一种二分迭代实时声线修正算法
2018-10-11龚浩亮陈波万莉莉江南
龚浩亮,陈波,万莉莉,江南
一种二分迭代实时声线修正算法
龚浩亮,陈波,万莉莉,江南
(昆明船舶设备研究试验中心,云南昆明 650051)
为提高对水下目标的定位精度,提出并实现了一种二分迭代实时声线修正算法。首先通过二分迭代法快速搜索出水下声源所发出的定位声信号传播声线的初始掠射角,然后以该初始掠射角对应的唯一声线为基础,根据斯涅耳(Snell)声线折射定理计算得到声源与水下接收阵元的距离值,最终利用与声线相符的三路测距值进行交汇解算,完成实时声线修正定位。湖上试验结果表明,该算法简单易行、运算速度快,能够满足实时修正处理的要求,在复杂水文条件下提高了水声定位系统的定位精度。该算法具有良好的工程实用性和通用性,可推广应用于同类水声跟踪定位系统。
二分迭代法;实时声线修正;Snell定理;初始掠射角
0 引 言
折射效应导致了声波在水下的传播路径(声线)发生弯曲。水下声速分布沿垂直方向变化越快,声线弯曲的程度就越大。对于利用时延测距交汇进行定位的水声定位系统,声线的折射弯曲造成了水声定位信号从发射点到接收点的传播时延大于理想的直线传播时延,在同一个声线跨度内,声线弯曲程度越大,传播时延越大[1]。在一些水声定位系统中,由于水下被测目标在水平和垂直方向上的运动变化跨度较大,时延测距交汇定位解算时若不对声线弯曲带来的影响进行修正处理,则系统的定位精度将难以有效提高。
对于利用测距交汇进行定位的水声定位系统,工程中常用的处理方法是通过总结以往试验经验,针对不同季节或不同时段选定一个声速值作为定位解算的平均声速,然后将声线近似为直线处理。该方法简单易行,可满足一定的定位精度要求。但在远距离定位解算时,平均声速不准确将使用来定位的球面半径(测量距离)出现伸缩,引起定位误差。选定的平均声速偏差越大,造成的定位误差就越大,这直接导致了水声定位系统的定位精度难以提高,甚至可能使定位方程无真解[1]。总之,采用传统的方法难以找到一个在远近不同距离上均可满足定位精度要求的理想声速值。针对上述利用平均声速来进行近似处理所存在的问题,工程应用中常采用以下两种方法来进行声线修正定位。
(1) 近似函数逼近法:对于定位精度要求不高的水声跟踪定位系统,或者当水下声速分布情况较为简单时,可采用近似函数来逼近声速分布或模拟声线形状[2],定位前也无需进行声速测量。但是对于复杂多变的水文条件,难以找出有效的近似函数,系统定位精度仍然受限[3],因此该方法实用性和通用性较差。
(2)“查表法”:主要思想是将水声定位系统的测距时延、定位声源深度及声源至接收阵元的空间距离(即定位交汇的球面半径)进行一一对应,定位前先计算出声线修正数据表格,定位解算时,通过测量得到的水声传播时延和定位声源深度值,就可以采用查表的方法得到定位声源与接收阵元之间的距离,再利用查表得到的距离实现定位解算。“查表法”操作简单,可预先离线计算出表格数据,缺点是查表精度(空间位置分辨力)的高低决定了数据表格的大小。当查表精度要求较高时,预先计算和存储的查询表格必然为一组海量数据,导致查表效率低,难以满足实时性处理的要求[1]。
随着声速测量水平的提高及测量数据的积累,针对上述方法在实际应用中存在的问题以及当前同步式水声定位系统所提出的越来越高的定位精度要求,本文提出实时声线修正算法,将系统的定位水域按深度变化分层,定位时利用当前测量获取的分层声速值,基于斯涅耳(Snell)定理应用尝试法实时搜索出水下声源发射声波的初始掠射角,根据初始掠射角对应的唯一声线路径计算出目标至水下基阵接收阵元的距离,最后通过测距交汇原理实现定位解算,而不是直接利用系统信号处理设备估计获取的定位信号的时延值来进行测距交汇定位。
1 同步式水声定位系统定位原理
使用同步式水声定位系统时,要求水下被定位的目标装载合作声源,合作声源的信号发射时钟与系统信号接收处理机的时钟同步。水下基阵各阵元接收合作声源发射的定位水声信号进行同步测距,然后基于式(1)中的球面交汇(测距交汇)原理实现水下目标的定位:


2 算法原理及流程
2.1 Snell定律
按式(1)进行定位解算时,将水下定位区域视为单一媒质,声速为常数。而实际上,水声环境较为复杂,声速沿垂直方向存在梯度变化,因此按式(1)计算得到的定位结果将存在较大的误差,甚至连方程都无法成立。大量实验研究表明,除了超远程声传播问题及锋面附近区域声场分析以外,水下媒质的水平分层模型可视为一种接近于实际的理想模型[5]。本文即基于水平分层理想模型开展算法研究和设计。
与光传播理论类似,声线也会在不同传播媒质的分界面处出现反射和折射现象,且满足式(2)所示的折射定律,通常称为Snell定律:
2.2 二分迭代法
求解非线性方程时,迭代法是一种常用的方法。二分法本质上是一种区间迭代算法,在逐次迭代过程中不断地对隔根区间进行对半压缩,最后以区间中点求出满足精度要求的近似根。
如果前两种情况发生,则意味着找到了一个比原区间长度减半的隔根区间,此时舍弃无根区间;下一次计算时将有根区间一分为二,寻找更小的隔根区间,如此重复迭代,将有根区间缩小到充分小,最终求出满足精度要求的近似值,其原理如图1所示[7]。

图1 二分迭代法原理图
2.3 声线修正算法流程
当水下分层声速和信号接收阵元位置坐标已知时,由射线声学理论可求出由声源发射的声波传播至各接收阵元的时延和时延差,将时延差代入射线方程组求解即可完成定位解算。但由于射线方程较为复杂,很难求出它的解析解[2]。本文提出的声线修正算法的核心思想,就是通过迭代尝试在一定范围内搜索出精确、合理的初始掠射角,以该掠射角对应的唯一声线为基础实现水下目标的定位解算,而不用求解射线方程的解析解。
搜索初始掠射角最直接的方式是,在可能的角度范围内(如090)以一定的步进长度(角度间隔)遍历尝试,直至找到满足要求的那一条声线。但如果步进长度选择太大(如0.1),则可能遗漏合理值,导致遍历整个设定的区间范围也无法找出满足时延差精度要求的初始掠射角。而如果步进长度太小(如0.000 1),则一方面运算工作量过大,无法满足实时要求,另一方面即便以这么小的步进长度进行遍历,也未必能找到合理的初始掠射角,导致搜索失败。
本文提出的二分迭代法与步进遍历尝试法不同,也在设定范围内进行初始掠射角的搜索,只是每次迭代计算均能将搜索范围降低一半,从而通过次数不多的迭代尝试,就能搜索出满足时延差精度要求的初始掠射角。利用该算法,假设初始掠射角的搜索范围是0°~90°,则只要通过20次运算,就能达到90°/220≈0.000 086°的掠射角搜索步进长度要求;而顺序遍历法要达到同样的要求可能需要90°/0.000 086°≈220=1 048 576次的计算,即便合理值不在遍历范围的末端,一般也需要数万次至数十万次的计算,可见顺序遍历法效率低下,同样难以满足实时性要求。
本文提出的二分迭代声线修正算法是基于三阵元(阵元标识分别为A、B和C)的同步式水声定位系统,算法流程见图2,其详细步骤和说明如下:

(2) 设定初始掠射角可能的初始区间范围(),针对某湖声速负梯度变化的情况,可固定为0°~90°,确保包含合理值;



(6) 按平均声速法求出声波在各分层媒质中的传播时延,然后各分层传播时延累加得到声波由目标声源到水下基阵接收阵元的总传播时延,如式(5)所示:



图2 实时声线修正算法流程



3 试验验证
本文所述算法的典型验证方法是在夏季声线弯曲较为严重的水文条件下,将水下信号接收基阵和目标声源置于水深跨度较大的不同等温层进行实际试验,目标位于或接近水面,对比声线修正前后的定位精度。
该算法在某座底短基线同步式水声跟踪定位系统中实现并经过了实际湖上跑船验证。该系统跟踪定位基阵布放于某湖湖底约120 m深度处,基阵对水面船只装载的水下目标模拟声源进行跟踪定位。验证试验前,将目标模拟声源发射换能器和作为定位基准的差分全球定位系统(Differential Global Positioning System, DGPS)设备的天线安装于试验船的同一垂线上,保证了被测目标与基准定位设备实际水平位置的重合。验证目标是通过应用本文所述的二分迭代法进行声线修正后,系统通过水声测量得到的跟踪定位轨迹与作为定位基准的DGPS设备定位轨迹重合度明显得以改善,并对比分析定位结果数据,证明系统定位精度得到提高,从而验证算法的有效性。
算法的验证试验时间为2015年8月,地点为某湖,当时的声线参数是经测量得到的从水面到水下150 m处的分层声速(分层间隔为5 m),如表1所示。
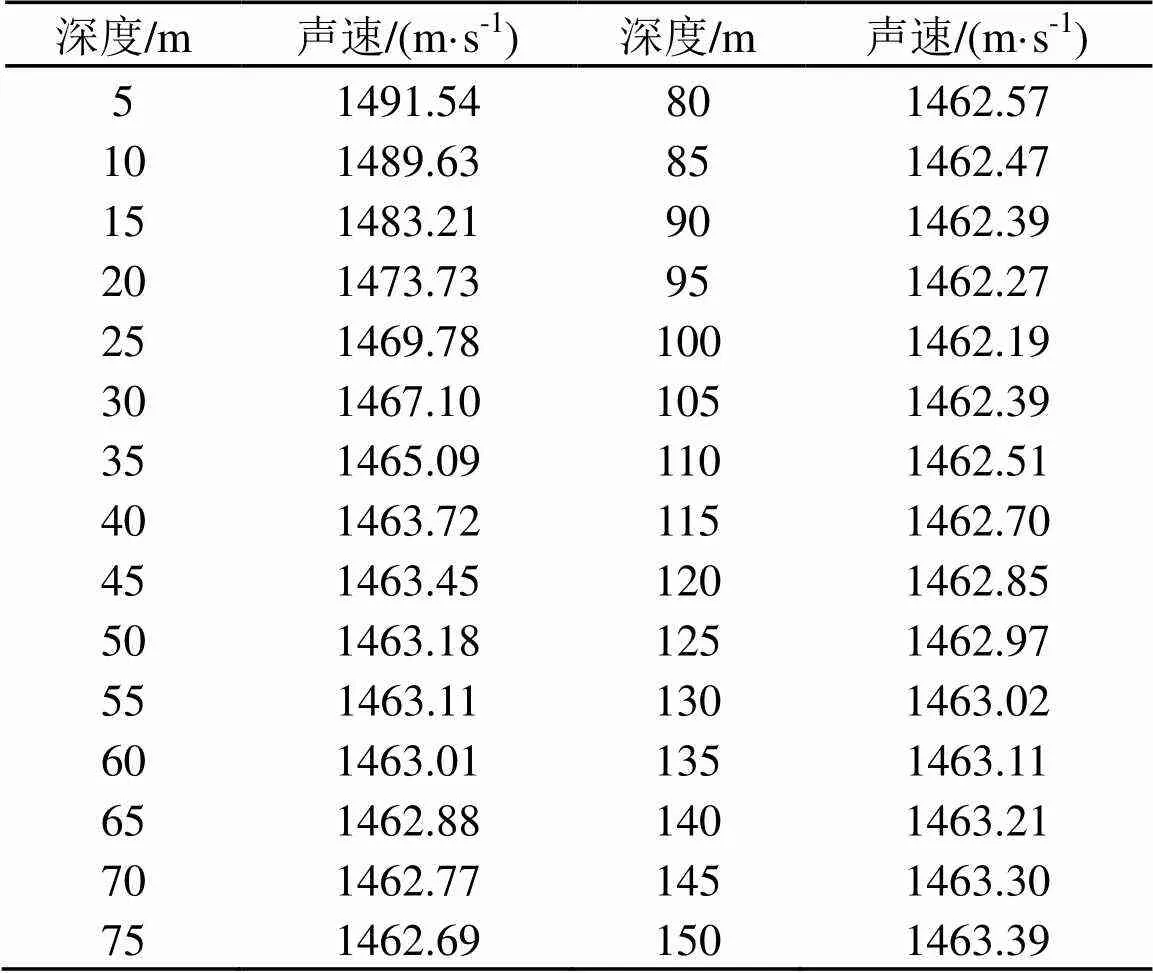
表1 某湖分层声速数据
表1对应的声速垂直面分布曲线如图3所示。根据上述声线参数,利用Matlab软件以声源出射声线的初始掠射角范围145°间隔1仿真绘制出的声线弯曲情况如图4所示。由图4看出,某湖8月份声线弯曲严重,在远距离上尤为明显,该情况满足算法验证的典型水文条件[6]。

图3 某湖8月份声速垂直分布
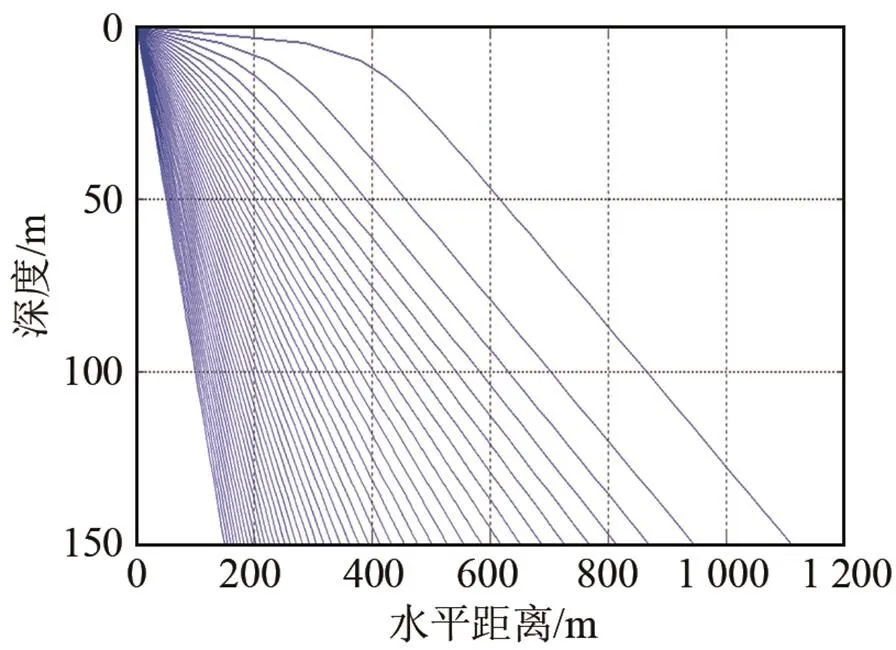
图4 某湖8月份声线弯曲情况
湖上试验中,跟踪定位显控软件声线修正前采用传统的全区域平均声速法按声线直线传播方式进行直接跟踪定位解算,平均声速取值为1 468.0 m·s-1;本文提出的二分迭代法声线修正时采用的声线参数如前所述;某座底短基线同步式水声跟踪定位系统水下基阵三阵元坐标分别为A(0, 0, 120)、B(11, 0, 120)和C(5.5, 9.526, 120),阵元位置坐标单位为m,系统采用直角坐标系,以阵元A为定位坐标原点。
湖上试验船航行跟踪轨迹图如图5和图6所示,其中图5为声线修正前的跟踪轨迹,图6为声线修正后的跟踪轨迹。图中两个圆圈为系统的作用范围标识,单位:m。对比图5和图6,可以明显看出:声线修正前,距水下基阵阵心距离近时,水面船载声源的水声跟踪定位轨迹与作为基准的DGPS设备定位轨迹重合度良好,但随着声源与阵心之间距离的增加,定位误差也逐渐增大,表现为水面船载声源的水声跟踪定位轨迹与作为基准的DGPS设备定位轨迹重合度逐渐变差。而通过本文所述的方法进行声线修正后,无论距离阵心远或近,水面船载声源的水声跟踪定位轨迹与DGPS设备定位轨迹基本重合。试验中,系统中的水声跟踪定位数据率为每秒10点,算法能够实时完成修正处理并实现绘制修正后的轨迹。
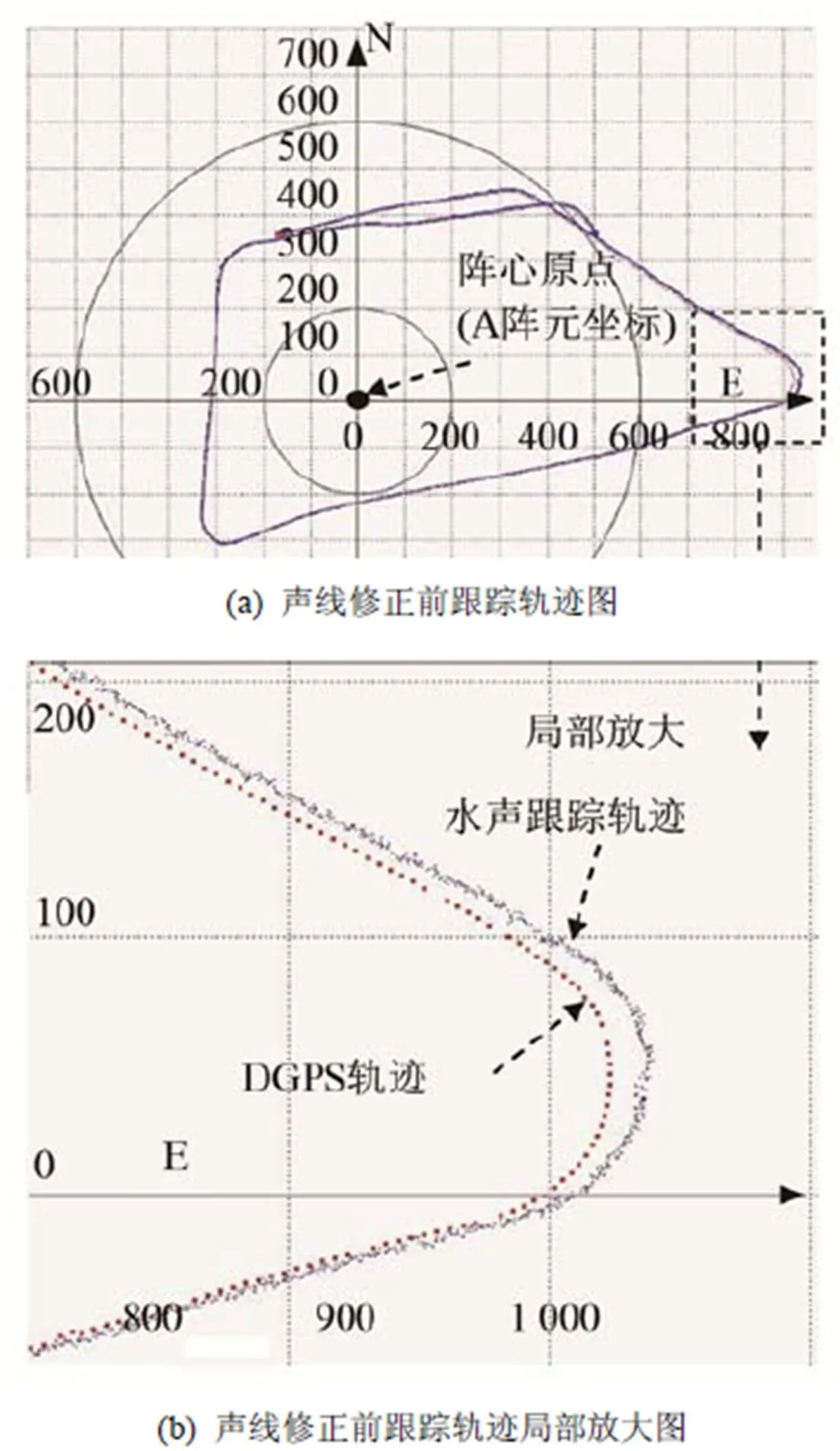
图5 声线修正前跟踪轨迹及局部放大图

图6 声线修正后跟踪轨迹及局部放大图
本次湖上试验中几组典型的定位结果数据如表2所示,表2中定位坐标仅列出本文关注的值和值,定位偏差为水声定位值与DGPS设备定位值的水平距离差。由表2可以看出,试验中在被测声源距阵心最远点925 m处,水声定位点与DGPS定位点的偏差约15 m;通过本文所述的方法进行声线修正后,水声定位点与DGPS设备定位点的偏差均在1.5 m以内。
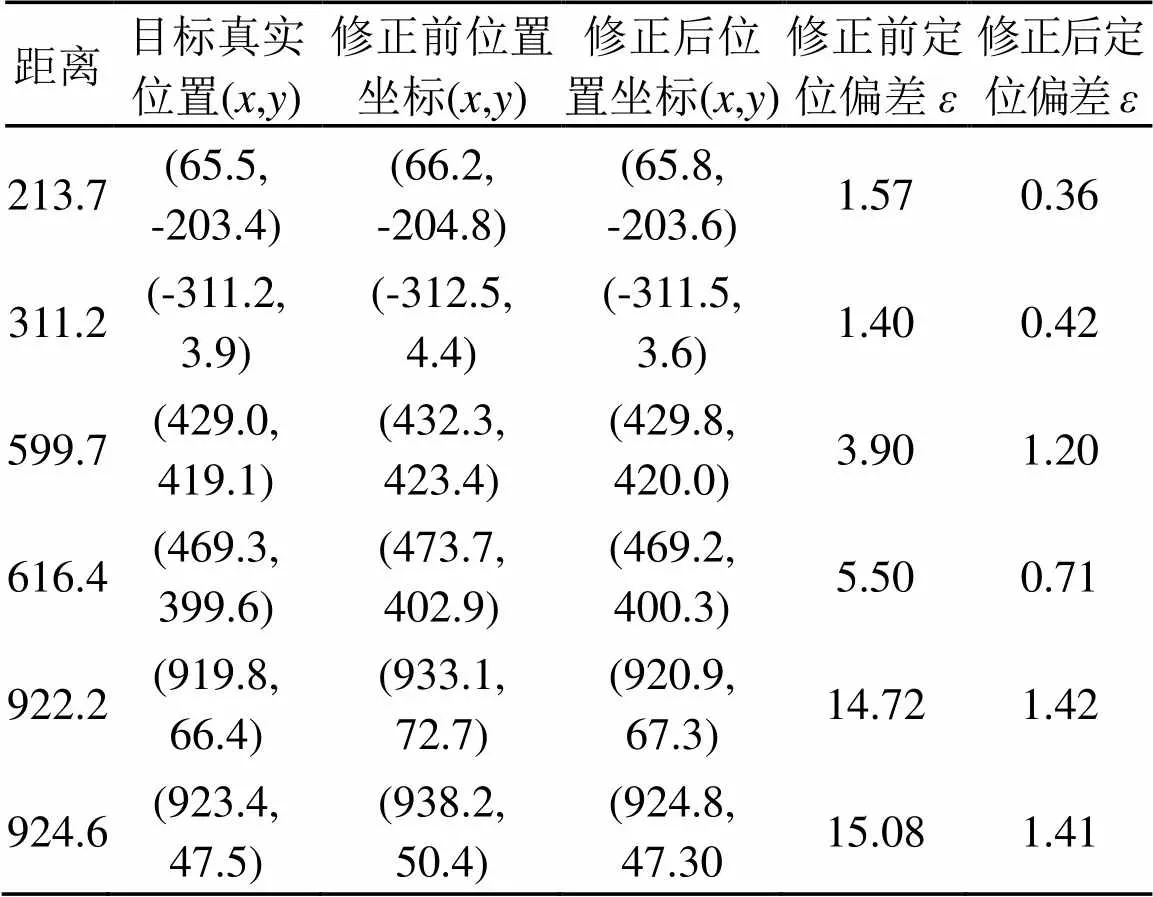
表2 湖上试验结果数据(m)
通过上述湖上试验结果可以看出,算法的应用明显提高了系统的定位精度;同时,即使对于每秒10点的跟踪定位测量数据率,算法也能实时完成修正处理。
但是,应用该算法进行声线修正,试验前须测量获取当前的声线参数,这就增加了试验操作的复杂性。实际应用中可选取典型数据(如每个月选取一组实际测量数据)作为近似代替并建立数据库。跟踪定位前软件自动选取数据库中当前时段的数据进行修正处理,即可满足使用需求。

4 结论
本论文提出并实现的二分迭代实时声线修正算法,在某湖经过了典型的跟踪定位试验验证,试验结果表明:该算法简单易行、运算速度快,能够满足同步式水声定位系统的实时修正处理要求,在复杂水文条件下有效提高了系统的定位精度。该算法虽然仅针对三阵元同步式水声定位系统提出,但其核心部分为单路水声同步测距修正,因此具有良好的工程实用性和通用性,可推广应用于湖上同类水声跟踪定位系统。
[1] 梁民赞, 余毅, 王黎明, 等. 一种声线修正的查表法[J]. 声学技术, 2009, 28(4): 556-559.
LIANG Minzan, YU Yi, WANG Liming, et al. A table look-up method of sound ray correction[J]. Technical Acoustics, 2009, 28(4): 556-559.
[2] 李迎春, 吴德明. 短基线平面阵型双曲面定位系统的声线修正[J]. 声学学报, 1992, 17(5): 340-344.
LI Yingchun, WU Deming. Correction of located points in a hyperbolical locating system with a small plane array[J]. Acta Acustica, 1992, 17(5): 340-344.
[3] 王燕, 梁国龙. 一种适用于长基线水声定位系统的声线修正方法[J]. 哈尔滨工程大学学报, 2002, 23(5): 32-34.
WANG Yan, LIANG Guolong. Correction of sound velocity in long baseline acoustic positioning system[J]. Journal of Harbin Engineering University, 2002, 23(5): 32-34.
[4] 石章松, 刘忠, 王航宇, 等. 目标跟踪与数据融合理论及方法[M]. 北京: 国防工业出版社, 2010: 42-43.
SHI Zhangsong, LIU Zhong, WANG Hangyu, et al. Method and theory of target tracking and data fusion[M]. Beijing: Nation Defense Industry Press, 2010: 42-43.
[5] 刘孟庵, 连立民. 水声工程[M]. 杭州: 浙江科学技术出版社, 2002: 40.
LIU Meng’an, LIAN Limin. Underwater acoustic engineering[M]. Hangzhou: Zhejiang Science and Technology Press, 2002: 40.
[6] 龚浩亮. 船载式水声测量系统跟踪显控平台的设计[D]. 成都: 电子科技大学, 2015.
GONG Haoliang. Design of the tracking display and control platform of a shipborne underwater acoustic Measurement System[D]. Chengdu: University of Electronic Science and Technology of China, 2015.
[7] 黄廷祝, 傅英定. 高等工程数学[M]. 成都: 电子科技大学出版社, 2008: 64-65.
HUANG Tingzhu, FU Yingding. Advanced engineering mathematics[M]. Chengdu: University of Electronic Science and Technology of China Press, 2008: 64-65.
A dichotomy iteration method of real-time sound ray correction
GONG Hao-liang, CHEN Bo, WAN Li-li, JIANG Nan
(Kunming Shipborne Equpment Research & Test Center, Kunming 650051, Yunnan, China)
In order to improve the accuracy of underwater acoustic positioning,this paper proposes a real-time algorithm based on dichotomy iterative method for the sound ray correction. First, the initial grazing angle of transmission sound ray is searched out quickly by using the dichotomy iterative method, along the ray, the localization acoustic signal emitted by underwater sound source spreads. And then, the distance between underwater receiving array element and sound source can be calculated through the unique sound ray associated with this angle, this calculation process is based on Snell theorem. Finally, the positioning calculation can be completed for the underwater target by using the intersection solution of three-channel ranging values consistent with the sound ray. The testing results at the lake demonstrate that this algorithm has advantages in simple implementation and high operation speed; it is able to realize the real-time correction and improve the position accuracy of the underwater acoustic positioning system effectively under complex hydrographic conditions. This algorithm has good practicality and generality in engineering; it can also be applied to the similar underwater acoustic positioning and tracking system.
dichotomy iterative method;real-time sound ray correction; Snell theorem; initial grazing angle
TB56
A
1000-3630(2018)-02-0303-06
10.16300/j.cnki.1000-3630.2018.04.002
2017-06-15;
2017-10-16
龚浩亮(1982-), 男, 云南昆明人, 硕士, 高级工程师, 研究方向为水下武器弹道跟踪与测量技术。
龚浩亮, E-mail:58046938@qq.com
