自动加工工业机器人的设计与实现
2019-01-15卢葵
卢 葵
(韶关市技师学院,广东韶关 512023)
1 自动加工工业机器人的技术路线分析
(1)为确保研发出来的机器人能够自动装配,生产企业需要对生产装配线进行科学合理的规划,并且制定出多元化的设备传输方案。此外,还需要对装配的产品类型、特点进行分析,有针对性的选择出最佳的传输方案。现阶段,在工业机器人自动装配生产线上主要采用异步传输的方式来进行操作,具有设计方案简单、精准定位、成本低等特点,具有一定的实用性和可行性。
(2)对自动化机器人上位的功能进行改善。根据机器人装配零部件的特点来对上位的装配行为进行规范化管理,确保上位设备的功能可以正常发挥。此外,生产制造企业还需要加强试验,对设备的功能进行全面的检验,在试验过程中对其进行完善,确保上位的装配动作正常发挥。
(3)企业需要对现有的装配技术和工作效率进行分析,并且将设备的装配工作进行分解,对装配动作中的缺点和优点进行全面的分析和探讨,及时解决存在的问题,这样才能确保机器人满足智能化和自动化的需求。此外,企业还需要对机器人自动装配操作和人工装配操作进行分析,从而更好地对自动装配生产线进行完善和优化。例如,对现有的装配步骤进行简化处理或者将所有的零件集中在统一的位置上,简化操作流程,可在最短的时间内进行产品的装配工作。
2 自动加工工业机器人的设计
2.1 硬件选择
(1)采用西门子S7系列可编程控制器作为自动加工工业机器人的核心元器件。西门子公司生产的可编程控制器系列较多,S7系列总共有3个系统:S7-400大型可编程控制系统,S7-300中型可编程控制系统和S7-200小型可编程控制系统。对于小型可编程控制器来讲,最常用的型号为:CPU221,CPU222,CPU224和 CPU226。
(2)在小型可编程控制器中,CPU222型号的控制器价格低廉,并且能够满足企业多元化的需求,可与扩展模块进行有效连接。CPU224型产品存储量较大,并且输入输出点多。CPU226和CPU226XM能够满足高端控制系统的多元化要求,功能强大。通过对不同型号的产品进行分析,选择型号为CPU226的可编程控制器来进行操作。
(3)型号为CPU226的可编程控制器,其输入、输出和CPU等均集中安装在机壳内,形成一个整体结构。当系统需要进行存储或功能扩展时,可以直接将扩展模块和基本单元连接即可。输入量的接线端子安装在底部,主要为传感器提供直流电源。西门子整体式可编程控制器具有众多的扩展模块,用户可以根据自身的需求,来进行模块的选择,使得可编程控制器具有更强大的功能。
2.2 CPU的工作方式
CPU前面板上2个发光二极管来对控制器的工作状态进行显示,若绿灯亮,则表面控制器处于运行状态;若红灯亮,则表示控制器处于停止状态;若标有SF的指示灯亮,则表示系统发生故障,可编程控制器停止工作。
(1)STOP。当CPU停止工作时,可以通过编程设备向可编程控制器进行程序的安装。在程序处于编辑或者上传下载的过程中,需要将CPU处于停止状态中,才能进行操作。
(2)RUN。当CPU处于RUN状态时,可编程控制器可以按照设定好的方式来进行程序运行。
2.3 改变工作方式的方法
(1)用工作方式开关来对工作方式进行变换。工作方式开关主要有STOP,TERM和RUN等3个挡位。当开关切换到STOP挡位时,停止对程序进行操作;当开关切换到RUN挡位时,程序启动操作;当开关切换到TERM或RUM挡位时,可以借助WIN32对CPU的工作状态进行设置;当开关切换到STOP或TERM挡位时,接通电源,CPU可自动进入到停止状态;当开关切换到RUN挡位时,接通电源,CPU可自动进入启动状态。
(2)用编程软件来对工作方式进行改变。将开关切换到TERM挡位时,可以借助WIN32编程软件来对工作方式进行设置。
(3)在程序中借助指令来对工作方式进行改变。编程人员在程序中插入STOP指令,CPU可以从RUN状态转换为STOP状态。
2.4 控制过程设计
在对自动加工机器人的设计和研发过程中,需要重视控制流程,根据确定的控制流程图来进行控制器的选择,然后再按设计要求、电路、线路等布局来进行科学合理的设计,这样才能实现自动加工、自动识别等操作。如图1所示。
2.5 设计自动加工机器人检测及执行机构
按照模块化的设计方案将自动加工机器人分为若干个模块,分别进行设计,然后进行拼装。根据系统的要求来进行检测设备和传送设备的选择,这样才能实现自动检测和自动传输的目的。在进行自动加工机器人设计时,需要将机器人基座、气缸连接器件、导向设备等按照规定的方式来进行连接。
2.6 气动驱动系统及控制部分设计
在进行气动驱动系统进行设计时,设计人员需要根据企业实际情况来进行设计,①根据要求选择气动辅助元器件;②进行气动回路的设计,并且绘制出气动原理图;③对气路控制部分进行安装和调试。此外,设计人员需要根据机器人的工作流程进行可编程控制程序的设计。
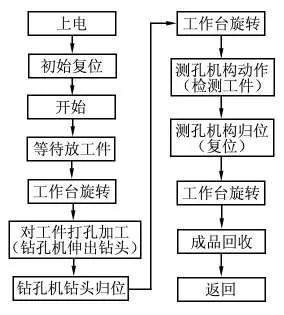
图1 程序设计流程
3 设计时需注意的问题
(1)智能化。将智能化技术运营在自动加工工业机器人中,能够有效的简化操作人员对设备的操作难度,降低操作人员的工作量,确保机器人的工作效率。工业化机器人可以借助智能化系统来对信号或操作进行判断,自动进行设备的加工等方面的操作。不仅有效提高了工作效率,还为企业创造更好的经济效益。
(2)柔性化。目前工业化机器人主要为单臂机器人,灵活性不如人手。若未来能够研发出双臂机器人手,就能够有效的解决机器人灵活性的问题。将双臂机器人运用在工业化生产中,能够有效取代人工操作,简化人工操作和工作量,提高工作效率。但现阶段工业生产中使用的单臂机器人在灵活性和协调性无法满足工业要求。
(3)安全性。由于现阶段机器人技术还不成熟,所生产的机器人会威胁到人生安全。未来需要不断提高机器人技术水平,以确保人身安全。
(4)低成本。虽然工业机器人能够满足工业化需求,但机器人的生产成本较高。因此,需采用多元化的技术来降低工业机器人的生产成本,为企业创造更高的经济效益。
(5)技术融合。随着社会的发展,机器人技术也在不断发展,需要经历一个技术融合的过程。为了机器人技术在发展过程中的创新性,需要从多元化的方面来进行技术突破,全面提高机器人技术水平。
4 结束语
随着我国经济的不断发展,对自动加工工业机器人的需求也在不断增加,发展前景非常好,但由于自动加工工业机器人系统的核心技术被西方国家垄断,增加了成本输出。我国在对自动加工工业机器人系统生产成本的控制和核心技术的研发等方面存在较大难度,为了在机器人市场获得一席之地,需要做好长期发展的战略性目标和方案,自主研发出具有独立知识产权的机器人设备,以有效提高企业的核心竞争力,为企业和社会获得更大的经济效益。
