导弹助推段天基预警探测综述
2018-08-28黄树彩吴建峰
黄 达,黄树彩,吴建峰
(空军工程大学防空反导学院,陕西 西安 710051)
1 引 言
天基预警探测在国防防御中有着重要作用,现以美国的“天基红外系统”为研究对象,对天基探测的发展及工作方式进行研究。
“天基红外系统”是一种新型的导弹预警系统,具备全球性、实时性、稳固性的监测能力[1-3]。可用于导弹发射预警、导弹全程跟踪、地面火力信息支援、技术情报和战场监视,该卫星可在全球范围内对导弹的发射时间、地点、弹道进行监视和预警[4-5]。天基红外探测相比地面雷达探测来说可避免地理等因素的限制,且可使拦截弹具有更高的目标截获能力。
天基探测有着由最初的单波段红外探测向多波段的光谱探测发展趋势[6-7]。对于助推段导弹来说,其尾焰在天基红外成像中以弱小目标形式表现,缺少目标形状、波纹等信息[8]。对于红外图像来说,多以复杂背景为研究前提,弱小目标为检测对象。由于缺乏目标信息,检测算法相对复杂,检测结果准确率不能保证。对于光谱图像来说,除具有红外图像包含的信息外,还具有光谱信息,以导弹尾焰光谱为对象,不仅能够达到目标检测的目的,还能对目标进行简单识别[9]。
2 系统组成及工作方式
“天基红外系统”由地面站、低轨卫星、高轨卫星组成[10-13],如图1所示。高轨卫星(SBIRS-High)包含5颗地球静止轨道卫星(4颗运行1颗备份)和2颗大椭圆轨道卫星,其中大椭圆轨道卫星的检测区域以包含俄罗斯地域的高纬度地区为主,高轨卫星的检测覆盖全球,主要对助推段的导弹进行侦察、跟踪;低轨道卫星被命名为“空间跟踪与监视系统(STSS)”,由20颗小卫星组成,可协同对全球范围内的导弹发射全过程进行跟踪、识别,且跟踪、识别的精度能够保证。地面站对高、低轨卫星所提供的数据再加工,旨在增加所获信息的准确性进而做出战略、战术决策。
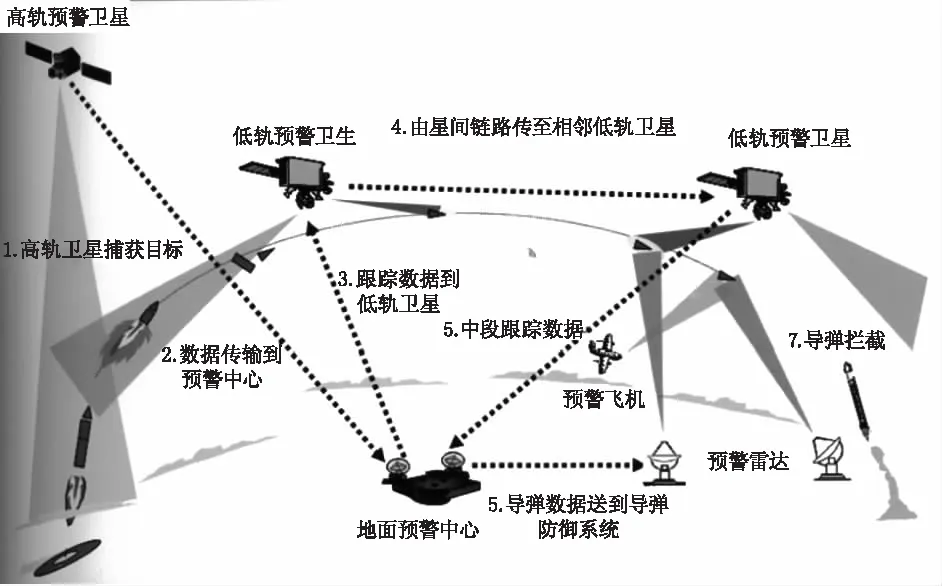
图1 “天基红外系统”示意图Fig.1 The schematic diagram of “space-based infrared system”
“SBIRS-High”卫星由高速扫描型和凝视型探测器组成。高速扫描探测器南北方向扫描,目标为导弹尾焰,发现目标后迅速将信息传送至凝视型探测器进而将导弹的发射画面拉近放大,获取更详细的目标信息。
“STSS”卫星也装有2台红外探测器(宽视场扫描型短波红外捕获探测器和窄视场凝视型多谱段跟踪探测器)。其具备“SBIRS-High”所有功能,且还可跟踪中段和再入段的目标,也就是说,“STSS”可对导弹的全过程进行跟踪、识别。
“STSS”卫星成对工作,一颗视角是地球背景,另一颗视角是空间背景,旨在对目标进行立体探测、跟踪。相比“DSP”卫星来说,“STSS”不仅有能够进行红外探测,还具有可见光、紫外和高光谱成像等探测功能,这对天基探测的准确性有很大的帮助。本文将从天基探测角度出发,分别对光谱检测识别和红外检测识别方法进行分析讨论。
3 目标分析
弹道导弹在助推段伴有高温、大面积、强辐射的尾焰,天基探测器在助推段也是以导弹尾焰为主要探测对象,基于此,对导弹尾焰的红外特性和光谱特性进行分析。
3.1 导弹尾焰的红外特性
导弹尾焰相对周围事物有大面积的强辐射,但由于其与天基探测器距离远,在天基探测成像时只能以点目标呈现,且灰度值(辐射值)小。所以天基红外导弹尾焰探测是典型的弱小目标红外探测[14-15],图2为添加点目标的图像特性。
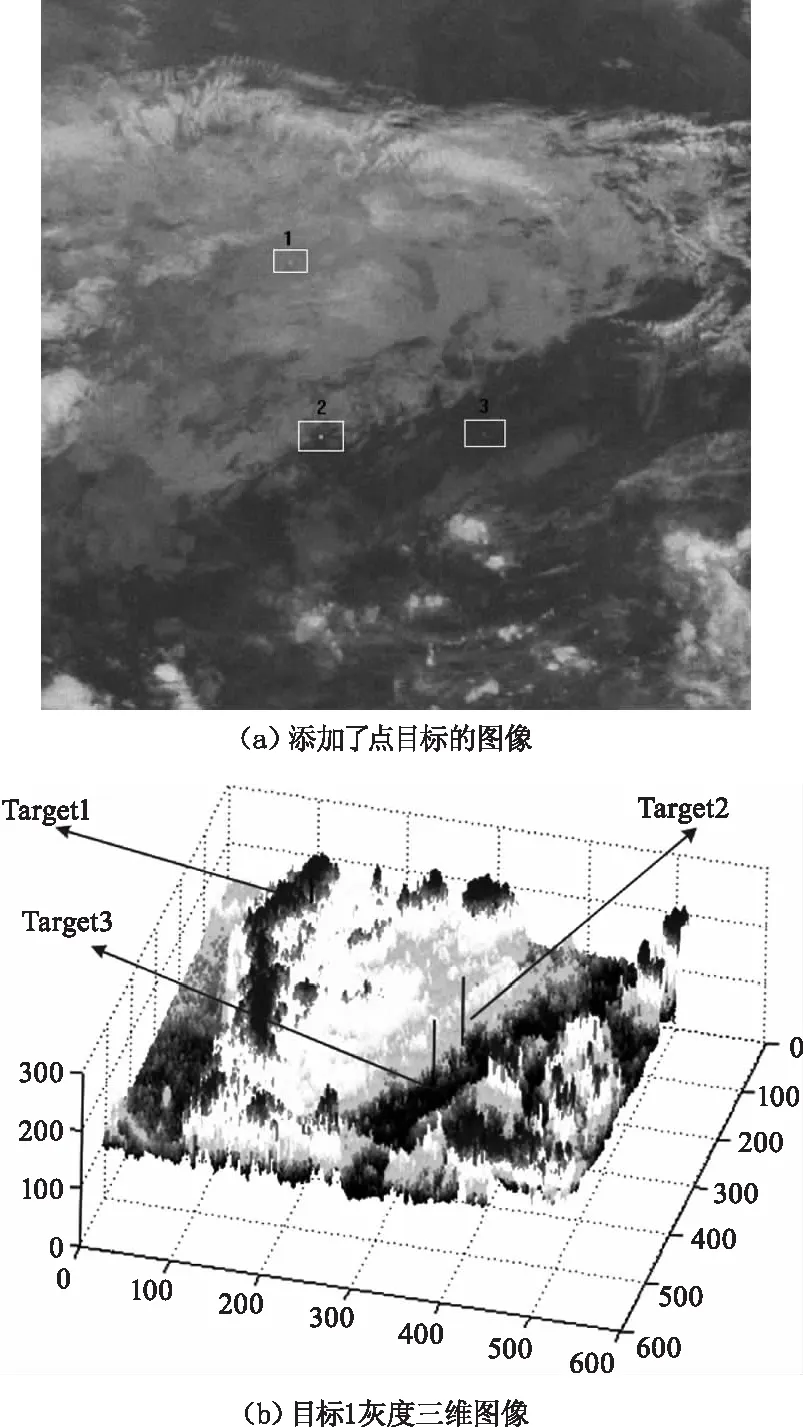
图2 添加了点目标的图像特性Fig.2 Image features added to the point target
图2(a)是人为加了目标的天基红外图像,该图像背景为云层、大气。图像中包含3个目标,目标1在云层区域,目标2在云层与大气的过渡区,目标3在大气区域。观察图2(b)可知,由于云层具有较强灰度,导致目标1信号淹没在云层信号中;大气灰度值小导致目标2、3突出。
分析可知,目标在背景空间的不同位置分布具有不同特性,且目标像素少导致无形状、尺寸等特征信息可利用;点目标处在起伏云层背景中时,容易被背景杂波噪声所淹没,导致信噪比(信杂比)比较低,但是仍然表现出与背景不同的灰度和统计特性;在频域,点目标和噪声具有相类似的高频特征,而背景则为图像的低频分量。
3.2 导弹尾焰的光谱特性
导弹尾焰光谱受导弹运动状态(飞行高度、速度、加速度)、导弹发动机型号、燃料成分和大气压强等因素影响,对于一类型导弹来说,不同季节、不同探测角度都对天基卫星所探测到的光谱产生影响,造成一焰多谱的现象[16-18]。一般尾焰包含大量高温的水和二氧化碳分子,这导致尾焰光谱在2.7 μm、4.3 μm附近有相对强辐射,即有波峰。图3是借助光谱数据库(HITEMP)对不同高度处尾焰进行的仿真。
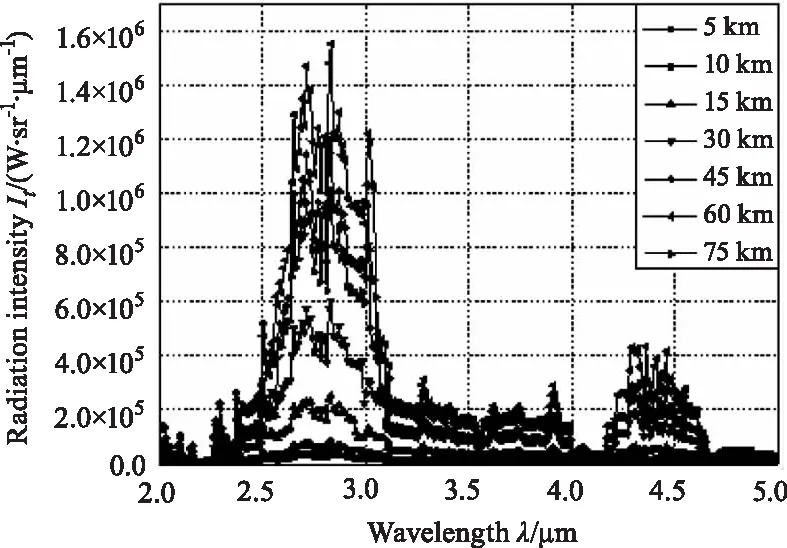
图3 不同高度尾焰光谱仿真图Fig.3 Simulation chart of tail height spectrum of different height
从图3可以看出,光谱曲线随着高度的不同而有所变化,尤其在2.7 μm,4.3 μm特征波段处,辐射变化相对其他波段较明显。
4 天基探测方法
4.1 红外探测方法
红外弱小目标检测多倾向于复杂背景的实时性检测,此处结合导弹尾焰的红外特性,选择3种典型的红外探测方法进行分析。
4.1.1 最大中值滤波
中值滤波是一种较长见的的统计滤波方法[19]。最大中值滤波基于滑动窗口模型,对窗口内的像素值排序,选择序列中间值作为该窗口的输出值。窗口大小的选择至关重要,窗口过大会导致图像中很多细节被抹除,目标被滤除的概率非常大;窗口过小会导致图像滤波效果不明显。因此应根据目标大小及辐射特性选择合适的窗口大小。图4给出了最大中值滤波进行目标检测的流程,其中滤波窗口大小为7×7。可以看出,最大中值滤波对背景边缘的保留较好,背景预测效果较好。
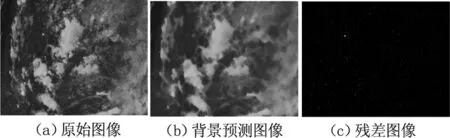
图4 最大中值滤波检测流程Fig.4 Maximum median filter detection process
4.1.2 Top-hat滤波
Top-hat滤波是形态学滤波的一种典型方法[20],其本质是对局部区域进行非线性变化进而达到抑制背景的目的。非线性变化主要由膨胀运算和腐蚀运算完成。
膨胀运算的数学表达式如式(1)所示:
d(i,j)=f⊕b=max{f(i-s,j-t)+
b(s,t)|i-s,j-t∈Df;s,t∈Db}
(1)
式中,f为图像像素值;b为结构元素;(i,j)、(s,t)表示像素坐标。
腐蚀运算的数学表达式如式(2)所示:
e(i,j)=f⊗b=min{f(i+s,j+t)-
b(s,t)|i+s,j+t∈Df;s,t∈Db}
(2)
式中,Df和Db分别为f和b的定义域;i-s,i+s,j-t,j+t必须在f的定义域Df内,s和t必须在b的定义域Db内。
先进行腐蚀然后再膨胀的操作过程称为开运算,即:
f∘b=(f⊗b)⊕b
(3)
先进行膨胀然后再腐蚀的操作过程称为闭运算,即:
f•b=(f⊕b)⊗b
(4)
Top-hat滤波先根据开运算对图像的背景预测,再根据预测结果与与原图像做差达到目标检测目的。图5给出了Top-hat滤波进行目标检测的流程,其中结构元素为5×5的正方形。可以看出,Top-hat滤波消除了许多边缘细节,背景预测效果较差。

图5 Top-hat滤波检测流程Fig.5 Top-hat filter detection process
4.1.3 PM模型背景预测滤波
PM是基于梯度算子的背景预测方法[21],其数学表达式为:
式中,div表示散度算子;
表示梯度算子;c表示扩散系数;‖·‖表示模,其离散化表达式为:

设滤波窗口大小为7×7,λ=1,k=0.3,c=1。可得到图6所示的滤波效果。观察图6可知,PM模型能够避免图中的边缘细节模糊,背景预测效果较理想。
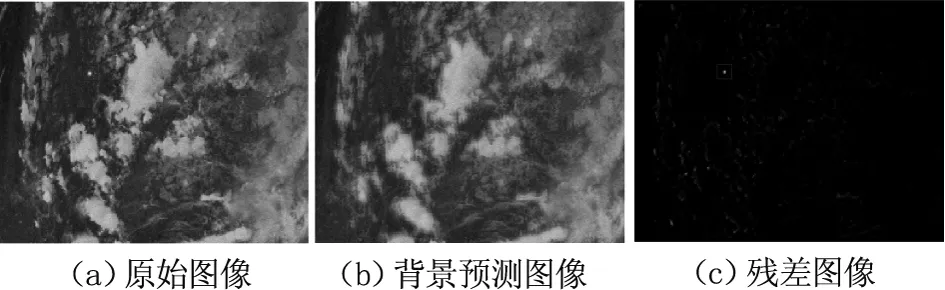
图6 PM模型滤波检测流程Fig.6 PM filter detection process
4.2 光谱探测
4.2.1 光谱信息散度
光谱信息散度是从相对熵的角度考虑的一种描述两光谱间的相似性[22],其数学表达式为:
SID(x,y)=D(x‖y)+D(y‖x)
(8)
式中,x和y表示维度相同的光谱向量,D(·)表示相对熵,又称交叉熵,其数学表达式为:
(9)
式中,d表示光谱向量维数,l表示向量中的位置,p为x概率向量,q为y概率向量,I表示自信息,其数学表达式为:
Il(x)=-logpl
(11)
4.2.2 光谱二值编码
光谱二值编码是基于匹配原理的一种识别方法,首先对原始光谱进行二值化表达[23],表达式如下:

式中,M表示阈值,i表示波段序列,h表示二值化后的光谱,x(i)表示原始光谱。该方法简化了光谱表达使得对于庞大的数据库的匹配仍具有快速性,但该方法使大量的光谱信息丢失,导致识别精度受到约束。
4.2.3 光谱角匹配
光谱角匹配(SAM)直接使用原光谱与数据库中光谱进行匹配[24],其数学表达式为:
cosθ表示两条光谱的相似度。
图7中包含3种型号的导弹尾焰光谱,分别使用SID、二值编码、SAM算法对1型光谱与其他两型光谱进行匹配,匹配结果如表1所示。
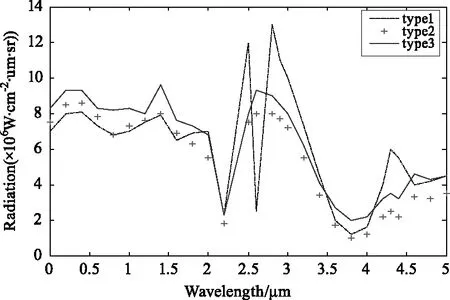
图7 三种型号的尾焰光谱Fig.7 Three types of tail flame spectrum
观察表1可知,3种算法的运算结果相似,1型与2型的光谱相似性略均高于1型与3型的光谱相似性。SAM与SID的运算时间相差不大,相对来说,二值编码算法实时性更强。
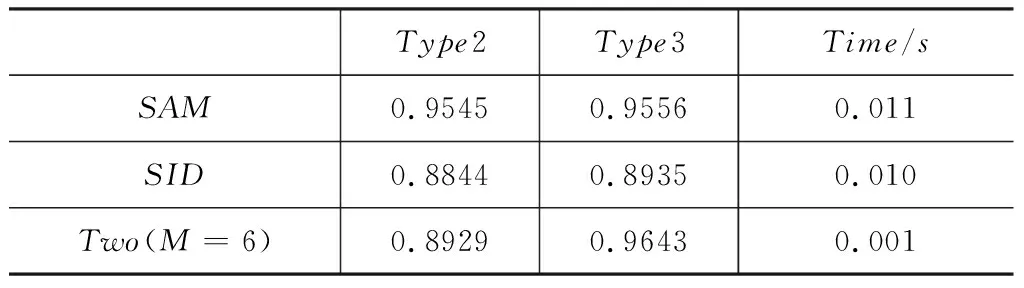
表1 三种算法的相似度运算结果Tab.1 Similarity calculation results of three algorithms
5 探测方法比较
红外探测采用红外宽波段探测器进行探测。最大中值滤波及Top-hat滤波方法均缺乏方向滤波特性,背景边缘得不到有效的抑制,致使图像中残留较多的边缘奇异点,造成较高的虚警率,但最大中值滤波在衰减随机噪声方面具有优势,Top-hat滤波方法简单,实现起来容易。PM模型背景预测滤波虽然待定系数过多,实现较复杂,但其能够有效区分强噪声污染图像的噪声和边缘,且具有方向滤波特性,虚警率低,鲁棒性强。
光谱探测采用光谱探测器进行探测。光谱角匹配和光谱信息散度等方法对光谱精度有一定要求,使检测的实时性难以保证,其中光谱角匹配的匹配结果仅受线型影响,具有较强的鲁棒性,且算法复杂度低,易实现。光谱二值编码方法具有快速性,但其忽视了光谱细节信息,检测(识别)结果可信度相对降。总之,由于红外探测所得到的目标信息量少,检测算法相对复杂且滤波效果有限,而光谱探测增加了光谱信息,使目标的检测效果明显提升,并能够简单识别导弹属性,实时、准确探测是天基预警的研究重点。
6 结 语
天基红外探测系统对国家导弹防御有着至关重要的影响,对其进行深入研究有重要意义。天基红外探测在空间、时间方面都具有优势。传统的探测方法是基于弱小目标理论进行研究的,其探测过程及检测结果会受到目标信息量的缺乏而受到约束,基于此,天基光谱探测的研究得到关注。现有的光谱探测(识别)方法多是基于特定应用背景,因光谱图像数据量过大而不能够被直接应用于实时性系统中。对于天基光谱探测系统来说,保证其实时性和准确性是目前研究的重点。
