海洋锚泊定位系统操作控制及布放实践
2018-10-31霍文军
霍文军
(中国人民解放军海军研究院,北京 100161)
0 引言
对于各种大型工程船舶以及海洋辅助救助船舶而言,锚泊定位系泊系统是船舶定位的常用技术。锚泊定位涉及多个操控和管理环节,包括定位布锚方式、收放拉紧技巧、工作过程监测和快速响应等,对其进行深入研究和系统总结,以规范操作、并尽快实现工程化应用,是海洋工程领域的一个课题。文章介绍了系泊定位系统相关装置的规范操作和作业控制流程,以实现安全、高效的锚泊定位系统布放作业。
1 系统组成及工作原理
定位锚泊系统主要由绞车本体、液压泵站及电控系统组成。绞车本体主要由卷筒、带式制动器、离合器、开式齿轮、齿轮箱和变频电机组成。液压泵站主要提供带式制动器、离合器的操作动力,并为应急释放提供动力源。绞车的电控系统包括本地控制系统和远程控制系统两部分。本地控制系统包括本地控制台、变频控制柜、制动电阻箱等。在本地控制台可以实现绞车的完整功能操作。远程控制系统由集中控制台和闭路电视监视装置组成。闭路电视监视装置分为显示器和摄像头,显示器集成在控制台上,摄像头布置在绞车周围以获得绞车工作时的视频图像。集中控制台为低权限控制台[1-2]。在集中控制台上可以实现全船 4台绞车的操作。电控系统控制示意图如图1所示。
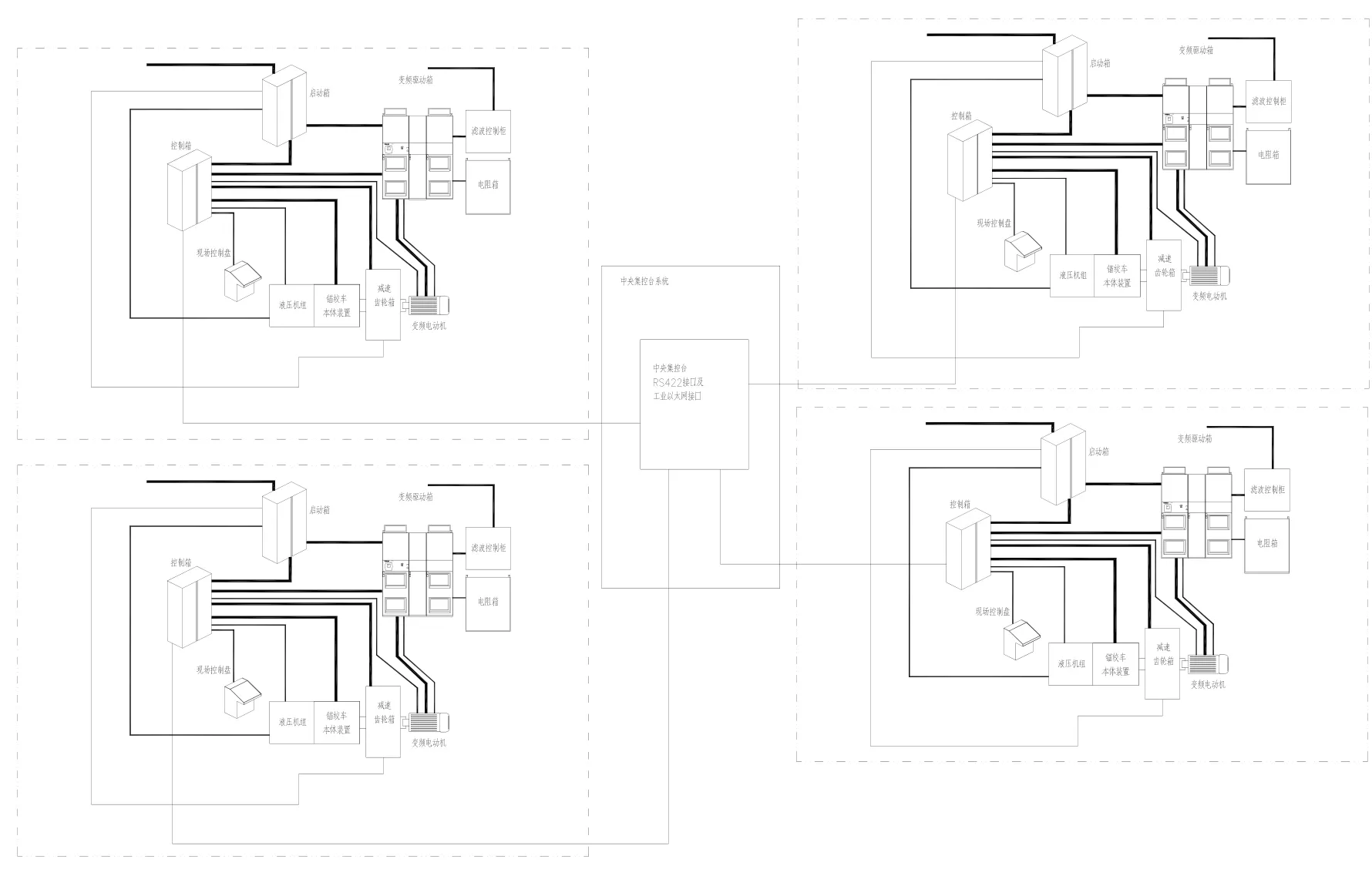
图1 整船电控系统控制示意图
电控系统和机械结构主要具备以下几个功能及特性:1)绞车拉力速度和缆绳放出长度检测;2)刹车驱动电机关联控制,实现动作功能同步;3)使用F-Safe型制动器的带式刹车和盘式刹车;4)绞车动作状态以及制动器、离合器动作状态实时检测;5)具有紧急停止按钮,实现紧急情况下的快速停车;6)失电保护功能,在失电情况下能自动切断电源,元器件复位;7)报警指示和功能状态指示,为操作人员提供安全警示和操作提示。
2 操作控制方式与主要功能
系统操作主要涉及2个不同功能的站位:1)在绞车旁进行单机现场操作控制,通过机旁控制台完成操控功能;2)全船多机集中控制,通过集中控制台完成操控功能。在使用单机操作方式时,与其他锚点的操作控制没有数据关联。在使用集中控制方式时,操作人员在每个锚绞车的现场操作机位都可以观察监测到其他锚点锚绞车的绳索张力变化情况[3-4]。
触摸屏监视界面如图 2所示,内容包括绞车工作状态、变频电机工作状态、刹车状态和离合器状态等。在集中控制台上操控绞车时,1名操作人员可以同时操作4台绞车,操作界面实时提供了4台锚绞车的状态信息。操作人员数量得以减少,布锚效率得到了提高。
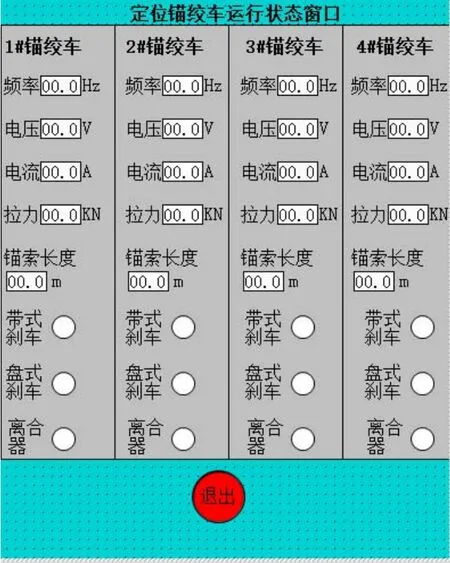
图2 现场操作台监控画面
集中控制台与每个绞车之间采用网络连接,可实时交换数据,也可实现多绞车的联动控制。集中控制台的监视画面如图3所示。

图3 集中控制台触摸屏监视画面
定位锚绞车的主要包括下述功能。
1)动力收放锚。操纵控制手柄,使电机慢慢转动,同时松开电机电磁刹车,观察绞车所有状态在面板上是否显示正常。操作调速手柄时,观察所有刹车是否处于完全脱开的位置。手柄角度调至最大时,收缆速度最大。收缆过程中,显示屏上会显示抛出缆绳的长度、速度和张力。缆绳达到预定长度后,可以通过减小调速手柄操作角度来降低收缆速度,调速手柄扳回到中间位置,电机电磁刹车实时制动响应。绞车运行过程中,操作人员要注意监测齿轮箱、液压系统等的运行情况,例如是否出现温升、噪音、漏油等现象。若有异常,应停车检查处理。收放缆结束后,要及时将带式刹车刹紧。若需要多次分多段收缆时,按上述步骤多次操作。收放缆过程中操作人员禁止离开操作岗位。
2)自由放缆。脱开离合器将带式刹车松开,抛出缆绳。放缆过程中,显示屏上应显示抛出缆绳的长度、速度和张力。当抛出缆绳长度达到抛出要求时,停止放缆并及时将带式刹车刹紧。
3)紧急停止。在绞车机旁操作台上,按下“紧急停止”按钮,带式刹车刹紧,液压泵站停止运行。
3 实船布放操作实践
3.1 布锚流程确认
根据海域的实际海况,结合锚泊定位的功能需求,确定定位锚系统布锚程序、核定操作流程。根据作业任务要求,确定船舶定位原点、锚头抛放坐标点、缆绳最大放出长度,确认绳索满足作业要求。核定作业操作流程,协调船舶前后移船速度,确定锚绞车的抛锚操作规范,确定锚绞车的操作与船舶移动的协调方法,这项工作一般由船长组织。设备操作员观察记录设备工作状态,根据操作指令进行锚机的收放操作,并及时报告设备工况以及锚机的收放长度、缆索拉力等信息。
3.2 布锚海况时机选择
在首次布锚时,应该对定位锚绞车系统进行抛锚、收锚的操作调试,确认设备处于正常状态。钢缆锚绞车应事先对钢索进行放气操作,使钢索的扭转力得以释放。
3.3 布锚前准备
准备好对讲机,根据要求穿戴好救生衣,确定定位锚绞车系统设备主操作人员和辅助操作人员,清除工作区域内的障碍物,做好安全防护。全部准备工作应获得指挥人员的认可。
3.4 布锚、起锚过程
锚绞车编号如下:左前锚机是 2#锚机,右前锚机1#锚机,左后锚机是4#锚机,右后锚机是3#号锚机。在陌生海域布锚时,应该模拟布锚航迹。
1)布锚程序。使用船上的定位系统确定定位点及4个锚点。船舶以任意航向到达 3#锚位并布下右艉锚3#。按图 4a)所示航线,利用主机及艏侧推装置的辅助,正车驶向4#锚位。在航行过程中,右艉锚3#锚索放松,使其自由放出。如图4b)所示,船舶到达4#锚位后布下左艉锚4#,同时船艏转向图示航线,利用主机正车驶向2#锚位,在此过程中,左艉锚4#锚索放松,使其自由放出。右艉锚 3#锚索则随船舶位置的变化而收紧或放松。如图4c)所示,船舶到达2#锚位后布下左艏锚 2#,同时按图示航线,利用锚绞车及艏侧推装置驶向1#号锚位附近,布下右艏锚1#,见图4d)。调整钢缆,把船位调到指定定位点,船舶在定位点处定位,见图4e)。所有定位锚锚索按所需张力收紧,待锚入土稳定后,再将锚索调至合适的预张力,至此布锚作业完毕。
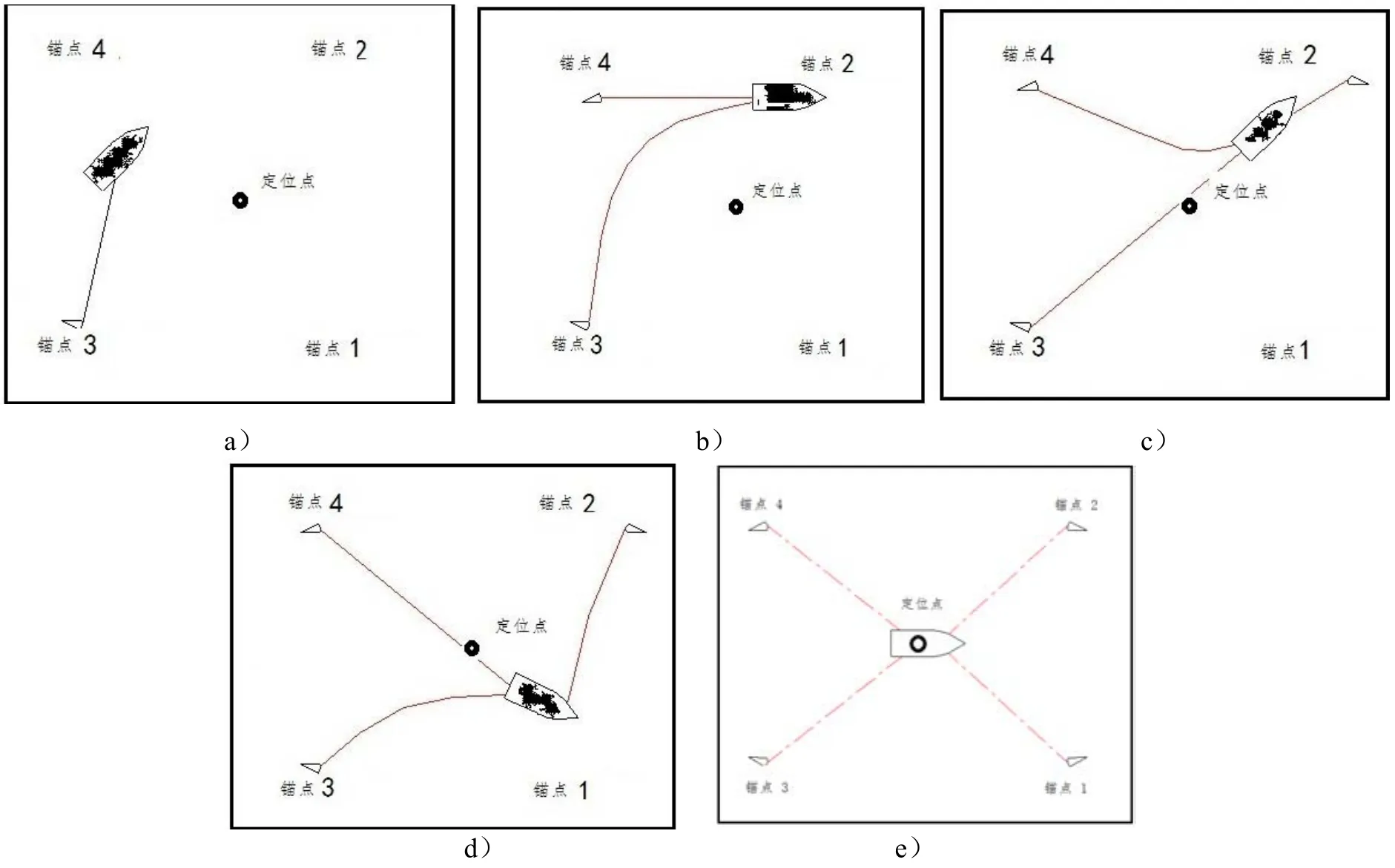
图4 布锚程序示意图
2)起锚程序。首先起右艏锚 1#,同时左艉锚 4#锚索放松,使其随船舶移动自由放出;右艉锚 3#锚索视实际情况回收或放松;左艏锚 2#锚索视实际情况而放松;完成1#锚收存后,起左艏锚2#,同时右艉锚3#锚索放松,使其随船舶移动自由放出;左艉锚4#锚索视缆绳受力情况适时回收,一般保持在额定拉力的15%的范围内即可。完成2#锚收存后,起左艉锚4#,右艉锚3#锚索视缆绳受力情况适时回收,一般保持在额定拉力的15%的范围内即可。最后起右艉锚3#,全部收锚过程完成。
3.5 后续维护
定锚钢缆从导向器到定位锚绞车的路径内铺设三防布。三防布的宽度为2 m,待起锚时,用淡化水冲洗钢缆表面的泥沙。在冲洗干净的钢丝绳上涂上事先准备好的钢丝绳油,尽量涂抹均匀。
4 结束语
通过工程实践,不断总结锚泊定位系泊系统的布锚方式以及相关的操控和管理经验,逐步形成系统、规范、安全、高效的操作规程,对海洋工程作业具有较为广泛的推广意义。未来,这项工作还将结合计算机人工智能的应用,以追求更高效的操控。
