应用于辐射环境下的蛇形仿生巡检机器人
2019-01-10马浩鹏孙振忠丘强石宏邹佳豪
马浩鹏?孙振忠?丘强?石宏?邹佳豪

摘 要:本文介绍了一种应用于辐射环境下的蛇形仿生巡检机器人的设计,利用仿生物学以及结构动力学原理确定运动结构,由于是在微量辐射空间的应用场景下,选择了合适的防辐射涂层。提出了一种使其外观结构整体达到协调统一以及美观,又确保其自由度空间限度最大化的结构设计方案。本款蛇形仿生巡检机器人以防辐射以及巡检探测为主要特色。在电子电路层面,选择使用了技术相当成熟稳定的舵机控制方案,极大地方便了机器蛇复杂动作的调试。其设计经过了方案选择、整体验证、初代设计、加工组装、调试定型等几步。其中主要工作为结构设计,其决定了之后蛇形仿生巡检机器人的功能性以及灵活稳定性。
关键词:蛇形仿生;辐射涂层;舵机;结构设计
一、引言
本项目面向东莞大朗中国散裂中子源工程环境,检测科学仪器运行时内部辐射有没有泄露以及在附近进行相关科研操作,如果工作人员亲自执行这个工作的就容易因为防护不当而遭受辐射的侵害。因此,研究设计一种能替代工作人员在复杂狭窄的辐射场所近距离完成相关的辐射检测和操作并实时反馈现场图像信息的辐射巡检机器人具有重要的意义。外界辐射会对核心电子元件产生一定的干扰,所以辐射巡检机器人需要对环境的辐射值以及其他环境因素(如:温度,湿度)进行检测。并且其外壳需具备一定的防水性能以及抗辐射性能,采用密度低、强度大、高温稳定性好的碳化硼防水防辐射外壳设计可使其具有较强的抗干扰能力。同时由于辐射环境的特殊性,工作人员无法将机器人取出并进行人为充电,因此,我们采用了无线充电技术对机器人进行充电。
作为一种无腿无鳍的脊椎动物,它的运动方式是十分独特的。无腿无鳍的运动方式没有给生物蛇带来太多的困扰,相反,这种运动方式具有非常高的鲁棒性以及稳定性,使蛇具有多种运动特征,如:蜿蜒爬行,伸缩运动,侧向盘旋行进等运动。蛇形机器人是仿照生物蛇的结构特点与运动机理而研制出的一种高冗余度的仿生机器人。相对于足式、轮式及履带式等类型的移动机器人,蛇形机器人体积较小,运动形式多样,具有较强的地面适应能力,在灾后救援、军事侦察、星际探索等领域具有广阔的应用前景。
本论文首先分析了生物蛇的骨骼结构特征以及其运动方式,在设计前期合理选择关节舵机,防辐射涂层。其次使用soildworks进行三维建模。接着,我们确定了蛇形机器人以集中式控制系统为中心,并在这个的基础上选用了合适的控制硬件,对无线充电技术进行了一定的研究并确定其可行性。利用python以及C++语言编写机器人的运动控制程序、传感器数据反馈程序以及图像采集程序。最终,使用ansys以及进行实物运动测试对机器人的实用性以及可行性进行了分析验证总结。
二、蛇形仿生巡检机器人的结构分析与建模
1.生物蛇的结构特点
如图2.1所示,生物蛇的骨骼由脊椎骨、肋骨以及颅骨各个部分组成,每两个脊椎之间通过一个球窝结构连接在一起,且其相对旋转的自由度十分有限,垂直轴上的旋转自由度一般为10°~20°,而水平轴的旋转自由度甚至仅有几度。蛇的运动结构便是由如此多的小运动结构的叠加,是一种高冗余度自由度的结构,因此蛇的脊椎越小,脊椎数目越多,则其运动越灵活。蛇的身体形状变化则是由蛇每侧相对倾斜的肌肉纤维完成的。另外,蛇皮肤上的鳞片为蛇提供了变化的摩擦特性,对蛇的向前滑行运动起着关键性的作用。
2.蛇形机器人运动学分析
蜿蜒运动、伸缩运动、直线运动和侧向盘旋运动是生物蛇常见的运动类型。
(1)蜿蜒运动。也称蜷曲运动,是生物蛇最快且使用频率最高的运动,在爬行过程中,身体形状呈“S”形,波沿着蛇的身体连续从头到尾部向后传播。依靠着接触面受到的前进方向切向摩擦力与法向摩擦力的不同,不断推动着蛇向前移动。但此运动方式不适合在光滑的平面上进行,但在水中以及粗糙平面上,其产生的推力大,阻力较小,效率较高。
(2)伸缩运动。当运动范围受限,空间较为狭窄的时候,一般采用这种运动形式。蛇将身后部分弯曲成“S”形借助鳞片形成支撑点,再将身体的前部分向前伸长,当蛇头完全伸出时,蛇头会弯曲,以形成一个新的支撑点,使身后部分能够向前移动,不断循环该顺序运动即为伸缩运动。
(3)直线运动。蛇的直线运动类型速度较慢,效率较低。通常为大型的蛇类在围捕猎物的最后阶段中采用的方式。蛇类利用不同肌肉群组的收缩与舒张以产生关节间微小位移来前进。
(4)侧向盘旋运动。侧移运动是生活在松散沙子区域的蛇类(如响尾蛇)采用的运动类型。蛇类从头部关节开始,各关节依次采取“接地—抬起—接地”的运动形式,蛇类将会以行进方向成45°移动,并在地上留下特有痕迹。
(5)蛇形仿生巡检机器人的运动方式。生物蛇的运动与大量的肌肉和神经系统之间的协调十分复杂,特别是其侧向盘旋运动以及伸缩运动,因此本项目只针对蜿蜒运动以及直线运动进行分析。生物驱动的响应以生物电为载体,是分段的。脉冲沿着蛇的身体通过骨髓向后传播,依次激活局部肌肉群,使身体各部分弯曲。即蛇的肌肉组织的激活是瞬时间断的,在短时间内,只有几个特定的肌肉群被激活。因此,我们可以通过“串行”的电机指令对蛇形仿生巡检机器人的关节进行控制。
3.驱动执行元件以及防辐射涂层的选用
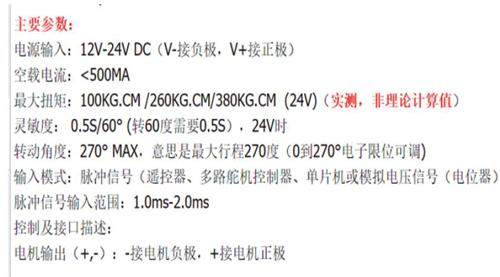
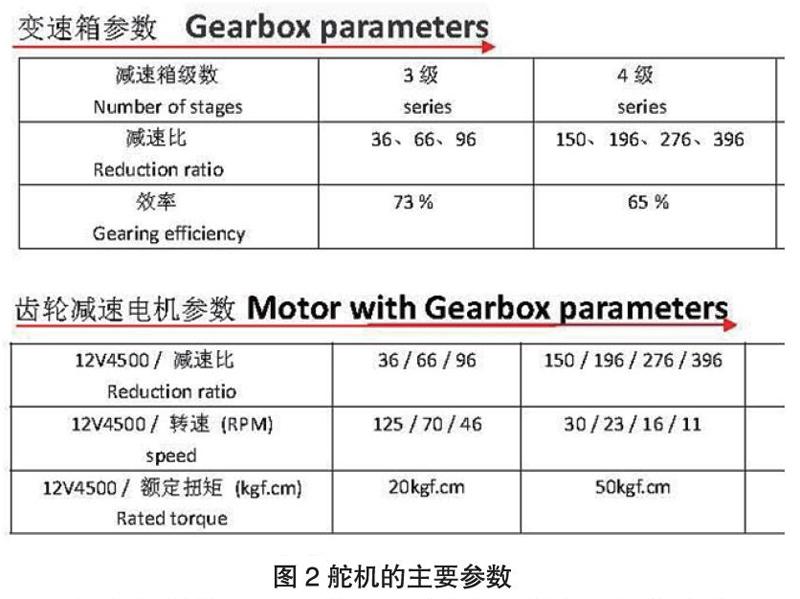
(1)驱动执行元件的选用。作为蛇型机器人的关节,驱动执行元件的选用需保证蛇型仿生机器人宽度的匀称度,还需考虑到蛇的控制器体积以及内部布线时所需要的空间,因此选用了最大扭矩为180KG.CM的狮子王舵机,具体参数以及舵机变速箱参数如下:
(2)防辐射涂层。碳化硼,如图3所示,有着密度低、强度大、化学稳定性好以及高温稳定性的特点。在陶瓷的增强相,耐磨材料、轻质装甲,反应堆中子吸收剂等领域使用较多。除此之外,与金刚石和立方氮化硼相較而言,碳化硼成本低廉,制造容易、因而使用更加广泛。
由于蛇形仿生机器人在辐射环境下工作,辐射对机器人控制系统及所带导航传感装置具有很强的干扰性与破坏性,易于出现难以预料的意外。而在散裂中子源工作环境中,更多得辐射粒子为中子,碳化硼作为良好的中子吸收剂,可以有效避免电子元件在辐射下损耗,所以我们可以外露的地方涂上碳化硼以防辐射,从而更好地保护机器人及其内部的传感器模块。
4.蛇形仿生巡检机器人的建模
蛇形仿生机器人的建模包括了两个方面的设计,分别为:蛇首,蛇身。蛇形仿生巡检机器人重约为5kg,长约为1.5m。3D模型结构图与实物图如图4、5所示。
蛇首处所需容纳的物质较多,除了树莓派,Arduino两大主要控制板之外,还要放置视觉模块,以及吐信机构。吐信机构由一个周转舵机,辐射传感器微型摄像头以及两个摩擦轮组成,一旦遇到狭窄路段,通过舵机提供动力,摩擦轮传动,微型摄像头以及辐射传感器可深入狭窄环境探明反馈视频数据以及检查辐射值数据。在结构设计上,拥有较大的容量以及流线型的外观。由于结构较为复杂,因此采用了通过增材制造技术的光敏树脂材料并在内表面涂覆上碳化硼涂层。
在设计蛇形机器人的机械结构时,主要设计其关节结构。蛇身处模仿生物蛇而制作,而肌肉组织的运动过程比较复杂,因此采用了正交关节的方式将蛇的首尾连接起来,这种关节结构设计简单,但能实现各种步态,而且效率还非常高。关节之间留有密封的空室。于空室内放置有舵机控制板,电源以及传感器,并在其内表面涂覆一层碳化硼。同时,于蛇的底盘中加上了辅助轮以防止在重力作用下机器人因为巨大的滑动摩擦力而导致磨损。为了尽可能减轻重量,外壳材料采用了由钣金工艺制作的铝合金,以及亚克力板。
三、蛇形仿生巡检机器人的控制系统
蛇形仿生巡检机器人的控制系统比较复杂,采用了一块由STM32芯片控制的舵机控制板,一块Arduino UNO板与一块树莓派控制板组成。
舵机控制板为动作控制核心,上位机编程可简化编程,并分担一定的数据处理压力,通过接受Arduino的信号,对舵机进行直接控制。Arduino UNO作为中继控制器,一方面接受传感器,如温湿度传感器、辐射传感器的数据,通过串口通讯的方式,将数据发送给树莓派。另一方面接受树莓派的指令,将数据发送给舵机控制器,间接控制舵机的动作。树莓派作为顶层控制器,用户通过远程连接可直接连接到其linux系统,通过指令读取其接受到的传感器信息,以及发送数据给Arduino UNO控制器,间接控制舵机的动作,与此同时,树莓派的图像处理功能比较完善,图像处理,与图像反馈的功能由其处理控制。
1.传感器的数据反馈,控制,以及图像采集
传感器的数据反馈与图像采集在ssh服务与wifi连接的条件下,在PC端的虚拟机中的Linux系统与树莓派系统互联,在终端上输入一系列代码获取树莓派中的数据或者发送控制指令。
传感器的数据反馈:在连接完成状态下,在新开的终端输入指令确认,在弹出一个窗口中会显示一系列的传感器数据值,如图6所示。该窗口每隔一秒会显示温湿度,每隔一分钟会显示辐射值(CPM 单位:次/分钟),20CPM以下为正常环境下的辐射值,当辐射值超过20CPM说明辐射值超过标准值,对人体将有一定的危害。
动作控制:在终端中输入指令,启动服务后将出现一窗口,如图7所示,可由键盘输入特定的指令使蛇形仿生机器人进行特定的动作,可执行蜿蜒爬行,前进,后退等11个常规动作指令。
图像采集:机器人的图像显示模块共两个:一个为蛇眼部位的摄像头,负责宽阔环境下的视觉信息反馈,一个为蛇信处的微型窥探摄像头,负责蛇身无法进入的狭小路段的图像处理。如图8所示,为处于蛇眼部位的摄像头所采集的数据,可自动识别物体,以及颜色识别。
四、结语
本论文采用了蛇形仿生结构解决了轮式机器人难以适应崎岖路面和小阶梯的缺点,提高了机器人在复杂环境下的机动性。加入了两大视觉识别模块,提高了工作人员对环境的辨识度。而检测环境温湿度以及辐射量,可以大大降低救援和工作的风险。在重要的内表面涂上碳化硼,可以很好地防輻射,保护机器人自身。
参考文献:
[1]丑武胜,刘源,杨光.核辐射探测机器人故障容错控制方法研究[J].微计算机信息,2010,26(29):1-3+9.
[2]王生栋. 蛇形机器人结构设计与运动控制研究[D].哈尔滨工业大学,2016.
[3]蒋湘军. 蛇形机器人步态研究及在桥梁缆索检测中的应用[D].华南理工大学,2011.
“广东大学生科技创新培育专项资金”资助:项目号Pdjhb0493)
