变换。
(6)纯Python实现,可移植性强。关键模块可用C++进一步优化, 采用面向对象的模块化设计,可方便评估不同的聚焦、补偿和跟踪算法。
3.4 下一步的改进方向
(1)速度估计方法。FDTR首先在RD平面实现弱小目标的积累和检测,随后提取目标所在Doppler单元的距离像,进行相位补偿和速度的精确估计。但是,若存在Doppler单元走动的问题,则会影响相位补偿和速度估计的精度。后续可移除聚类模块,降低检测门限,采用检测前跟踪或检测前聚焦等方法,准确提取粗Doppler单元。
(2)加速度及变加速度补偿。若目标存在机动,则需考虑加速度补偿以提升速度估计精度。可采用二阶KT变换方法(Second-order Keystone Transform,SKT),即
回波相位为
利用
(1+fτ/fc)1/2≈1+fτ/(2fc)
(1+fτ/fc)-1/2≈1-fτ/(2fc)
可得回波相位为
(3)级联的检测后跟踪方法损失目标信噪比,可考虑使用粒子滤波或PHD等检测前跟踪算法。
(4)基于随机有限集的滤波方法。本文采用最简单的多目标多Kalman滤波器实现基于规则的多目标的新生、消亡和数据关联,后续可考虑使用PHD或CPHD实现多目标滤波。
4 总 结
本文采用经典的DBT框架及多目标多Kalman滤波器,通过设计聚焦和再聚焦(相位补偿)方法,以完整有效的系统集成能力,实现实时小目标的检测与高精度估计。本项目属于面向工程的代码设计,采用了数据流编程范式,接口规范、易于修改、扩展性强。
