基于Matlab软件应用的沥青路面波形重组研究
2018-08-27谭宗海
谭宗海
(广西路建工程集团有限公司,广西 南宁 530001)
0 引言
随着交通量的不断增长,车辆渠化行驶以及超载的加剧,施工、筑路材料等各种因素使得路面的平整度指标逐渐降低。路面平整度与车辆运行环境及公路运输经济密切相关。由于施工、材料等原因,沥青路面表面并不是一个绝对的平面,而是沿着纵向、横向均具有一定的起伏。国内外学者一般研究的路面波形指路面纵坡面表现出来的波形,用以分析多种自由度车辆模型在波形路面上的动力特性。通常情况下,学者们将路面波形假设成正弦波形,利用正弦函数对路面波形进行分析,最终确定相关参数,并分析了不同自由度车辆模型在正弦波形路面上产生的动力响应以及其与对应的路面平整度之间的关系。
在国内,典型的有在我国汽车道路谱统计测量项目中,使用Matlab软件以谐波叠加法对路面不平度进行重构。由于路面不平度对汽车动力各方面的性能影响较大,相关专业学者采用AR模型生成了标准的路面时域模型,对GB7031-87中规定的路面进行了模拟,并对路面进行了分级。有的通过陀螺仪采集自卸车车架的倾斜角信号,运用积分处理这些信号,获得路面的大波形数据,再将其与通过加速传感器获得的小波形数据相结合来分析,将得到的大波形曲线与小波形曲线进行组合,最终得到路面的完整波形。福州大学吴庆雄等学者采用AR模型,研究了路面平整度与路面平整度功率谱间的关系。路面波形对车辆的动力性能有一定的影响,车辆在不同速度、不同波形路面上产生的动荷载不同,重庆交通大学的衣艳丽等人通过研究,利用仿真技术,得出了在一定速度范围内,路面振幅与动荷载的关系。在国外,学者Dwayne Harris通过研究路面波形,分析了路面的表面摩擦性。根据连续式平整度仪在波形路面上的工作原理,结合正弦函数理论,美国MW.Sayers提出用正弦函数表征不平整路面,路面波形被简化为正弦波形,通过正弦函数模拟路面波形,假定路面的波长,来求路面的振幅,将得出的振幅与实测的平整度标准差进行比较,得出了路面波长、振幅与国际平整度指数之间的关系,分析其与不同平整度指标之间的换算关系。
本文基于对湖南省某试验路面平整度的调查及路面平整度标准差的计算,将路面进行分段,选择正弦路面波形,根据实测路面平整度标准差与路面振幅值的比例系数K,确定新的路面波形参数(波长、振幅)。基于Matlab软件的应用实现对沥青路面波形的重组,为指导后续工程提供参考。
1 路面平整度仿真模型的建立
考虑到连续式平整度仪具有较高的工作效率、操作方便且可以自动打印等特点,现一般选用连续式平整度仪来测试已运行路面的平整度。路面平整度仪采用位移传感器来检测路面的平整度,用距离传感器来测试所检测路段的距离。根据连续式平整度仪的构造及测量原理,建立路面平整度仿真模型,如图1所示。图中,H1、H2、H3为3个测量轮底部偏离基准点的高度差,e为测量轮轮距。

图1 连续式平整度仪测量模型示意图
根据连续式平整度仪的测量原理,可以求出测量区间的平整度标准差σi和车辆路段实际路面偏离理想路面的偏差值Di。分析实测数据时,一般取100 m为计算区间,求出各区间段路面偏离理想路面的偏差值Di和平整度标准差σi。
σi=A0Di/n
(1)
其中n表示测量区间内实测数据的个数,A0为路面波形参数。
如图1所示,通过建立的连续式平整度仪测量仿真模型,根据图中表现出的几何关系,可以求出各测量轮底部偏离基准点的高度差,即:
H1=H(x-e)
(2)
H2=H(x+e)
(3)
H3=H(x)
(4)
其中,x为3号测量轮相对于测量起点的位移,e为轮距。
设测量参考基准点的高度为H,根据几何关系,H值为H1和H2的和的一半,则:
H=(H1+H2)/2=[H(x-e)+H(x+e)]/2
(5)
那么,实际路面偏离理想路面的偏差值Δ为:
Δ=H3-H
(6)
由于连续式平整度仪的检测基准长度为3 m,因此其轮距为e=1.5 m,将实测数据代入上述公式,可计算出路面平整度标准差σi。即可得出波长一定的条件下,路面平整度标准差σi和路面振幅之间的关系,同时可得到在路面振幅一定的条件下,路面平整度标准差σi与路面波长之间的关系。
2 沥青路面试验段数据采集及处理
本文以湖南省某试验段为例,利用仪器对其进行平整度检测,并对测量出的平整度数据加以分析,由于测量过程中,人为因素以及环境因素的影响,在对路面波形重组前,需要对测得的数据进行预处理,使数据中的错误值减少或者完全去除,保证路面波形重组的正确性,提高重组的路面波形与实际路面波形的吻合度,平整度数据如表1所示。
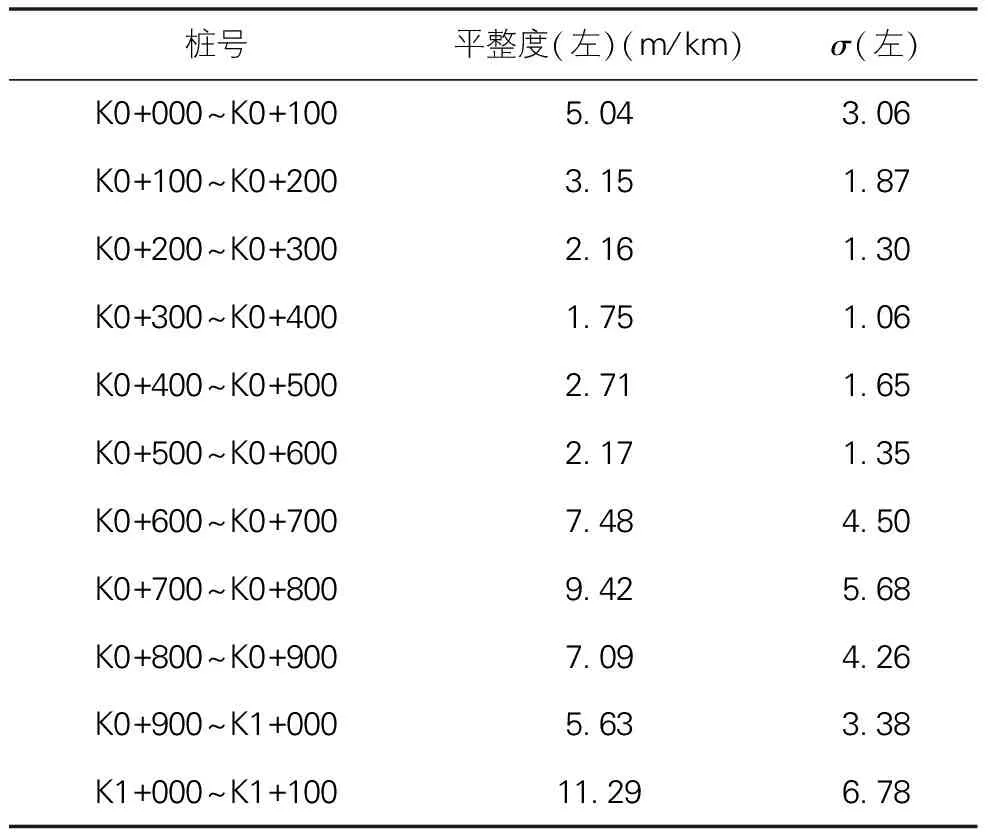
表1 试验段路面平整度数据表
根据测量学中的误差处理方法,本文采用中误差作为衡量路面实测数据精度的指标。根据中误差E的计算方法,将剔除特殊数据外的标准差值作为一个样本。调用Excel表中的Average函数以及Stdevp函数,可计算出样本的平均值σP,得:
σp=1.92
(7)
最后,求得中误差E值为1.07。根据中误差,将实测数据落在(-3E,3E)即(-3.15,3.15)区间外的数据进一步剔除,由于表1中所有数据均满足要求,即可用表1中的数据进行路面波形重组。
由于所测路面试验段数据随机性强,始终采用同一长度的波长和同一大小的振幅来描述路面波形,与实际路面波形不符,精度太低。因此,本文借助一个标准——置信误差,将路面分成多个路段,这些路段的路面波长及路面振幅均不相同,最后重组出的波形由这些路段的路面波形组合而成。置信误差的表达式为:
根据表1中的数据,可计算出样本的标准差s,即:
s=1.07
则可计算出置信误差α值:
α=73%
根据置信误差的计算公式可知,当置信误差值越大时,其数据与期望值的偏离程度越小,本文选择80%作为标准置信误差,用于后面的路面分段。如果选择的区间长度过小,分析起来没有很大的意义。本文将区间最小长度设为200 m。
以桩号K0+100作为第一个区间的起始桩号,计算连续数据组的置信误差。当所求的置信误差大于标准置信误差时,则继续,否则以造成置信误差降低的数据作为下一个分段区间的起始桩号。若求出的置信误差在小于标准置信误差后能立即上升到标准置信误差,则不以降低点作为区间的分界点,反则作为区间的分界点。根据以上原则,以表1中的实测平整度标准差数据进行路面分段,得到14个区间,其中,有的区间长度一样。其处理过程如下页表2所示。
根据表2的区间分布,可确定各区间路面波形参数,采样区间长度为1.5 m,计算出K值,即可求出在不同波长下,各区间路面的振幅A,其值如下页表3所示。
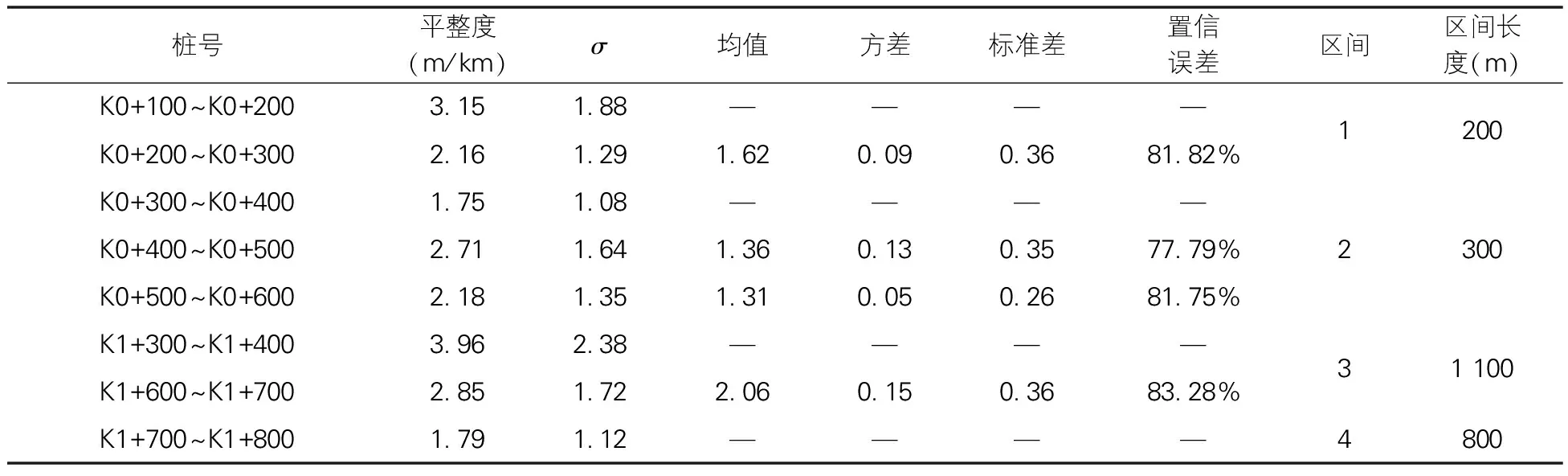
表2 试验段路面平整度数据处理过程表
根据对波形函数的假设,选用正弦函数来表示路面波形,具体表达式为:
(9)
结合表3中各区间路面的波形参数,即可得到整条道路路面的波形函数,并能绘制出各区间的路面波形。
当波长λ为12 m的时候,区间1(桩号K0+100~K0+300)的路面波形函数可表示为:
(10)
采用Matlab可绘出路面波形,如图2所示:
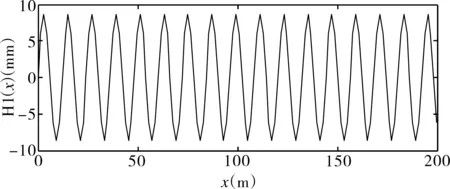
图2 K0+100~K0+300路面波形图(λ=12 m)
当波长λ为20 m的时候,区间1(桩号K0+100~K0+300)的路面波形函数可表示为:
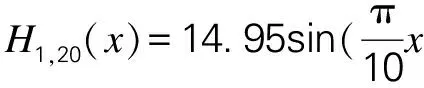
(11)
采用Matlab可绘出路面波形,如图3所示:
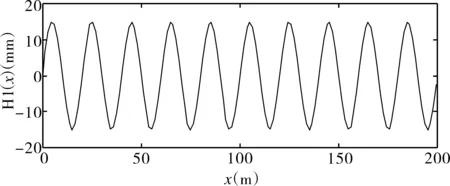
图3 K0+100~K0+300路面波形图(λ=20 m)
当波长λ为30 m的时候,区间1(桩号K0+100~K0+300)的路面波形函数可表示为:
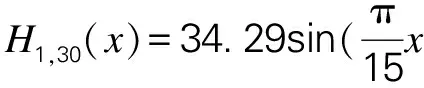
(12)
采用Matlab可绘出路面波形,如图4所示:
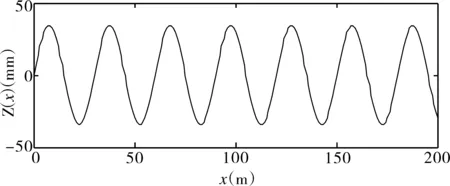
图4 K0+100~K0+300路面波形图(λ=30 m)
根据计算出来的K值,可以根据分段后各段路面平整度标准差均值求出对应的振幅值,并写出各段路面波形的函数表达式,采用Matlab重组出路面波形图,可知在不同波长条件下,同一区间路段的波形图不一样。
3 结语
基于试验路段路面平整度数据及计算出的路面平整度标准差,本文提出将整个道路分成在对应区间段的路面波形分段方法,拟合符合实际路面的路面波形函数,重组实测沥青路面波形,得出以下结论:
(1)根据路面实测数据,提出置信误差这一标准,取置信误差标准值为80%对实际路面进行分段,并根据一定波长条件下,路面平整度标准差与路面波形振幅间的关系,求出不同波长条件下各路段的路面波形参数级路面波形函数,结合Matlab实现了对路面波形的重组。
(2)沥青路面的波形是沥青路面不平整的表现,路面波形与路面平整度密切相关;通过求解不同波形、不同行驶速度条件下车辆振动模型的动力响应,确定路面参数(波长λ、振幅A)及车辆行驶速度对车辆振动系统动力响应的关系。
(3)由软件模拟应用生成的路面波形图可建立起函数表达式,为以后检测提供一种新的检测模型及对应的路面平整度指标;同时为沥青路面后续铺筑养护提供技术参考。
