移动机器人目标识别系统研究
2018-11-21宋广春王红星李坚王卓陈虎
宋广春 王红星 李坚 王卓 陈虎

【摘 要】移动机器人实现目标识别是机器人发展过程中非常重要的一个环节。本文主要研究内容是在移动机器人上通过摄像机连接视频采集卡获取外界视频信息,然后使用MATLAB编程软件对所选的图像进行图像处理,采用图像和几何外形相结合方法对目标进行识别,其中摄像头标定采用张正友标定法。仿真和实验效果都较理想。
【关键词】移动机器人;基于颜色和外形相结合目标识别;摄影机标定
中图分类号: TP242 文献标识码: A 文章编号: 2095-2457(2018)20-0097-002
DOI:10.19694/j.cnki.issn2095-2457.2018.20.042
【Abstract】It is very important for mobile robot to realize target recognition in the process of robot development. The article describes the use of video capture card to capture external video information on a mobile robot, and then uses MATLAB programming software to perform image processing on the selected image. The image and geometric shape are used to identify the target. The camera calibration uses Zhang Zhengyou. Calibration method. Both simulation and experimental results are ideal.
【Key words】Mobile robot; Combined with target recognition based on color and shape; Camera calibration
0 引言
通過视觉,人类可以感知外界物体的大小、特征、颜色、状态等信息,视觉是人类传递信息的重要媒介和手段。于是人类需赋予机器人人类视觉的功能,才能让机器人去模仿人类的各种行为。基于单目视觉传感器的原理,本文中使用一个索尼EVI-D100P摄相机,结构简单、计算简洁、标定容易等优点深受大众喜爱。
1 实验原理
1.1 张正友摄像机标定
张正友此前提出了一种介于传统标定和相机自标定的标定方法[1]。使用相机从不同的方位拍摄标定版,一般取十幅图片或者二十幅图片,再使用MATLAB软件自带相机标定工具对图像处理,再计算出相机的内部参数矩阵。
在标定板上的每一个特征点(Harris算法提取的角点)与其图像上相应的像点之间存在一一对应关系,这个关系可用单应矩阵表示,所以对于每幅图像,就都可以确定一个单应矩阵,这就为内部参数的求解提供了约束条件。该算法是基于两步法的思想,即先由一个线性解法求出部分参数的初始值,然后考虑径向畸变并基于极大似然准则对线性结果进行非线性优化,最后利用计算好的内部参数和单应矩阵求出外部参数[2]。具体的标定数学推导和标定步骤可参考[3]。
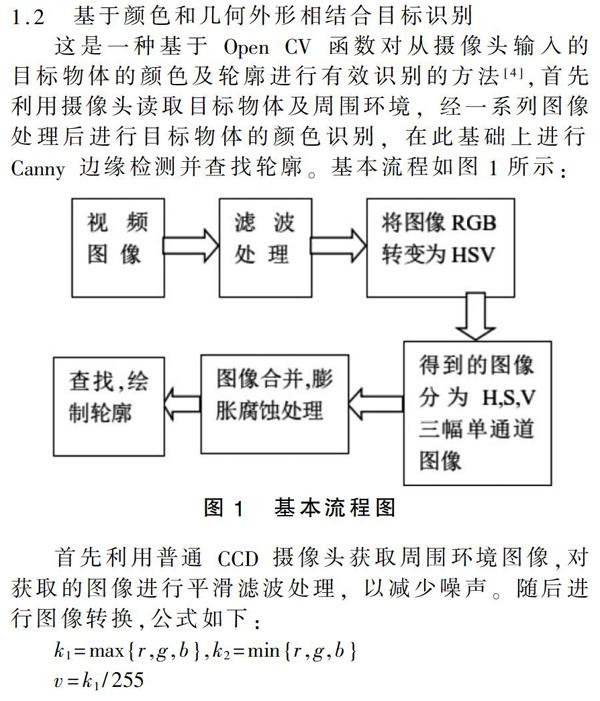
1.2 基于颜色和几何外形相结合目标识别
接下来对得到的HSV图像进行通道分离,分离为3个单通道图像,分别为H(色度通道图像)、S(饱和度通道图像)及V(亮度通道图像)。
设定6个调节参数:Low Hue(色度下限值)、High Hue(色度上限值)、Low Saturation(饱和度下限值)、High Saturation(饱和度上限值)、Low Brightness(亮度下 限值)、int High Brightness(亮度上限值)。通过此法可确定想要的目标的颜色HSV特征值。
图像生成及图像形态学处理:程序采用了先膨胀后腐蚀的方法,有效去除了被检测到物体的边缘噪点及其他噪声影响。
最后用Canny算法查找和绘制轮廓。
2 实验
2.1 标定过程和结果
2.2 基于颜色和几何外形相结合目标识别
由于本次被测物体较小且可能摄像机与被测目标物体较远,所以会在成像平面上成像较小,所以边缘检测到的圆也比较小甚至为不规则的圆,为保证能够准确检测到目标物体,所以本课题在设置对应阈值时设置的数值较小。
通过边缘检测对颜色分割后物体的边缘提取,接下来通过霍夫圆变换提取几何圆,通过数学运算输出中心坐标,效果图如图3。
3 总结
(1)本论文在本文所研究的定位系统采用了目前世界上比较流行的图像采集卡和索尼摄像机来完成视频的读取,在此基础上实现了各种数字图像的算法和图像的处理。
(2)本文应用MATLAB软件开发平台进行系统的软件部分设计,编写了摄像机标定的程序、对图像处理的程序以及对目标提取来完成识别程序。而且此做法达到了预期的要求。
对视频中提取出来的图像存在不足之处:由于是分开实行的,没有做到一步到位,稍显繁琐。摄像机标定过程是基于张正友的标定板法,在此过程不能确定相机的内参数矩阵的准确性,因为对标定板的拍摄是存在不良操作的,移动相机的过程会影响图片的提取。
【参考文献】
[1]霍长娟,张桦,邓熹.几种摄像机标定方法的比较[J].天津理工大学学报,2007,23(5):75-77.
[2]游迪,杨世洪,赵汝进,等.高阶径向畸变对张正友平面标定算法精度的影响[J].计算机与现代化,2016(8):118-122.
[3]迟德霞,王洋,宁立群,等.张正友法的摄像机标定试验[J].中国农机化学报,2015,36(2):287-289.
[4]侯宾,张文志,戴源成,田洪强.基于OpenCV的目标物体颜色及轮廓的识别方法[J].现代电子技术,2014,37(24):76-79+83.
