基于点云的植株表型构建和反射率方向性分析
2018-08-28方圣辉
方圣辉,汪 琳,周 颖,杨 光,王 东
(武汉大学遥感信息工程学院,湖北 武汉 430079)
1 引 言
植被冠层的辐射散射特性研究是植被定量遥感的基础[1]。通过对地表目标多个方向观察,研究电磁波与植被的相互作用过程,获取其双向反射率分布函数(Bi-directional reflectance distribution function,BRDF)[2],构建不同波段的辐射散射模型,可以推导地表参数[3]。SAIL模型是目前应用最广泛、理论最完善的多角度辐射传输模型[4-5],国内外众多学者已经利用它反演地表生物参量并取得了一定的成果[6-8]。结构参数,包括叶倾角分布函数(Probability Density Function,PDF)和叶面积指数(Leaf Area Index,LAI),作为SAIL模型中敏感性较高的输入参数[9-11],其准确性直接决定了模型的反演精度[12]。然而由于叶倾角参数复杂并且难以准确获取的特性,在实际应用中往往直接选取先验参数[13],增加了结果的不确定性。激光雷达(Light Detection and Ranging,LiDAR)由于具有快速、无损地测量植被的表型特征的优势,被广泛用于树木、农作物和森林的结构参数获取上[14]。已有研究证明,三维数字植物与真实植物的物理尺寸、形状和外观都有着极高的一致性[15-16]。
本文通过三维激光扫描获取了高精度的典型植株点云,并建立冠层三维模型,针对SAIL模型中结构参数的设定可能存在的不确定性提出改进,使用三维模型计算得到的准确的叶倾角分布,替换平均叶倾角代入椭球分布函数中模拟的叶倾角分布,避开中间计算过程产生的误差。为了验证改进方法的适用性,本文分析了改进前后的多角度光谱反射率的变化情况,并与实测光谱进行了对比。
2 数据和方法
2.1 实验设计
考虑形态特征各不相同、数据易获取等条件,选取了有代表性的四种植物,分别为白掌(均匀型)、龙须兰(喜斜型)、绿萝(球面型)、鸟巢蕨(喜斜型)。在湖北武汉华中农业大学试验田(背景为裸土)分别测量了四盆实验对象的激光点云和光谱数据,测量仪器为Mantis-Vision F5手持式三维激光扫描仪和ASD FieldSpec4便携式地物光谱仪。扫描仪在0.5 m距离处的扫描精度可达0.05 mm、扫描分辨率为0.5 mm;光谱仪测量从350 nm~2500 nm范围间隔为1 nm的反射率数据。利用BRDF观测架测得观测天顶角-90°~90°范围间隔为15°,相对方位角0°~180°范围间隔为30°,共计78组数据。
实验总体流程图如图1所示。

图1 流程图Fig.1 The Flow Chart
2.2 三维模型的建立
建立冠层的三维模型,主要分为以下几个步骤:①在Geomagic studio软件中通过检测体外孤点、减少噪声点、滤波等处理,优化原始的扫描数据;②通过随机点采样的方法降低数据集的密度,减少时间冗余、增加计算效率;③利用空间不规则三角网逼近三维实体表面的数据模型。
建立的三维模型采用STL文件格式存储,其数据通过给出组成三角面片法向量的三个分量(用于确定三角面片的正反方向)及三角面片的三个顶点坐标来实现,一个完整的STL文件记载了组成实体模型的所有三角面片的法向量数据和顶点坐标数据信息。通过对每个三角面片的格式解析,我们可以准确解算出每个三维模型的叶倾角分布和叶面积指数。建模时三角网的大小在一定程度上会影响到计算的叶倾角分布结果。我们默认为越三角网越小,对于植株的拟合程度越高,但是过于密集的三角网影响存储效率和计算速度,本文实验将叶片宽度的十分之一作为最低三角网边长的标准,对叶倾角计算的结果影响在容许范围之内。
2.3 结构参数的解算
2.3.1 叶面积指数的计算
统计所有叶子的叶面积之和,除以植物的占地面积即是叶面积指数,算法示意图如图2所示。

图2 LAI求解算法示意图Fig.2 Algorithm diagram of LAI
①求出点云在O-XY平面的范围,在该范围内按照一定间隔step(本文取点云分辨率的0.5倍)建立网格,初始化所有网格点的值为0;②读取第一个三角面片,其三个顶点分别为AiBiCi,计算其面积Si。计算AkBkCk及其投影到O-XY平面的范围(nmax,mmax)~(nmax,mmax),在该范围内,计算格网点pi,j是否在三角面片ABC内,若在三角面片内则格网点的值为1;③依次取下一个三角面片计算其面积并累加至Stotal,按照步骤②计算其对应范围内的格网点的值,直至所有三角面片计算完;④在点云范围内计算格网中每一个单元格四角的格网点的值之和m,统计所有m≥3的单元格数量num;⑤经过①~④以后,按照下式计算LAI:
2.3.2 叶倾角分布的计算
叶倾角指叶面法线与垂直方向的夹角,它的值越大叶片越直立。叶倾角不能以叶子为单位取所有叶倾角的平均值,因为单个叶子面积不同,单个叶面微元由于其倾角不同对冠层光谱的贡献也不同。叶倾角分布可客观反映冠层叶片倾角,是叶倾角的概率密度函数。
1)基于平均叶倾角的叶倾角分布计算
由于叶倾角分布难以准确获得,SAIL模型在计算过程中使用了Campbell的椭球分布函数[13],它可看作是Goel提出的六种分布的一般形式,可通过平均叶倾角近似计算水平匀质冠层的叶倾角分布。椭球分布函数是一项具有特殊性质的复杂函数,其定义公式如下:

其中,α是平均叶倾角,该参数常以经验值代入,g(α)为叶倾角的概率密度,A是一个与χ有关的参数:
A=
χ为椭球分布参数,是椭球水平半轴和垂直半轴的比值,是一个不确定的参数。通常代入经验公式中解算,公式如下:
α=9.65(3+χ)-1.65
可见,椭球分布函数模拟的叶倾角分布结果仅与平均叶倾角的取值相关。
2)基于点云数据的叶倾角分布计算
在三维模型中,由于叶片由一系列三角面片表示,考虑到叶面的非平面特性,三角面片越大,则其拟合叶面越不准确,所以应该计算每个三角面片的法线与垂直方向的夹角,并以三角面片面积的倒数作为权重,取所有三角面片的倾角进行加权,在相应区间内,累计计算其概率密度,即叶倾角分布函数PDF。
其算法如下:①取第一个叶子三角面片,计算其法向量与竖直方向的夹角,计算其叶面积的倒数与其夹角的乘积;②根据夹角的大小,将①中计算得到的乘积值累加到相应区间;③计算下一个三角面片,直至将所有的三角面片计算完毕。
3 结果与分析
3.1 三维建模及结构参数计算结果
如图3所示,(a)为采集数据时,实验对象的照片;(b)为采集得到的原始点云数据,可见点云中所含信息丰富,可以完整地展现实验对象的结构信息;(c)为在点云的基础上,经过数据预处理、封装计算等步骤得到的三维建模,每个模型由无数个三角面片,依据一定的拓扑关系拼接而成的一个整体;(d)为三维模型准确计算得到的PDF以及传统Campbell函数估计的PDF的对比结果。通过模型计算的LAI从Plant #1到Plant #4分别为2.62、1.68、2.21和1.97。
3.2 模拟光谱与实测光谱对比
本文以高光谱遥感中常用的光谱角(spectral angle,SA)[17],即原点和高维空间点构成两高维向量的夹角作为测度指标,用于整体评价SAIL模型计算结果和实测光谱的相似性。具体计算中只要计算两条光谱角的余弦即可:
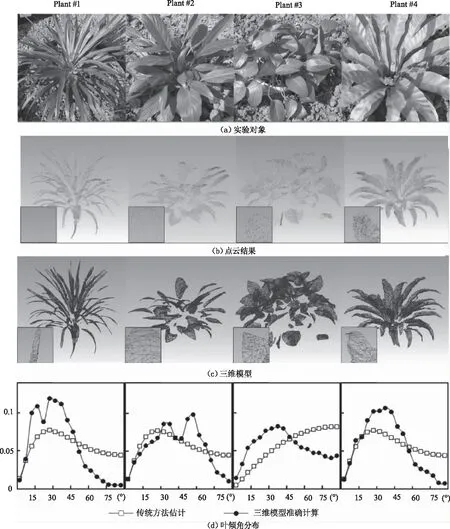
图3 建模结果与数据对照Fig.3 Modeling results and data comparison

为了突出反映结构参数对光谱的影响,本文选取了植被的典型光谱特征波段进行重点分析,分别为450 nm(蓝波段)和670 nm(红波段)的两个叶绿素吸收谷,以及860 nm(近红外波段)的反射峰。SAIL模型其他参数依据实测数据或经验值设置如下:叶片反射率和叶片透射率由光谱仪实际测得,土壤比例系数为0.15,热点参数为0.1,漫反射系数为0.02。最终这三个特征波段的传统方法模拟、改进方法模拟和实测光谱反射率结果对比分别见图4、图5和图6。图中每行分别代表每个实验对象,每列代表从相对方位角AZ从0°~180°间隔30°的结果,其中0°为主平面方向,90°为垂直主平面方向;观测天顶角OZA从-90°~90°间隔15°取值,对应于每个结果表内部的横坐标,其中0°代表垂直下视观测。
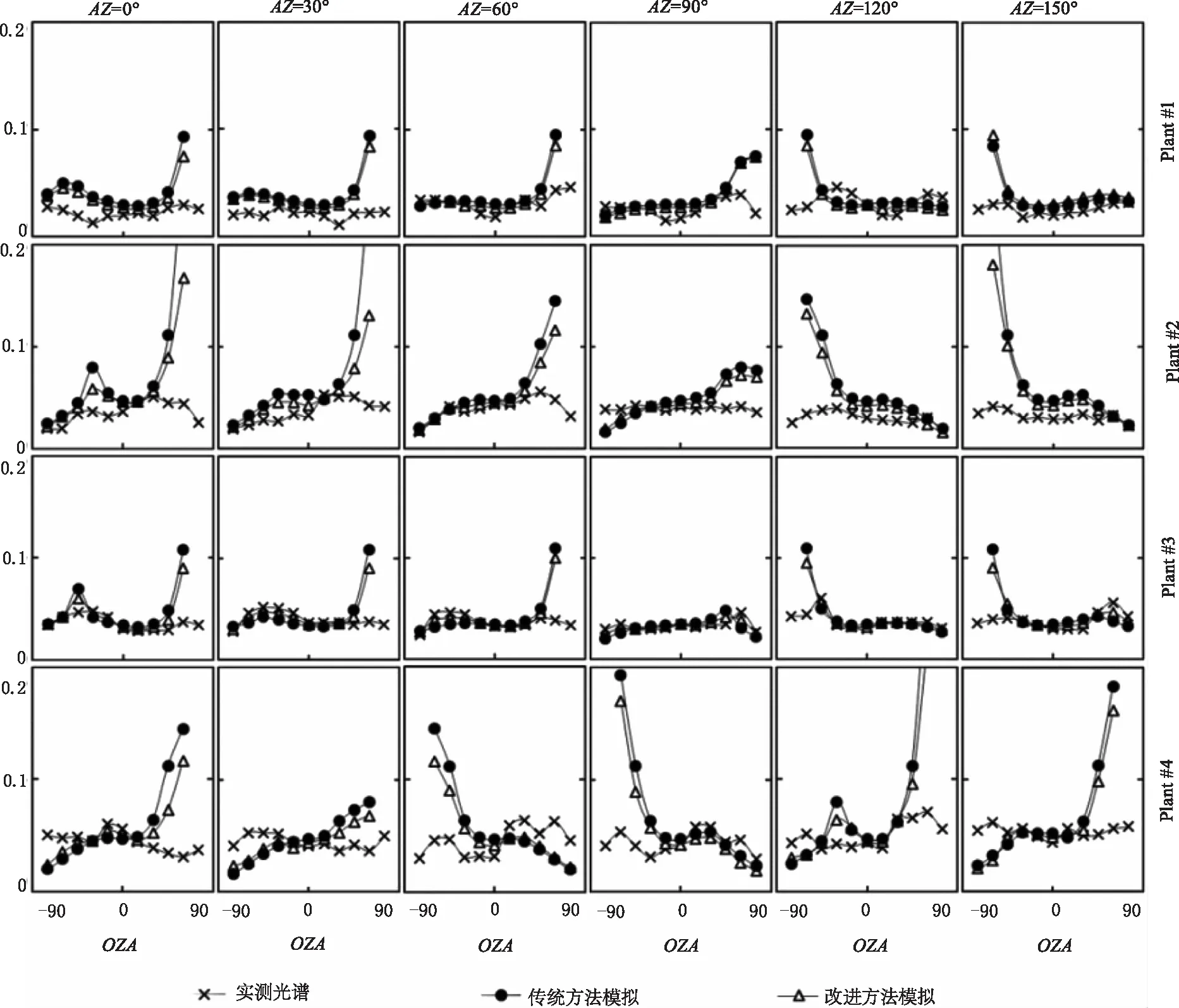
图4 蓝波段(450 nm)多角度反射率Fig.4 Multi angle reflectivity of the blue band
由图4、图5可见,主方向(AZ=0°)上各向异性最强,即前向反射率高于后向反射,垂直于主方向(AZ=90°)各项异性最弱,其他方向介于两者之间。在垂直下视方向(OZA=0°)时,模拟的反射率与实测最接近,偏离垂直视角越多,模拟结果误差越大。模拟的BRDF结果更接近理想的二向反射性质,但是实际测量的数据结果由于实验的环境(如周围土壤反射或吸收、辐射场整体环境等因素)影响,表现出的二向反射性质较弱,而在SAIL模型中环境因子作为一个不敏感的参数,在使用时常常被忽视或者使用同一的常数替代。通常情况下,如果是用作大尺度遥感影像反演,其他不确定性因素占主导的情况下,这种环境因子导致的误差可以被忽略,即使用固定常数作为模型替代,然而,在地面实验,如在试验田进行田间光谱测量即利用地面所获取的数据进行研究时,周围辐射源的相互作用效应被放大到不可忽视,使用SAIL模型过于理想化导致了模拟结果与实测差异较大。说明对于单株植株而言,观测方向和光源方向才是影响BRDF分布的主要因素。对比传统模拟结果与改进后的结果发现,规律与BRDF分布的特性一致,结构参数在主方向上的改进程度均大于其他方向,应使用主方向的多角度观测反演结构参数。
图5 红波段(670nm)多角度反射率Fig.5 Multi angle reflectivity of the red band
图6所示的860 nm的近红外波段,模拟与实测光谱的BRDF特性均不突出,建模计算的结果也并无明显提高,这是由于植被在该波段具有高透射和多次散射的特性,造成了结构参数在该波段的不敏感。
4 结论与展望
本文利用点云数据改变了传统的SAIL模型的输入参数,使结构参数由传统的人工干预选择并代入经验函数中计算,变为由点云数据直接求得。以典型植物盆栽为研究对象,利用激光点云准确恢复植物表面型态,建立三维模型准确叶倾角分布和叶面积指数,并分析了反射率多角度的变化情况,得到以下结论:①三维模型计算结构参数相对于传统椭球估计方法在SAIL模型反演时得到的结果更为准确;②结构参数对于光谱的影响在主方向上最为显著,垂直于主平面最弱,其他平面介于前两者之间;③植被叶绿素吸收波段,如蓝450 nm、红670 nm,具有较强的光谱异性,结构参数的影响尤为突出,而近红外860 nm由于高透射和多次散射特性,削弱了光谱的各向异性,其影响并不突出。
利用激光点云准确建立三维模型可以有助于解决定量遥感中的参数获取的难题,但仍存在以下不足:①本文假设模型三角面片的大小相对于叶片而言足够小,建模方法造成的误差可忽略不计,如果点云的精度较低,计算结果的可信度将大大降低;②近景激光扫描精度高,计算结果准确,但单株植物的实验结果不具普遍意义,如何推广到机载或地空平台应用,是接下来的研究重点。
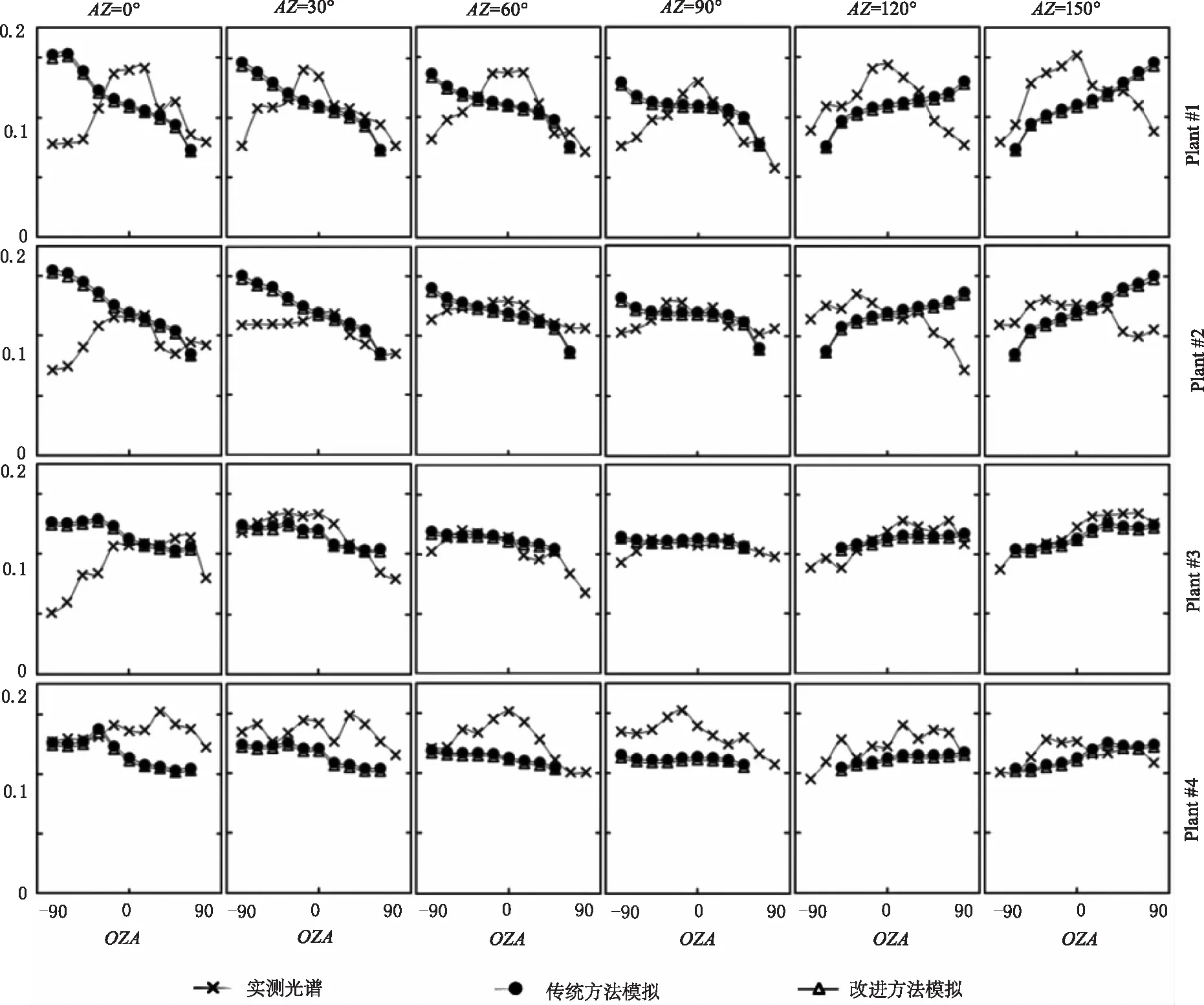
图6 近红外波段(860 nm)多角度反射率Fig.6 Multi angle reflectivity of thenear infrared band
