手术机器人发展现状及定位精度的检验方法研究
2018-10-29北京市医疗器械检验所医疗器械检验与安全性评价北京市重点实验室101111向华闫旭
北京市医疗器械检验所 医疗器械检验与安全性评价北京市重点实验室(101111)向华 闫旭
机器人技术是二十世纪人类科学技术,特别是计算机、自动控制等现代技术发展的重要产物之一,80年代中期被引入手术治疗,与传统医疗器械与信息技术相结合,辅助外科医生开展手术治疗,其优点在于适合执行精确和重复性高的手术任务。
1 手术机器人的发展现状
手术机器人的出现使得外科手术趋向于微创化、精准化,将手术的创伤尽可能降低,在获得理想的手术效果的同时减少了病人的痛苦,与传统的外科手术相比而言,具有出血少、创伤小、安全可靠、术后恢复快、定位精度高、稳定性好等优点。
1.1 手术机器人的分类 目前的手术机器人主要包括四类:神经外科机器人、骨科机器人、腹腔镜机器人、血管介入机器人。手术机器人涉及到图像处理、视觉定位与跟踪、路径规划、主从控制操作等关键技术问题。
1.1.1 神经外科机器人 神经外科手术机器人主要用于对脑部病灶位置精确的空间定位以及辅助医生夹持和固定手术器械等。国外典型的神经外科机器人有英国Renishaw公司NeuroMate、美国Pathfinder Technologies公司的Pathfinder和法国Medtech公司的Rosa机器人。
北京航空航天大学机器人研究所1995年率先开始进行机器人辅助神经外科手术的研究,并在此领域取得突破性进展[1],北航和海军总医院神经外科中心合作研制出一套机器人辅助脑外科手术导航系统,该系统包括手术规划和导引软件模块,实现了术前规划,对机器人在手术路径与周围重要器官的相对位置进行仿真,快速精准地定位病灶靶点,引导机器人到规划位姿,辅助医生进行手术操作。北京柏惠维康科技有限公司研制的立体定向神经外科手术机器人Remebot,包含六轴机械臂和一个CT/MRI视觉成像系统,这使医生能够进行更加精确的神经外科微创手术。
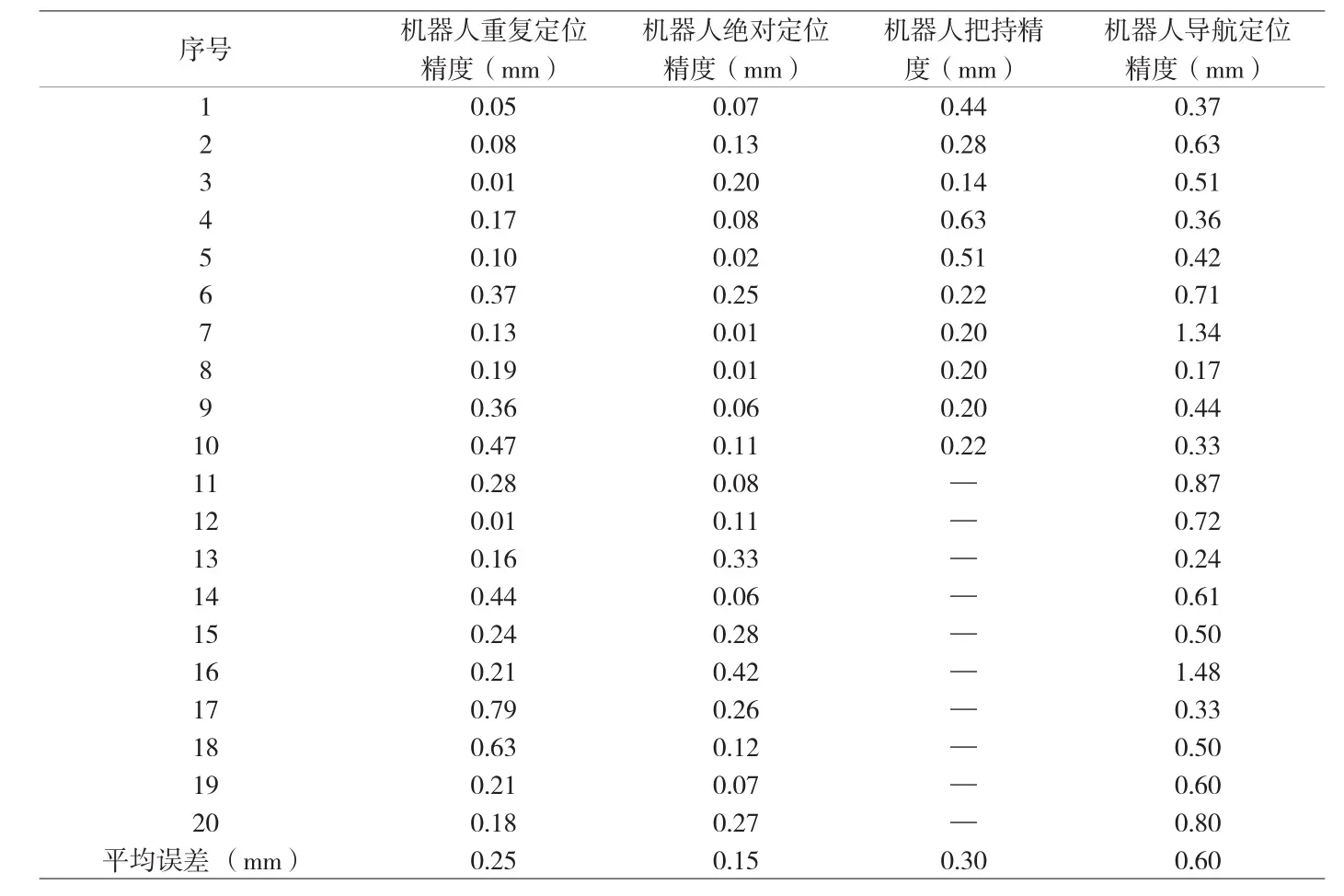
附表 颅颌面手术导航机器人定位精度检验结果
1.1.2 骨科机器人 将机器人技术运用于骨科手术的研究最早开始于1992年,主要目的是完成髋关节置换手术过程中的手术规划和定位。国外有名的骨科机器人包括美国Curexo公司制造的Robodoc,主要用于膝关节和髋关节置换手术,美国Mako Surgical公司开发的RIO,主要面向膝关节和髋关节置换手术,以色列Mazor机器人公司的手术机器人产品Renaissance主要应用于脊柱外科领域。
北京天智航医疗科技股份有限公司是国内唯一一家专业从事骨科医疗机器人产业化的公司,成功研制出国内第一台拥有完全自主知识产权的骨科机器人产品,并于2010年获得了产品注册许可证,成为国内唯一、全球第五家获得医疗机器人注册许可证的公司,填补了国内空白。2010年以来天智航的骨科机器人已经应用于中国的10多家医院,完成了大约200台手术。公司的第三代骨科手术机器人“天玑”,是国际上唯一能够开展创伤骨科、脊柱外科手术的骨科机器人系统。
1.1.3 腹腔镜机器人 腹腔镜机器人被用于完成心脏外科、泌尿外科、胸外科、肝胆胰外科、胃肠外科、妇科等相关的微创腹腔镜手术。当前,国外代表性的腹腔镜机器人有美国Intuitive Surgical公司研发生产的Da Vinci手术机器人、英国Freehand公司研发的FreeHand手术机器人,意大利SOFAR S.p.A公司研发的Telelap ALF-X机器人。
哈工大机器人研究所2013年研制成功的“微创腹腔外科手术机器人系统”,通过了国家“863”计划专家组的验收,打破了进口达芬奇手术机器人的技术垄断。博实股份是哈工大机器人研究所产业化基地、哈工大机器人产业化平台,研究人员针对微创外科手术的多种术式,在手术机器人系统的机械设计、主从控制算法、三维(3D)腹腔镜与系统集成等关键技术上都进行了重要突破,并申请了多项国家发明专利,未来计划提供腹、胸、盆腔外科手术一揽子解决方案,覆盖普通外科、胸外科、泌尿外科、妇科等十余个外科手术科类。
1.1.4 血管介入机器人 血管介入手术是指医生在数字减影血管造影成像(DSA)系统的导引下,操纵导管在人体血管内运动,将导管从病人穿刺部位送至靶血管,对病灶进行治疗,达到溶解血栓、扩张狭窄血管等目的[2]。将机器人技术结合到血管介入手术中即产生了血管介入机器人。
血管介入机器人发展刚刚起步,其中,美国Hansen Medical公司的Sensei Xi可用于心血管介入手术,国内北京航空航天大学和中国科学院自动化所就导管推进机构、导管末端力反馈等方面开展相关内容的研究,但目前还未形成产品。
1.2 手术机器人列为国内高端医疗器械重点研发对象 国家高度重视高端医疗器械的国产化工作,明确提出要提升国产高端医疗的市场占有率。其中,手术机器人被列为国内高端医疗器械重点研发对象,近年来密集出台了多项政策来推动手术机器人的技术发展。
科技部《服务机器人科技发展“十二五”专项规划》中,明确了重点发展公共安全机器人、医疗康复机器人、仿生机器人平台等任务;《中华人民共和国国民经济和社会发展第十三个五年规划纲要》中明确将“手术机器人”列为“高端装备创新发展工程”中重点发展的机器人装备;《中国制造2025》在“生物医药及高性能医疗器械”重点领域提出要“提高医疗器械的创新能力和产业化水平,重点发展影像设备、医用机器人等高性能诊疗设备”;北京市科委2015年6月发布的《北京市科学技术委员会关于促进北京市智能制造机器人科技创新与成果转化工作的意见》明确要求突破服务机器人,尤其是医疗健康服务机器人的技术瓶颈;国务院2016年3月发布的《关于促进医药产业健康发展的指导意见》指出要加快医疗器械转型升级,重点开发医用机器人,健康检测,远程医疗等高性能诊断设备;工信部等部门2016年4月发布的《机器人产业“十三五”发展规划》中要求大力推进服务机器人在医疗、助老扶残、康复等领域的推广应用等等。
1.3 手术机器人定位精度的重要性 随着国内愈来愈多的企业加入到手术机器人的研发生产的队伍中,手术机器人技术不断得到提升和发展,我国手术机器人技术正在从跟跑、并跑,逐步转变为领跑的状态。
2 手术机器人定位精度检验现状
目前,各研发生产企业的手术机器人的定位精度的选取及检验方法由各企业参照工业机器人标准以及国内外手术机器人定位精度检验方法并结合各自产品特点来确定,用于定位精度检验的体模大部分是各单位自己研发定制的。
3 手术机器人定位精度检验方法及检验结果
我所近年来承检了系列手术机器人,包括:北京天智航医疗科技股份有限公司研制的骨科手术导航定位系统,Mako Surgical Corporation研发生产的骨科手术导航系统,Intuiitive Surgical公司研发的达芬奇手术机器人等等,针对北大口腔医院、北京理工大学联合研制的颅底及面测深区疾病精确微创诊疗机器人,本文作者参考了上述手术机器人的注册检测及委托检测的产品技术要求(产品标准)与该机器人的研发人员展开合作,共同研究建立了相关定位精度的检验方法,下面进行详细介绍。
3.1 颅颌面手术导航机器人定位精度检验方法
3.1.1 机器人重复定位精度 调节固定在桌上的XYZ三轴平台,使得平台上的标识点对准针尖所在位置,记录此时的平台读数为A0(XA0,YA0,ZA0),软件记录此时机器人位姿A;将平台调节至不妨碍机器人运动的位置;通过机器人控制系统控制机器人运动到空间中某特定点B,软件记录此时机器人位姿B;调节XYZ三轴平台,使得标志点仍然对准针尖所在位置,记录此时的平台读数为B0(XB0,YB0,ZB0);通过控制机器人运动到A,调节固定在桌上的XYZ三轴平台,使得平台上的标识点对准针尖所在位置,记录此时的平台读数为A1(XA1,YA1,ZA1);通过机器人控制系统控制机器人运动到点B;调节XYZ三轴平台,使得标志点仍然对准针尖所在位置,记录此时的平台读数为B1(XB1,YB1,ZB1);重复控制机器人运动到A点及B点共计20次;计算空间距离A0Ai(i=1,2…20),B0Bi(i=1,2…20),即为机器人重复定位误差,每组误差均应小于1mm;计算平均误差,作为机器人重复定位精度结果。
3.1.2 机器人绝对定位精度 调节固定在桌上的XYZ三轴平台,使得平台上的标识点对准针尖所在位置,记录此时的平台读数为A(XA,YA,ZA),记录此时软件上该点的空间坐标TA(XTA,YTA,ZTA);将平台调节至不妨碍机器人运动的位置;通过机器人控制系统控制机器人运动到空间中某任意点B,记录此时软件上该点的空间坐标TB(XTB,YTB,ZTB);调节XYZ三轴平台,使得标志点仍然对准针尖所在位置,记录此时的平台读数为B(XB,YB,ZB);计算点A与点B之间的欧几里得距离,记为d;计算点TA与TB之间的欧几里得距离,记为dT,则|d-dT|即为机器人系统的绝对定位误差,dT应小于1mm;变换机器人位姿,重复上述步骤共20次,每组误差均应小于1mm;计算平均误差,作为机器人末端定位支架的绝对定位精度结果。
3.1.3 机器人把持精度 将穿刺末端固定在机器人的末端快速接口上;调节固定在桌上的XYZ三轴平台,使得平台上的标志点对准针尖所在位置,记录此时的平台读数A(XA,YA,ZA);将平台调节到不妨碍拆卸末端的位置,将末端卸下;再次将末端安装至机器人的末端快速接口上;重新调节XYZ平台,使得标志点对准针尖所在位置,记录此时的平台读数B(XB,YB,ZB);两次凭条读数计算的欧几里得空间距离|A-B|即为快速接口的重复定位误差,应小于1mm;重复上述步骤10次,每组误差均应小于1mm;计算平均误差,作为机器人把持精度结果。
3.1.4 机器人导航定位精度 模拟手术使用情况,由于病人肿瘤位置在头部的不同位置,将机器人运动空间按照病床横方向分为左、中、右三个区域,每个区域跨度100mm,然后选取其中第一个区域;使用导航仪在该区域靠近中间位置完成机器人的空间注册;将XYZ平台固定在机器人下方的工作空间内;设定XYZ平台的一个位于所测试区域中的空间点A(XA,YA,ZA)为目标点,用导航仪的手柄指向该点并设定为机器人的目标点,然后将XYZ平台调节至不影响机器人运动的位置;使机器人在导航仪引导下自动移动到目标位置;调节XYZ平台使标志点对准机器人的末端,记录此时的平台读数为B(XB,YB,ZB);计算点A与点B之间的欧几里得空间距离,即为机器人在导航仪下的导航定位误差,应小于1mm;在该区域内重复上述步骤20次(左、中、右区域分别测试6、8、6次),每组误差均应小于1mm;计算平均误差,作为机器人导航定位精度结果。
3.2 颅颌面手术导航机器人定位精度检验结果,详见附表。
4 展望
由于手术机器人的标准及审评指导原则等规范性文件的缺失,导致国家对手术机器人的安全及性能的监管存在较大的风险,为了保障人民的用械安全以及进一步推动手术机器人的行业发展,国家已启动医疗机器人的标准体系构建及标准的研究制定等工作。我们应该从以下两方面开展工作:①加强手术机器人标准体系建设 开展手术机器人标准体系的顶层设计,构建和完善机器人产业标准体系,加快研究制订产业急需的各项技术标准,支持机器人评价标准的研究和验证,积极参与国际标准的制修订。②建立手术机器人检测认证体系 建立并完善以国家手术机器人检测与评定中心为代表的机器人检验与认证机构,推动建立机器人第三方评价和认证体系,开展机器人整机及关键功能部件的检测与认证工作。
可以预见,不久的将来,在研究机构、医疗机构、指导标准委员会、行业协会等机构牵头组织下,辅以高校、研发机构,我国将形成一些通用标准以及临床使用规范,明确手术机器人应满足的功能和安全的各项条件。
