缩比模型尾旋自动进入及改出控制律初探
2018-05-05韩意新方自力李艺海
韩意新,方自力,李艺海
(中国飞行试验研究院,陕西 西安 710089)
尾旋是飞机最复杂和最危险的飞行状态之一,直接危及飞行员和飞机的安全。作为飞行禁区的尾旋,被世界航空界形象地称为“死亡螺旋”。国外航空发达国家非常重视尾旋的研究工作,为验证第三、四代战斗机尾旋机动能力,开展了大量的缩比模型自由飞试验,利用模型自由飞探索尾旋进入、改出方法,研究有利于弄清尾旋发生、发展机理,有效保障飞行安全。本文利用缩比模型,探索了尾旋自动进入、改出方法,研究结果可供相关研究人员参考。
1 缩比模型控制系统组成
飞行控制系统是缩比模型的控制指挥中心,主要由飞行控制芯片、传感器系统和执行机构3大部分组成。其中,飞行控制芯片在整个系统中处于核心地位,它根据输入的控制指令采集传感器提供的参数,按照设计的控制算法及逻辑产生控制指令,通过控制执行机构以实现对缩比模型飞行的控制。本文选用的芯片信号为STM32F427VI。传感器系统是为飞行控制提供各种飞行参数的装置,包括测量三轴角速率的陀螺组,测量三轴线加速度的加速度计组,测量航向的罗盘,测量位置、高度、速度等信息的GPS、高度计、空速计等。舵机是缩比模型上的执行机构,它的作用是将接收的电信号转变成机械位移量,带动舵面或发动机油门偏转,实现对飞机姿态位置或发动机转速的控制。舵机的控制信号采用PWM脉宽调制信号,控制信号对舵机的控制就是改变PWM信号的占空比,利用占空比的变化改变舵机位置。此外,飞行控制系统还包括“遥控—自主”切换开关、Futaba遥控器、遥控信号接收器、无线通讯模块和地面遥控遥测控制台等链路系统组件。
2 尾旋自动进入控制律
尾旋自动进入控制律分为2部分,原理图见图1,第一部分为按减速率的拉杆模块,第二部分为尾旋进入操纵模块。首先由航模操纵手将发动机置于慢车状态,保持高度,空速稳定后启动尾旋自动进入控制律。
按减速率的拉杆模块:纵向通过空速反馈计算拉杆量,以维持1 kn/s的减速率;横航向启动姿态保持模式。
尾旋进入操纵模块:迎角超过一定门限后,施加蹬满舵操纵。待尾旋圈数、尾旋时间或飞机高度达到一定门限后自动启动尾旋自动改出控制律。

图1 尾旋自动进入控制律原理图
3 尾旋自动改出控制律
在尾旋改出过程中,由于航模操纵手注意力不集中等心理因素,往往反应滞后,甚至有可能进行错误操纵,导致飞机加速进入尾旋。
本文设计了尾旋自动改出控制律,其原理图见图2.与人工尾旋改出相比,自动尾旋改出具有改出操纵正确、改出时间短、能防止再次进入尾旋等优点。
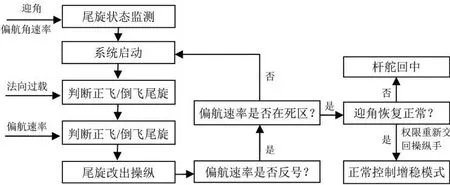
图2 尾旋自动改出控制律原理图
尾旋的自动改出控制律分2部分,第一部分为尾旋识别模块,第二部分为尾旋改出操纵模块。
尾旋识别部分:通过迎角及偏航角速率判断航模此时是否处于尾旋状态,通过法向过载识别正飞/倒飞尾旋,通过偏航角速率方向识别尾旋方向。
尾旋改出操纵模块:根据尾旋识别模块提供的信息,施加反舵、杆回中的反尾旋操纵,并保持上述操纵直至偏航速率出现反号并在死区范围内,随后杆舵回中。待迎角恢复正常后,控制律自动切回正常控制增稳模式,控制权限重新交回航模操纵手中。
4 结束语
通过实际试飞验证,系统能可靠地进入及改出尾旋,后续可进一步开展带推力矢量大迎角控制律开发。
参考文献:
[1]中华人民解放军总装备部.GJB 3814—99军用飞机失速/过失速/尾旋试飞验证要求[S].[出版地不详],1999.
