葡萄园植保机器人路径规划算法
2018-08-10艾长胜林洪川武德林冯志全
艾长胜,林洪川,武德林,冯志全
葡萄园植保机器人路径规划算法
艾长胜1,林洪川1,武德林2,冯志全1
(1. 济南大学机械工程学院,济南 250022; 2. 山东众和农业装备技术有限公司,栖霞 264000)
为提高植保机器人葡萄园作业在垄行识别和路径规划中的准确度和可靠性,该文提出了一种基于支持向量机(support vector machine,SVM)的多支持向量配比权重进行葡萄园垄行识别与农业机器人作业路径规划的算法。该算法利用Kalman滤波器对由激光雷达扫描获取的粗大实况果园数据信息进行预处理,校正数据中的噪声离群点,然后结合SVM,获得垄行环境中的分割超平面和分类边际线,最后根据样本点与分类边际线存在的几何间隔关系判别各点所占相对权重,获取垄线安全预估测位置并进行农业机器人作业导航线的规划拟合。通过对多个实际样本的试验与测试,拟合导航线与实际垄行中心线平均角度偏差为0.72°,相对植保机器人的平均距离偏差为4.22 mm。试验结果表明,该算法能够有效的识别与定位植保机器人所需导航线的位置,拟合的导航线满足葡萄园植保机器人准确作业的要求。
机器人;算法;雷达;垄线识别;路径规划;卡尔曼滤波器;支持向量机
0 引 言
葡萄是中国大宗水果产品之一,而当下,中国葡萄园种植管理工作依然以人工作业为主。70%左右植保机仍处于发达国家20世纪70至80年代水平。智能化程度低、成本高、作业效率低下、农药渗透伤害操作者等问题遏制着我国农业现代化的发展。随着葡萄种植规模的不断扩大,葡萄作业机械化已经成为必然趋势[1]。具备自动化能力的植保机成为实现农业现代化的关键组成部分。而植保机器人导航路径规划以及农田垄行识别是实现上述目标的关键技术之一。
聂森等[2]提出了一种基于HSV颜色空间中H、V二通道差值以及动态阈值分割的图像处理方法,通过Hough变换来实现果树垄行识别并拟合出导航中心线。张志斌等[3]提出了一种采用视觉处理,判别垄行间距实现路径规划的策略方法,通过对垄行图像进行灰度处理,拾取一系列垄行行向与列向特征点,来完成对农作物垄行结构的分析与识别,通过The least-square method拟合得到的农作物垄线以及植保机器人导航线。Torii等[4]采用图像处理的方法,根据果园作物区与犁沟区色差区别,运用最小二乘法获取植保机器人的期望导航路径。基于机器视觉所提出的一系列有关果园中植保机器人的导航策略方案,表现出感知方式便捷、内涵信息丰富、层次分明的优点,但同时,由于在图像处理过程中对环境光变化比较敏感,往往导致其不适合全天候工作[5-8]。熊斌等[9]设计了一种基于北斗卫星导航系统的差分式导航线获取方法,实现植保机器人的直线路径拟合,导航精度可达厘米级。Zhang等[10]通过RTK-GPS技术实时的获取植保机器人的目标路径,并通过与植保机器人的位姿状态进行比较,来实现植保机器人的自导航。周俊等[11]采用激光雷达捕获以垄行为种植特点果树树干信息,利用圆弧聚类的方法计算得到树干中心位置,从而间接获取植保机器人的导航路径。采用GPS-RTK技术实现植保机器人的自定位与导航能够满足高精度、速度快、适宜全天候作业的要求,但同时存在着成本高、难以推广的缺陷[12-15]。Freitas等[16]利用激光测距仪、编码器等多传感器感知果园垄行果树位置信息,并采用派生卡尔曼滤波器判别植保机器人相对垄行的位置以及植保机器人的导航路径。运用多传感器数据融合的方式来完成果园植保机器人的路径规划,具有各传感器优势互补、容错性高的优势,但时常伴随算法冗余度大,且数据融合、特征融合、决策融合过程复杂的缺点[17-20]。
国内针对农田或以间隔种植为主要特点的果园环境植保机器人的自动化技术研究较多,但针对以连续种植及分布为特点的葡萄园环境的相关研究较少;另外,各研究者为解决果园植保机器人自定位与导航问题提出了众多值得借鉴的策略方案,需要结合葡萄园特有的种植分布方式,设计一种可行的导航方案。
激光雷达在环境感知方面,具有抗干扰能力较强,适宜全天候作业,可使用果园现有果树作为参照物,进行相对位置识别的优势,且维护简单、适应性较强,能够简化植保机器人结构复杂度以及运行成本,成为目前解决该类问题的主流传感器。
本文根据葡萄园两侧垄行线性可分的特征,结合抗光线多变能力强以及数据输出简洁的激光雷达扫描实时获取的果园垄行实况数据信息,运用系统最优估计Kalman滤波器对原始样本信息进行滤波处理。结合支持向量机在二分类处理问题中的优越性,提出了一种基于支持向量机(support vector machine,SVM)的多支持向量配比权重判别垄行安全位置与机器人局部自导航算法,以期为植保机器人在葡萄园垄线识别和路径规划的研究提供一种方法。
1 研究方案
图1为实际葡萄园垄行种植情况,其中虚线由某一高度下垄行果树叶幕最大外延支出点(类比于SVM中的支持向量)连接而成。实线代表2条垄行的分类线(类比于SVM中的分割超平面)。
本文提出一种基于葡萄园作业环境下的植保机器人垄行识别以及路径规划策略方法。使用镭神智能公司生产的LS01C激光雷达作为果园环境探测器获知葡萄园垄行果树叶幕信息。该激光雷达的特性如表1所示。激光雷达扫描范围为0到6 m,扫描角度为360°全方位扫描,扫描精度为1°,扫描频率为11 Hz,其数据输出通过串口uart发送到上位机进行后续的处理。本文基于Matlab2015b进行算法的设计和数据的处理。激光雷达的数据是通过uart串口输出,本文使用了uart转USB模块实现数据格式的转换,然后利用Matlab2015b软件自带的Data Acquisition Toolbox工具包实现Matlab2015实时的读取PC机USB数据流,从而完成在Matlab2015b中对采样数据的即时处理。
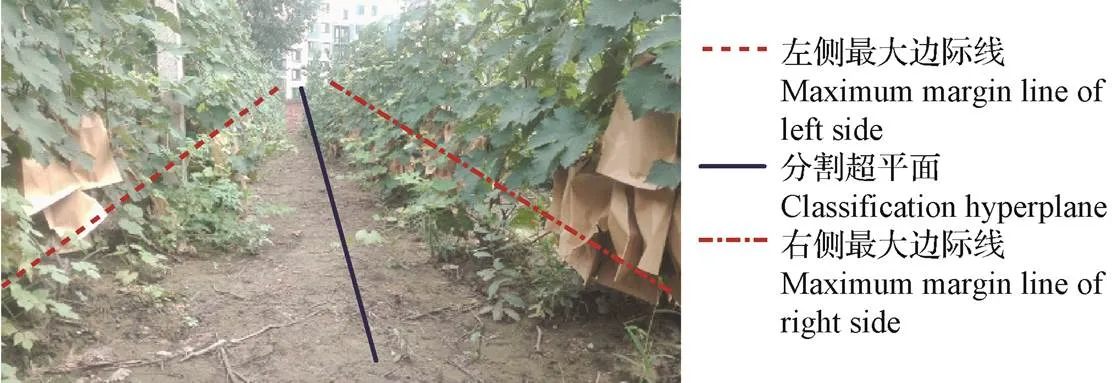
图1 葡萄园环境示意图

表1 激光雷达LS01C特性参数
1.1 卡尔曼滤波
雷达初步扫描捕获的葡萄园实况垄行叶幕信息中夹杂着各种各样的噪扰,其数据的可读性差。而实现对系统捕获的一系列的状态观测值的最优估计是卡尔曼滤波器的显著特征[21]。带有干扰与噪声的观测数据通过卡尔曼滤波器预估计可以较大程度上实现降噪功能,使数据去伪存真,因此其滤波过程可以达到最优估计的效果[22]。其便于编程,且即时处理特性明显以及工程实践经验丰富是能够使Kalman滤波器得到广泛应用的重要原因。实现Kalman滤波算法须明确其2个核心原理方程,即系统状态方程与动态系统测量方程[23]。
1)卡尔曼滤波算法的系统状态方程
系统方程为

式中(n)代表被观测叶幕点云的位置向量,反映的是第个被观测点的位置,且此时(n)可以作为第(1)个点的最优预测,1(n)代表观测过程中所包含的噪扰向量,其用来表现出被观测对象状态变化所夹杂的误差与干扰。×M是×阶矩阵,×N是×阶矩阵,二者代表对叶幕点云数据进行状态估计的各个系数矩阵,也即第(1)个点的位置估计状态参数。
2)卡尔曼滤波算法的动态系统测量方程
动态系统测量方程为

其中(n)代表叶幕点云数据不断更新的过程中最新点的位置状态向量,(n)具备了(-1)时刻更新点的最优状态预测;2(n)代表动态更新过程中所存在的噪扰向量,可以用来表现雷达动态观测过程中携带的误差与干扰;×M是×阶矩阵,其代表更新过程中各个系数矩阵,也即(n)以及其夹带的噪扰向量2(n)在×M与×N处理降噪过程中的预估参数。
1.2 支持向量机
垄行趋向的平行性是果园种植的突出特征,而其平行性即展现出了两侧垄行可进行二分类的显著特点。SVM的核心之意是探索存在的唯一一个具备间隔最大化的最优分类标准,该标准能够有效的进行二类辨别,其产生的分类结果符合自学习的要求[24]。因此本文采用SVM作为垄行辨别的骨架算法。支持向量机示意图如图2所示,正方形代表左侧待分类点,三角形为右侧待分类点。
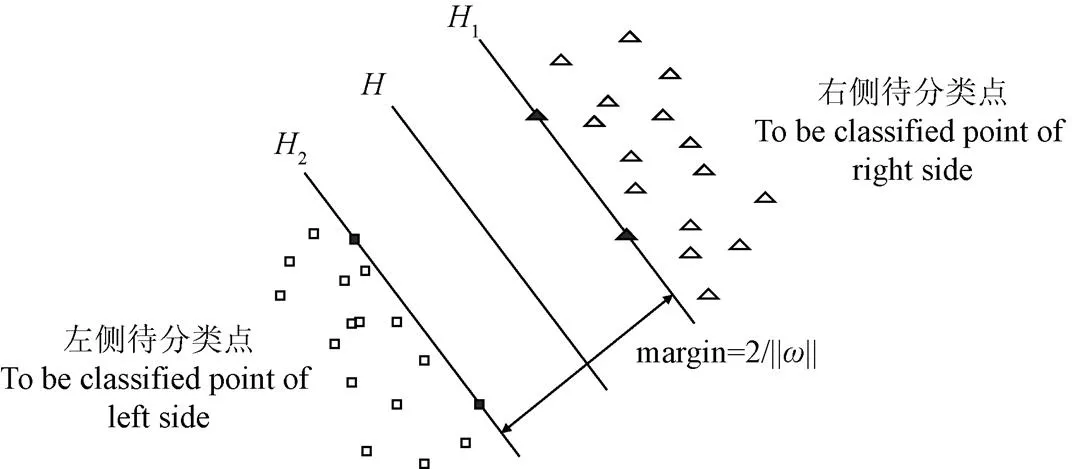
注:H1、H2为分类边际线。H为分隔超平面。margin:最大间隔。ω为超平面法向量。



最终,通过对的求解间接获取与最优估计

SVM在求解二分类最优解时展现出其显著的优越性,同时支持向量机丰富的实践经验成为其能够良好适用于典型问题的重要依据,其优势可见一斑[28]。
1.3 多支持向量配比权重
首先,植保机器人局部作业路径规划的精准实现依赖于垄行位置的准确判断。通常可由垄行所在直线位置间接获取居中导航线。但该策略存在着忽略了外延果树枝干枝叶所形成的刚性不可干涉碰撞区域的先天不足。在植保机器人实际作业当中,对于上述区域,因机树碰撞发生的可能性,将导致植保机器人工作的可靠性、安全性以及合理性大打折扣。间接设计合理措施进行人为干预方可避免干涉发生。垄行安全位置的提出可以弥补此类设计的缺陷,将工作的重心由精确判断垄行位置转移到垄行安全预估测位置的辨别上来。确定了垄行的安全位置,就能够获取植保机器人作业的安全区域,进而能够进一步的拟合出植保机器人局部最优导航路径。
其次,该分析方法的提出可以绕开由判断垄行精确位置过程所带来的沉重的算法策略设计困难。且最终实现的拟合效果更能够适应复杂多变的葡萄园环境。如图3所示,黑色虚线为直接使用SVM获得的分类边际线,点画线代表垄行位置,而实线是考虑了树干枝叶所形成的刚性不可干涉区域后,拟合的垄行安全预估测位置。
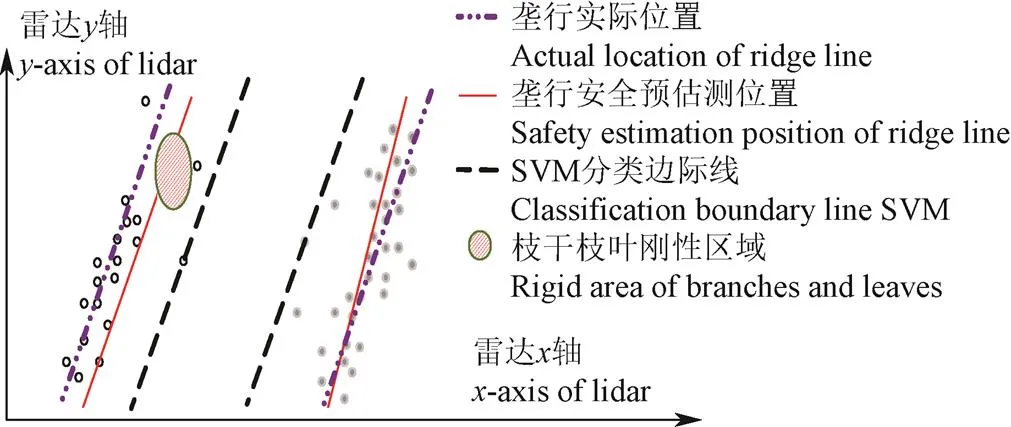
注:空心圆和实心圆代表待分类样本的左右两侧。
采用支持向量机的机制获得的分类效果如图3中黑色虚线所示,其可以将训练集分割为左右辨识度很高的两类结果,并称之为分类边际线。一方面,分类边际线的获取取决于支持向量的位置,它是一种少点决策机制,而不能代表该训练集中大多数样本所呈现的趋势,且受噪声点影响过大。另一方面,完全将整个训练集中的所有样本点考虑在内,进行形态估计,同样不能避免噪声影响,且预测精度将大打折扣。例如最小二乘,其模型的建立便是基于一种将在群点与离群点全部介入规划的代价优化策略。
基于以上问题的讨论,可以在SVM的分类结果的基础之上,进一步展开二次利用,基本思想如下。
1)借助SVM在二分类模型建立中的显著优越性,来寻求训练样本集的最优分类超平面,同时获得两侧分类边际线,方程如式(8)所示,分别为两边际线方程。
2)考虑垄行特殊环境——果树外延枝干枝叶。为避免植保机器人在行进过程中不与其发生碰撞与干涉,获得植保机器人在局部区域中自由安全的作业条件,采用多支持向量支撑边际线的方式,依据训练集各样本点与分类边际线之间的间隔关系为各样本点分配相应权重。由此拥有权重的点一定程度上又重新转化为支持向量点。此过程一方面可以充分利用支持向量机的分类结果有效扩充支持向量的数量。另一方面还能够将支持向量按权重进行等级划分,即点线间隔关系紧密的样本点成为权重占比高的支持向量点,点线间隔关系疏远的样本点成为权重占比低的支持向量点。

3)为分类边际线配比质量。边际线质量越大,所需大权重支持向量越多,或支撑点越多,从而依赖更多的支持向量来完成对边际线的支撑。
式中为分类边际线的预分配质量。
4)对获得的多支持向量进行拟合。从而获得垄行的安全预估测位置。
在支持向量机的基础上,多支持向量配比权重的理论方法一方面可以有效的消除SVM在果园垄行预测过程中无法忽略奇异点与噪音点所带来的预测失准的先天缺陷,另一方面还能够为植保机器人拟合出作业条件更为宽松与安全的工作环境。在消噪方面展现出更好的鲁棒性。
2 方案设置与试验
对基于支持向量机的多支持向量配比权重判别垄行安全预估测位置的理论方法的理解应注意以下几点。
1)将分类边际线质量化后,SVM产生的少量的参与分类决策的支持向量并不能够满足对分类边际线的完全支撑。一方面,拓展支撑向量的序列集并配以权重来实现所需的支撑功能,从而使新拟合出的垄行安全预估测位置能够更多的考虑到支撑能力更强的支持向量,避免代价估计;另一方面,在判别是否存在多支撑点聚集垄行果树枝干刚性不可干涉碰撞区域的情况中,所展现出的独特优势以及良好的鲁棒性是本文思想的核心。
2)垄行的安全预估测位置并不完全等价于垄行的实际位置,而是对植保机器人局部作业条件及其位置环境的安全性评估。在局部的葡萄园环境下,果树枝干的长势并不一定完全与垄行线吻合,可能存在外延伸出的枝干,形成图3中的枝干枝叶刚性区域,此时理想的导航中心线位置应当向另一侧偏移,才能保证植保机器人作业的安全性。
本文试验采集大量的实际葡萄园垄行数据信息,并进行相应的算法处理。下文以2个典型样本为例进行算法设计与处理效果的详细说明,并根据样本集中误差带的分布情况,选择5个代表性的样本进行误差分析。具体试验是在室外实际葡萄园中进行,垄行间距约为1.5 m,植保机器人的前进速度为0.15 m/s,试验条件为晴天,激光雷达的采样误差可以控制在毫米级。
2.1 样本尺度设计试验
采样范围过小将不能够真实有效的反映垄行走势,造成估测失败。鉴于植保机器人作业速度一般在0~0.3 m/s的范围之内,采样空间过大将会造成数据冗余,加重数据分析的负荷,且数据的采集应充分考虑历史数据(相对植保机器人身后的点)和当前数据(相对植保机器人身前的点),以保证植保机器人周边作业环境的安全性以及处理结果的可靠性。合理设计采样空间大小是试验分析正确与否的先决条件。图4为2个样本的原始数据分布情况。
对于植保机器人前进方向来说,相对其机身后的数据为历史数据,其机身前的数据为当前数据。单采用一种数据不利于垄行整体走势的判断。图4中深色遮阴区域表示当前数据,原点坐标表示激光雷达所处位置,浅色遮阴部分代表历史数据。两者融合可以清晰的观察到局部垄行的基本走势特点。以激光雷达为坐标原点,以激光雷达起始扫描位置为轴,建立横纵坐标系,轴代表相对激光雷达中心位置的横向距离,轴代表相对激光雷达中心位置的纵向距离。图4a、4b为样本1原始数据,图4c、4d为样本2原始数据。
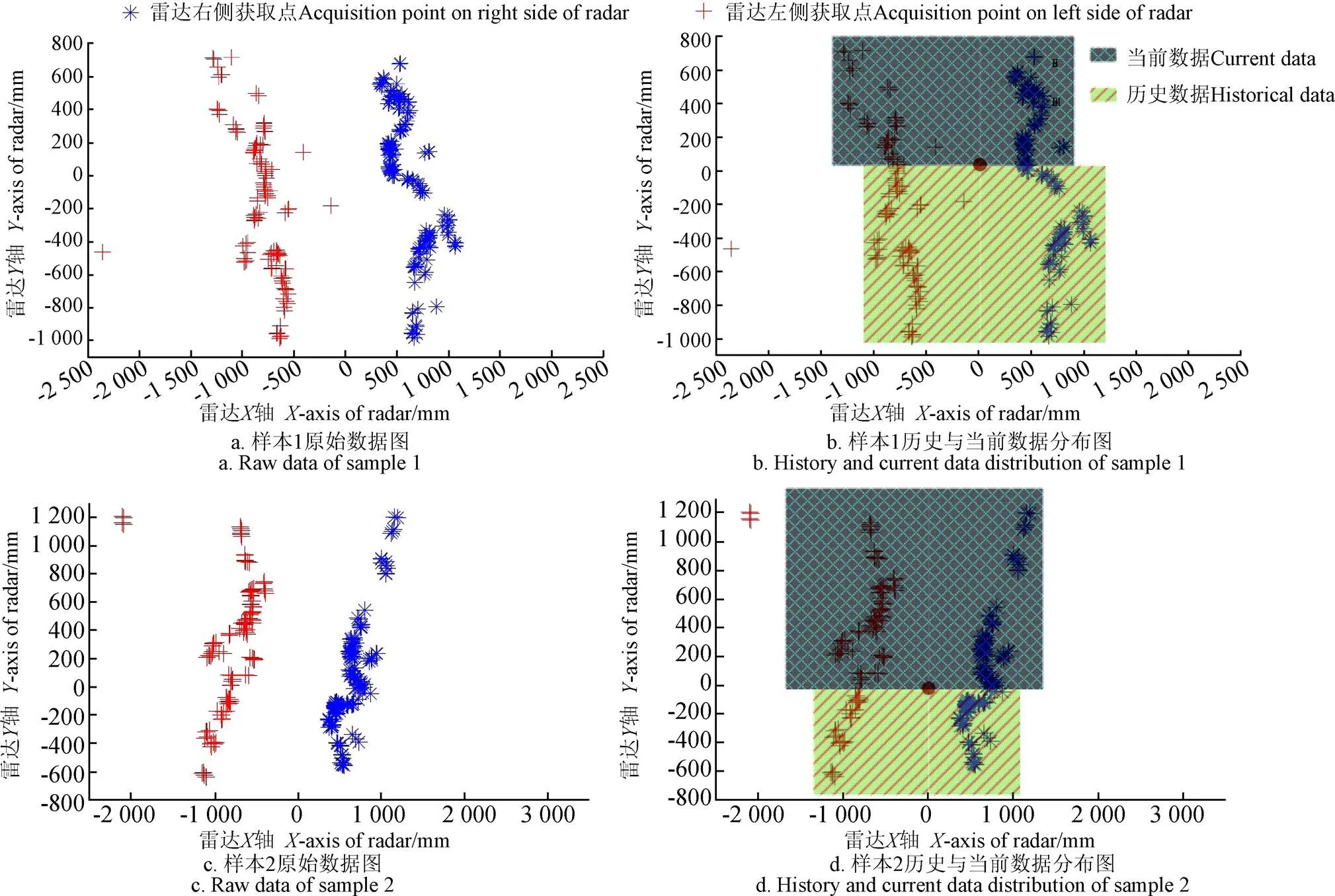
图4 垄行原始数据分布图
本试验根据植保机器人的作业速度为0.15 m/s的特点,设置激光雷达距离地面50 cm,摆放位置为水平,采样半径3 m。由表1可知,激光雷达的采样频率为11 Hz,获取3周采样数据仅消耗0.27 s。这段时间内局部垄行特征变化不大,因此本试验通过多组数据融合的方法——激光雷达LS01C每周可捕获360组极坐标下的(ρ,θ)。本试验利用3周扫描数据作为单次采样样本进行数据处理。从而有效的降低因果园检测环境多变,动态性较强等干扰因素带来的不确定性——进行原始数据的捕获。
2.2 阈值设定与卡尔曼滤波试验
设定阈值在剔除样本空间中的极远点与极近点方面能够展现出其简易、灵巧的优势[29]。但只单纯采取一种方法依然不能够完成现实作业生产的需求。卡尔曼滤波器在消除奇异噪声、趋势预测以及增强数据可读性方面拥有丰富的实践应用经验,其计算量较小且能够展现出良好的抗干扰能力[30]。因此本试验采用阈值设定与卡尔曼滤波的综合策略来对获取的垄行原始数据进行预前处理。首先通过设定阈值滤除样本数据中的极远点与极近点,如图5a、图5c中的圆圈圈出的点,然后使用卡尔曼滤波器对样本数据进行消噪处理。图5b为样本1效果图,图5d为样本2效果图。
在图5中,以激光雷达为坐标原点,以激光雷达起始扫描位置为轴,建立横纵坐标系,轴代表相对激光雷达中心位置的横向距离,轴代表相对激光雷达中心位置的纵向距离。由图5a、图5c可观察到圆圈中的点是以激光雷达为中心的3 m以外以及100 mm以内的扫描点,此时经分析可知此类点多为激光测距扫描仪反馈数据样本集中所夹杂的硬性干扰与粗大噪声。其中邻近环境中相同或近似的光源频率、被观察对象表面反射线的丢失、过大的入射角以及雷达相近区域遮挡物导致的扫描盲区是该类噪扰产生的重要因素。该类点会对数据分析带来不利的波动和干扰,还会额外的提高对样本训练集处理的难度与分析的迭代量,因此须间接采用方法予以滤除。
由图5可以观察到,通过设定阈值与卡尔曼滤波器综合应用的策略,一方面有效的滤除了极点,另一方面得到的效果大大的提高了数据的可读性,使结果具备了更多的垄行信息,进一步便利了后续对数据的处理。

图5 阈值设定与卡尔曼滤波效果图
2.3 基于SVM的试验与分析
在葡萄园中果树种植的特殊环境为使用SVM机制提供了可能,以垄行为种植特点的果园完全可以类比于能够进行二分类的一簇数据点。而通过分类器的处理之后,其两侧边际线与果树枝叶表面所形成的峰值点相呼对应。且此对类别线是保证两侧垄行果树进行正确分类的极限,而最终形成的分割超平面必将位于两侧垄行果树枝叶所形成的边际线之间的中心位置。具体分类效果如图6所示,图6a为样本1分类效果图,图6b为样本2分类效果图。
在图6中,以激光雷达为坐标原点,以激光雷达起始扫描位置为轴,建立横纵坐标系,轴代表相对激光雷达中心位置的横向距离,轴代表相对激光雷达中心位置的纵向距离。理想导航线为实际测量的相应的局部垄行的中线位置,即最佳导航线位置。分类线为直接使用SVM分类方法获取的分类超平面的位置。SVM依据最大间隔的思想获得的分类结果能最大程度满足分类的准确性和唯一性,且为后续试验在判别垄行安全预估测位置与植保机器人导航线的规划问题上奠定可靠基础。在图6中可以清楚的观察到,理想导航线与SVM分类线存在相当大的误差。本文在不同的实际葡萄果园局部垄行环境下进行了 试验,测量了激光雷达分别与理想导航线以及分类线的距离以及理想导航线与分类线的方向角度,具体数据如表2所示。

图6 SVM分类效果图
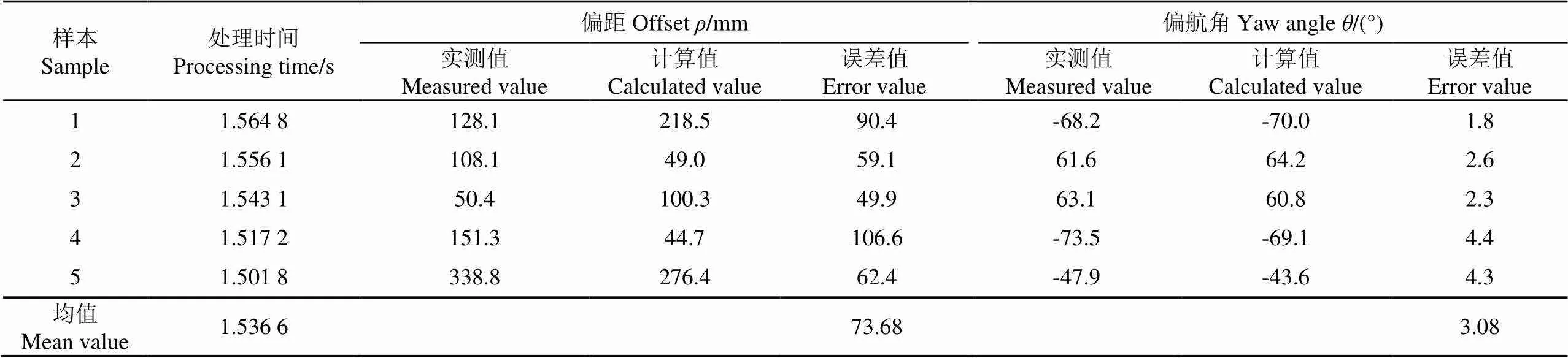
表2 各样本的SVM分类试验结果
在表2中,实测值为激光雷达与理想导航线之间的距离以及理想导航线的方向角,计算值为激光雷达与SVM分类线的距离以及SVM分类线的方向角。误差值为实测值与计算值之差。其中的平均误差为73.68 mm,的平均误差为3.08°,处理一次数据平均耗时1.536 6 s。由图6观察,单纯使用SVM策略对采样数据集进行训练,得到的效果依然与实际情况偏差较大。边际线位置与实际垄行位置未能发生吻合效应,是导致分类失准的根本原因,另外,垄行部分果树枝干、叶幕外延伸出,形成不可碰撞的刚性区域,造成单纯使用SVM获取的支持向量以及边际线与实际垄行线位置偏差变大,也是表2中误差较大的原因。
2.4 多支持向量配比权重估测垄行安全位置试验

图7 权重函数示意图
随机抽样一致性算法(random sample consensus, RANSAC)[31],是一种通过迭代,在包含内外点的训练样本中寻找最优拟合线估测模型的方法[32],可以有效的避免代价估计造成的高成本以及高失误率的问题[33]。本文利用RANSAC机制对获得的(x,y)序列进行拟合,得到两侧垄行安全预估测位置,并最终得到最优平均——植保机器人局部导航线。效果如图8所示。
图8中,以激光雷达为坐标原点,以激光雷达起始扫描位置为轴,建立横纵坐标系,轴代表相对激光雷达中心位置的横向距离,轴代表相对激光雷达中心位置的纵向距离。实线为根据配比权重的多支持向量预判出的垄行安全估测位置以及植保机器人局部作业的拟合导航路径。虚线表示单纯使用SVM策略得到的分类效果。通过对SVM进行权重分析后,获得本算法拟合导航线位置,其与垄行中线位置基本重合。且激光雷达分别与理想导航线及拟合导航线的距离以及理想导航线与拟合导航线的方向角度,具体数据如表3所示。

图8 多支持向量配比权重分类效果图

表3 各样本的多支撑向量配比权重分类结果
在表3中,实测值为激光雷达与理想导航线之间的距离以及理想导航线的方向角,计算值为激光雷达与拟合导航线的距离以及拟合导航线的方向角。误差值为实测值与计算值之差。其中的平均误差为4.22 mm,的平均误差为0.72°,处理一次数据平均耗时2.060 4 s。通过与表2对比,在SVM的基础上,配比权重的多支持向量分析方法更能够贴合在实际中植保机器人作业环境的要求,也正是由于引入垄行安全预估测位置,使得理想导航线与拟合导航线的位置重合度更高。
3 结论与展望
基于SVM的多支持向量配比权重判别垄行安全预估测位置以及植保机器人局部导航路径规划的算法策略在实际试验中表现出准确度高、可靠性强等优势。偏距的平均误差为4.22 mm,偏航角平均误差为0.72°。
本文在基于支持向量机线性分类器的方法应用基础上,利用葡萄园两侧垄行线性可分的内在特点,设计了配比权重的多支持向量,进一步提高SVM在葡萄园这一特定作业环境下的适用性。同时,本文所提出的算法也可应用于其他的以连续种植及分布为特点的垄行作业环境中,如黄瓜园等。但从多分类、策略优化和分类器的改进入手,提高该算法的智能性和快速即时性是未来研究的重中之重。
[1] 李鑫,曹少波,杨欣,等. 适于机械化作业的葡萄栽培技术规程研究[J]. 中国农机化学报,2017,38(2):120-123.
Li Xin, Cao Shaobo, Yang Xin, et al. Cultivation technical regulations for grape suitable for mechanized operation[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(2): 120-123. (in Chinese with English abstract)
[2] 聂森,王丙龙,郝欢欢,等. 基于机器视觉的果园导航中线提取算法研究[J]. 农机化研究,2016,38(12):86-89.
Nie Sen, Wang Binglong, Hao Huanhuan,et al. Navigation line extraction based on machine vision in orchard[J]. Journal of Agricultural Mechanization Research, 2016,38(12): 86-89. (in Chinese with English abstract)
[3] 张志斌,潘华稳,李琛,等. 一种基于平均垄间距的视觉导航垄线识别算法[J]. 计算机工程与应用,2011,47(22):191-194.
Zhang Zhibin, Pan Huanwen, Li Chen, et al. Crop rows identification based-row interval for field vision guidance system[J]. Computer Engineering and Applications, 2011, 47(22): 191-194. (in Chinese with English abstract)
[4] Torii T, Kitade S, Teshima T, et al. Crop row tracking by an autonomous vehicle using machine vision (part 1):Indoor experiment using a model vehicle[J]. Journal of the Japanese Society of Agricultural Machinery, 2000, 62(5): 37-42.
[5] 陈娇,姜国权,杜尚丰,等. 基于垄线平行特征的视觉导航多垄线识别[J]. 农业工程学报,2009,25(12):107-113.
Chen Jiao, Jiang Guoquan, Du Shangfeng, et al. Crop rows detection based on parallel characteristic of crop rows using visual navigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(12): 107-113. (in Chinese with English abstract)
[6] 陈军,蒋浩然,刘沛,等. 果园移动机器人曲线路径导航控制[J]. 农业机械学报,2012,43(4):179-182,187.
Chen Jun, Jiang Haoran, Liu Pei, et al. Navigation control for orchard mobile robot in curve path[J]. Tansactions of the Chinese Society for Agricultural Machinery, 2012, 43(4): 179-182,187. (in Chinese with English abstract)
[7] 袁池,陈军,武涛,等. 基于机器视觉的果树行中心线检测算法研究[J]. 农机化研究,2013,35(3):37-39.
Yuan Chi, Chen Jun, Wu Tao, et al. Algorithms of machine vision-based centerline detection of fruit tree rows[J]. Journal of Agricultural Mechanization Research, 2013, 35(3): 37-39. (in Chinese with English abstract)
[8] Xue Jinlin, Zhang Lei, Tony E G. Variable field-of-view machine vision based row guidance of an agricultural robot[J]. College of Engineering, 2012, 84: 85-91.
[9] 熊斌,张俊雄,曲峰,等. 基于BDS的果园施药机自动导航控制系统[J]. 农业机械学报,2017,48(2):45-50.
Xiong Bin, Zhang Junxiong, Qu Feng, et al. Navigation control system for orchard spraying machine based on Beidou Navigation satellite system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2): 45-50. (in Chinese with English abstract)
[10] Zhang Q, Qiu H. A dynamic path search algorithm for tractor automatic navigation[J]. Transactions of the Asae, 2004, 47(2): 639-646.
[11] 周俊,胡晨. 密植果园作业机器人行间定位方法[J]. 农业机械学报,2015,46(11):22-28.
Zhou Jun, Hu Chen. Inter-row localization method for agricultural robot working in close planting orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11): 22-28. (in Chinese with English abstract)
[12] Erkan Kayacan, Erdal Kayacan, Herman Ramon, et al. Distributed nonlinear model predictive control of an autonomous tractor–trailer system[J]. Mechatronics, 2014, 24: 926-933.
[13] 罗锡文,张智刚,赵祚喜,等. 东方红X-804拖拉机的DGPS自动导航控制系统[J]. 农业工程学报,2009,25(11):139-145.
Luo Xiwen, Zhang Zhigang, Zhao Zuoxi, et al. Design of DGPS navigation control system for Dongfanghong X-804 tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(11): 139-145. (in Chinese with English abstract)
[14] 张智刚,罗锡文,李俊岭. 轮式农业机械自动转向控制系统研究[J]. 农业工程学报,2005,21(11):85-88.
Zhang Zhigang, Luo Xiwen, Li Junling. Automatic steering control system of wheeled model farming machinery[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(11): 85-88. (in Chinese with English abstract)
[15] 陈艳,张漫,马文强,等. 基于GPS和机器视觉的组合导航定位方法[J]. 农业工程学报,2011,27(3):126-130.
Chen Yan, Zhang Man, Ma Wenqiang, et al. Positioning method of integrated navigation based on GPS and machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 126-130. (in Chinese with English abstract)
[16] Freitas G, Zhang J, Hamner B, et al. A Low-Cost, Practical Localization System for Agricultural Vehicles[M]. Intelligent Robotics and Applications. Springer Berlin Heidelberg, 2012: 365-375.
[17] Vijay S, Thomas F B, Arroyo A A. Development of machine vision and laser radar based autonomous vehicle guidance systems for citrus grove navigation[J]. Computers and Electronics in Agriculture, 2006, 53: 130-143.
[18] Mariano Gonzalez-de-Soto, Luis Emmi, Manuel Perez-Ruiz, et al. Autonomous systems for precise spraying-Evaluation of a robotised patch sprayer[J]. Biosystems Engineering, 2016,146:165-182.
[19] Oscar C B, Akira M, Kazunobu I N N. Development of an autonomous navigation system using a two-dimensional laser scanner in an orchard application[J]. Biosystems Engineering, 2007, 96(2): 139-149.
[20] Jacqueline Libby, George Kantor. Accurate gps-free positioning of utility vehicles for specialty agriculture[J]. ASABE Annual International Meeting, 2010, 15(2): 20-23.
[21] 鄢丹青. 空间Kalman滤波与空时Kalman滤波算法[J]. 兰州理工大学学报,2016,42(2):153-157.
Yan Dangqing. Spatial Kalman filtering and spatial-temporal Kalman filtering algorithm[J]. Journal of Lanzhou University of Technology, 2016, 42(2): 153-157. (in Chinese with English abstract)
[22] 邓胡滨,张磊,吴颖,等. 基于卡尔曼滤波算法的轨迹估计研究[J]. 传感器与微系统,2012,31(5):4-7.
Deng Hubin, Zhang Lei, Wu Ying, et al. Research on track estimation based on Kalman filtering algorithm[J]. Transducer and Microsystem Technologies, 2012, 31(5): 4-7. (in Chinese with English abstract)
[23] 刘桂辛. 改进的自适应卡尔曼滤波算法[J]. 电子设计工程,2016, 24(2):48-51.
Liu Guixin. The improved adaptive Kalman filter algorithm[J]. Electronic Design Engineering, 2016, 24(2): 48-51. (in Chinese with English abstract)
[24] 郭明玮,赵宇宙,项俊平,等. 基于支持向量机的目标检测算法综述[J]. 控制与决策,2014, 29(2):193-200.
Guo Mingwei, Zhao Yuzhou, Xiang Junping, et al. Review of object detection methods based on SVM[J]. Control and Decision, 2014, 29(2): 193-200. (in Chinese with English abstract)
[25] 帅勇,宋太亮,王建平. 考虑全过程优化的支持向量机预测方法[J]. 系统工程与电子技术,2017,39(4):931-940.
Shuai Yong, Song Tailiang, Wang Jianping. Method on support vector machine prediction considering whole process optimization[J]. System Engineering and Electronics, 2017, 39(4): 931-940. (in Chinese with English abstract)
[26] 郭晨晨,朱红康. 一种改进的支持向量机模型研究[J]. 陕西科技大学学报,2017,35(2):189-194.
Guo Chenchen, Zhu Hongkang. Research on improved support vector machine model[J]. Journal of Shanxi University of Science & Technology, 2017, 35(2): 189-194. (in Chinese with English abstract)
[27] 苏成利,郑博元,李平. 基于自适应边界向量提取的多尺度-支持向量机建模[J]. 控制与决策,2015,30(4):721-726.
Su Chengli, Zheng Boyuan, Li Ping. Multiscale-support vector machine modelong based on adaptive boundary vector extraction[J]. Control and Decision, 2015,30(4): 721-726. (in Chinese with English abstract)
[28] Khemchandani R, Sharma S. Robust least squares twin support vector machine for human activity recognition[J]. Applied Soft Computing, 2016, 47: 33-46.
[29] 姚家扬,罗志增. 一种基于新型阈值函数小波去噪方法[J].杭州电子科技大学学报,2015, 35(4):80-83.
Yao Jiayang, Luo Zhizeng. Research on wavelet denoising based on a new threshold function[J]. Journal of Hangzhou Dianzi Universit, 2015, 35(4): 80-83. (in Chinese with English abstract)
[30] 磨少清,刘正光,张军,等. 基于图像自身信息的图像边缘检测阈值自动设定方法[J]. 光电子·激光,2011, 22(8):1246-1250.
Mo Shaoqing, Liu Zhengguang, Zhang Jun, et al. An unsupervised threshold selection method for edgr detection based on image self-information[J]. Journal of Optoelectronics·Laser, 2011, 22(8): 1246-1250. (in Chinese with English abstract)
[31] 袁清珂,张振亚,毕庆. 改进RANSAC算法在直线拟合中的应用[J]. 组合机床与自动化加工技术,2015(1):123-125.
Yuan Qingke, Zhang Zhenya, Bi Qing. Linear fitting application based on the improved RANSAC algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2015(1): 123-125. (in Chinese with English abstract)
[32] 吴剑亮,李艳,高扬,等. 基于改进RANSAC算法的道路直线提取方法[J]. 地理空间信息,2017, 15(5):42-44.
[33] 张永祥,古佩强,穆铁英. 改进的RANSAC基础矩阵估计算法[J]. 小型微型计算机系统,2016,37(9):2084-2087.
Zhang Yongxiang, Gu BeiQiang, Mu TieYing. Improved RASANC algorithm for fundamental matrix estimation[J]. Journal of Chinese Computer Systems, 2016, 37(9): 2084-2087. (in Chinese with English abstract)
Path planning algorithm for plant protection robots in vineyard
Ai Changsheng1, Lin Hongchuan1, Wu Delin2, Feng Zhiquan1
(1. College of Mechanical Engineering, Jinan University, Jinan 250022, China; 2. Zhonghe Agricultureal Equipment Technology Co. Ltd. Of Shandong Province, Qixia 264000, China)
To meet the requirements of accuracy and reliability of plant protection robot in ridge identification and route planning, also improve the working conditions of farmers, and achieve an unmanned operation purpose, an algorithm based on multi-support-vector proportioning weight of SVM (support vector machine) to identify the ridge line of vineyards, and the path planning of plant protection robots were proposed. The strategy first uses Kalman filter to pre-process coarse orchard data information obtained by Lidar scanning. According to the principle that Kalman filter complies with Gaussian distribution, the prior point between 2 adjacent points was taken as the prior state, and the latter point was used as the observed point to obtain posteriori state estimation, so as to realize data integration and analysis. With its good system state estimation characteristics, the collected data can be used to judge the trend of the ridge line, so as to correct the noise outliers in the data and improve the readability of the data. Then according to the characteristics of the vineyard branch ridge and the characteristics of ridges line with clearly separable spacing, and corresponding to the situation that the ridge line on both sides can be completely separated, the method was combined with SVM linear classification. With the unique advantages of the classification and due to that SVM can search the unique segmentation hyperplane, the maximum interval and segmentation hyperplane, classification margins in the ridge environment could be gotten. The split hyperplane obtained at this time would be between ridge lines. However, there was a big deviation from the angle of the direction of the ridge line and the horizontal distance. It could not meet the precise operation requirements of plant protection robots. It needed further data processing and analysis. In order to obtain accurate position of the center of ridge line, finally, the relative weights were assigned to the sample points of each ridge based on the geometric interval relationship between the sample points on both sides of the ridge and the corresponding SVM classification marginal line. The classification marginal line was reformed according to the number of sample points and the relative weights. According to the condition of the product of the interval relationship between each sample point and the classification margin, their relative weight must be consistent with the quality value of classification margin. The random sampling consistency iteration method (RANSAC) would avoid the error of cost estimate, and could estimate the parameters of the mathematical model from a group of observed data with outliers, so as to obtain the predicted safety location of the ridge. Although the pre-estimated security location of ridge line was not necessarily consistent with the actual location of the vineyard ridge, navigation line could be obtained indirectly by the security ridge line on both sides and the principle of angle bisector which could meet the requirements of precision operation of plant protection robot. Operation guidance line for plant protection robot could be acquired. After a number of actual samples were tested, the average angular deviation between the fitted navigation line and the actual ridge centerline was 0.72°, and the average distance deviation of the relative plant protection robot was 4.22 mm. Experimental results showed that this algorithm could effectively identify and locate the navigation route needed by the plant protection robot. The fitted navigation line could meet the requirements of accurate operation of the plant protection robot in the vineyard. However, the redundancy of the algorithm was relatively large, and the time required to process data in a single time was about 2.05 s. With the accelerated calculation speed of the processor in the future, the algorithm provided in the article can provide a reference solution for such a problem.
robots; algorithms; radar; ridge recognition; path planning; Kalman filter; support vector machine
2017-12-02
2018-04-12
山东省农机装备研发创新计划项目(项目编号2015YB204)
艾长胜,教授,主要从事嵌入式计算机测控系统开发、智能控制和智能机器人技术。Email:me_aics@ujn.edu.cn
10.11975/j.issn.1002-6819.2018.13.010
TP391.4
A
1002-6819(2018)-13-0077-09
艾长胜,林洪川,武德林,冯志全.葡萄园植保机器人路径规划算法[J]. 农业工程学报,2018,34(13):77-85. doi:10.11975/j.issn.1002-6819.2018.13.010 http://www.tcsae.org
Ai Changsheng, Lin Hongchuan, Wu Delin, Feng Zhiquan. Path planning algorithm for plant protection robots in vineyard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 77-85. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.13.010 http://www.tcsae.org