用于在轨装配锁紧释放机构的设计*
2018-05-02阮伟靖薛百文高碧祥庞羽佳杨臻
阮伟靖,薛百文,高碧祥,庞羽佳,杨臻
(1.中北大学 机电工程学院,山西 太原 030051;2.四川航天电子设备研究所,四川 成都 610102; 3.中国空间技术研究院,北京 100094)
0 引言
空间技术处于现代高技术信息化战争的制高点,是世界各国争相发展的军事战略核心之一[1-2]。针对传统空间站的技术限制以及未来空间站的发展方向,亟需发展一种新型的航天技术来将受限制的天基平台、大型武器装备等大质量、大体积的地面装备拆卸后分批次发射到空间中,模块化航天器设计概念应运而生[3]。模块化航天器(modular spacecraft design, MSD)是使航天器系统能够在轨组装、在轨模块更换、补加扩展、升级等服务的首要条件[4]。
航天器在轨装配技术是模块化航天器的重要组成部分。本文基于空间结构在轨组装与构建的典型应用需求,设计用于在轨装配的锁紧释放机构[5-7]。该结构由空间基础平台上的机械臂对地面发射的有效载荷进行操作,从而实现航天器的在轨装配。
1 锁紧释放机构
在轨装配模块的地面原理样机如图1所示,共分为4个模块:主动模块、被动模块、试验架模块和连接检测通信模块。其中,主动模块包括:壳体机构、导向阻尼机构和定位件。被动模块包括:安装平台、锁紧释放机构和定位接纳件。在轨装配模块具体结构如图2所示。
锁紧释放机构安装于被动模块底部,当与主动模块上的导向阻尼机构配合时,完成被动模块对主动模块的锁紧动作;当锁紧爪锁紧到位时,触发到位检测按键,在显示系统上显示锁紧到位;当主动模块需要被释放时,基本系统给出释放信号,锁紧释放机构中的记忆合金压缩弹簧受热伸展,顶开锁紧爪,完成对主动模块的释放动作。锁紧释放机构的爆炸图和结构图如图3所示。
2 锁紧释放机构工作过程
在轨装配模块的锁紧释放机构工作过程分为2个过程。锁紧过程包括:导向头到位;推杆推动触发套筒同时锁紧爪回转;锁紧爪到位完成对锁紧盖的锁紧。释放过程包括:电阻丝被加热,记忆合金弹簧(以下简称SMA弹簧)受热伸长并通过记忆合金套筒顶开锁紧爪;锁紧爪释放到位,主动模块在机械臂操作下与被动模块分离;对电阻丝停止加热,SMA弹簧恢复初始状态,完成释放过程。系统工作循环图如表1所示。
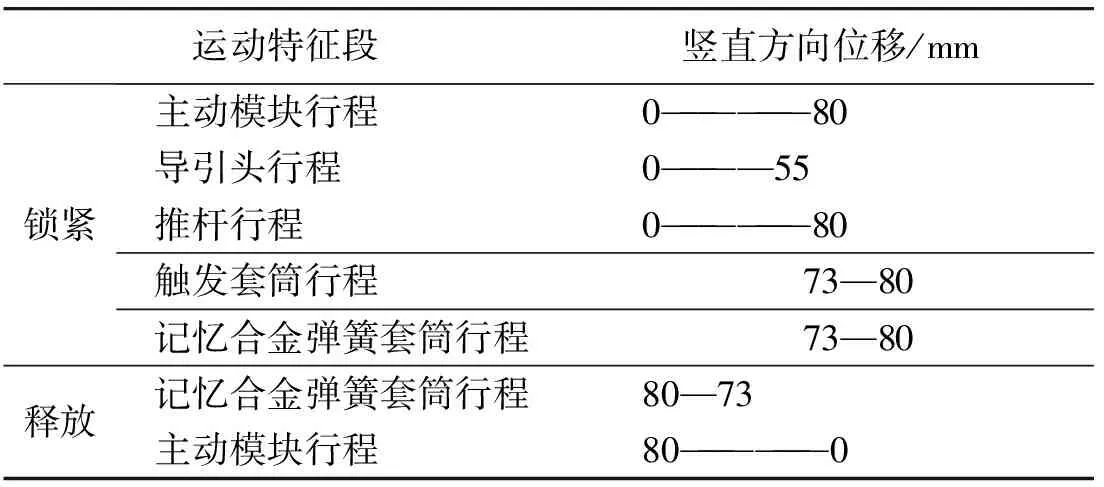
表1 系统工作循环表
2.1 “无源”锁紧工作过程
在轨装配模块的“无源”锁紧技术指主动模块在装配时,仅依靠机械臂作为动力源对整个锁紧动作提供动力,即在锁紧释放模块中不存在动力装置——如电机等,这不仅大大缩减了锁紧释放模块的体积和质量,还降低了锁紧释放模块的结构复杂程度。
锁紧过程中,当导引头到位后主动模块和推杆等在主动力的作用下继续运动,推杆在空载一段行程后,推动触发套筒向下运动,压缩触发簧,从而释放锁紧扭簧的预存能量,使锁紧爪在锁紧扭簧的作用下回转并压缩在常温下几乎不存在弹簧刚度的记忆合金弹簧,当触发套筒运动到位后,锁紧爪也会完成对锁紧盖的锁紧动作,该段运动简图如图4所示。
在“无源”锁紧中至关重要的功能是锁紧爪锁紧完成时所具备的自锁功能。该自锁功能主要运用了连杆机构中的“死点”位置[8]。当主动模块受到分离力时,锁紧爪受到的力与锁紧爪回转中心处在同一直线位置,即不存在回转力臂。所以在此位置上,该锁紧方式具备了可靠的自锁功能,锁紧爪锁紧时的受力分析如图5所示。
2.2 SMA弹簧释放过程
由于锁紧释放机构整体体积小,安装空间有限,因此选用具有结构小型化、结构简单特点的SMA弹簧作为驱动器[9]。形状记忆合金是拥有形状记忆效应的材料,合金处于低温相时变形,加热到临界温度(逆相变点)通过逆相变恢复其原始形状,称之为形状记忆效应[10]。
在释放工作过程中SMA弹簧释放主动模块的工作过程如图6所示。
3 SMA弹簧参数计算
从分离过程可知,SMA弹簧所提供的机械力是影响锁紧爪完成释放动作的主要因素,故对锁紧爪进行受力分析,受力分析如图7所示。
(1)
式中:f为摩擦系数,航天裸露金属存在接触表面为防止冷焊现象[11],需镀二硫化钼,其摩擦系数值为0.05[12];N为锁紧扭簧提供的锁紧簧力,其值为69 N;M为锁紧扭簧在锁紧时提供的锁紧力矩,其值为74 N·mm。
根据上述的计算公式和相关数值,计算得出SMA弹簧应提供的机械力F≥10.5 N,考虑其余影响因素,在机械力F的基础上乘以系数1.5,得到记忆合金弹簧应提供机械力16 N。
在常用的记忆合金材料当中,主要为TiNi合金和CuZnAl合金等。表2为常用记忆合金的材料属性。
因模块化航天器的工作要求,锁紧释放机构要求性能可靠以及可重复使用,故选择TiNi合金。

表2 常用记忆合金的材料属性
现已知TiNi合金的最大剪切应力τmax=120 MPa,τH=247.5 MPa,TiNi合金的γmax=0.018,剪切应变母相的剪切模量GH=23 GPa,马氏体的剪切模量GL=8 GPa,输出力P=16 N,输出位移δ=10 mm,弹簧指数C=5,根据记忆合金弹簧的计算公式[6],可以得到记忆合金弹簧参数:
(2)
(3)
D=Cd=5.5 mm,
(4)
(5)
γδ=γmax-γH=0.007,
(6)
(7)
式中参数说明详见参考文献[13],在此不作赘述。SMA弹簧和锁紧扭簧等弹簧参数具体如表3所示。

表3 弹簧参数表
4 ADAMS仿真分析
建立样机模型后,通过动力学仿真分析软件MSC-ADAMS,对虚拟样机进行仿真分析[14-15]。
4.1 建模假设
在轨装配模块模型零部件较多,系统较为复杂,对模型进行合理地简化和假设,可以把复杂问题简单化,有利于动力学模型的建立和仿真。现对在轨装配模块模型提出如下假设:
(1) 模型的零部件均作刚体考虑;
(2) 不考虑零部件之间的尺寸公差和自然误差;
(3) 动力学仿真按照在空间环境下进行,只考虑主动模块与被动模块,忽略地面试验装置——试验架,同时,不计重力加速度的影响;
(4) 机械臂抓持主动模块进行装配的动作简化为主动模块在模块接口方向上的力作用下进行装配。
4.2 模型设置
通过三维建模软件Pro/E建立整个在轨装配模块的三维模型并装配后,将其导入ADAMS仿真软件,将所有零部件材料属性均制定为铝,根据装配关系定义约束,并按表3设置弹簧参数。
4.3 仿真结果
仿真过程中,主要针对锁紧与释放2个功能进行仿真分析。一是在锁紧到位后,主动模块受150 N外力下死点结构是否可靠,能否完成自锁。二是释放工作时,SMA弹簧能否完成解锁动作。条件设置以及锁紧爪的旋转角度如图8~10所示。
从图10中可以看出,3个锁紧爪的展开性能虽有细微不同,但基本保持一致。在3.0 s时,锁紧爪进行锁紧并在0.1 s内完成锁紧。3.5 s时,装配所用的外力撤销时,受导引头上的阻尼簧作用,锁紧爪有回弹动作,随后保持稳定锁紧状态。在4.0 s时,对主动模块施加150 N的拉力,锁紧爪有轻微振动,但很快稳定,并保持自锁状态。6.0 s时,施加SMA弹簧力,锁紧爪在0.3 s时间内完成释放动作。
综上,该锁紧与释放机构的“死点”结构可靠,能够完成自锁。SMA弹簧参数准确,能够实现快速释放的动作。
5 结束语
根据模块化航天器中在轨装配技术的要求,本文以航天器结构机构设计为理论基础,参考国外在轨装配模块的典型结构,设计了一种锁紧释放机构,对所需的SMA弹簧进行了分析计算,得出SMA弹簧参数。再将虚拟样机进行了仿真分析,将所得的数据曲线与理论设计上的数据进行对比,结果高度一致,表明该模型的可靠性高,为原理样机的加工提供了可靠的理论依据,同时也为在轨装配技术提供了进一步的研究依据。
参考文献:
[1] 常显奇.军事航天学[M].北京:国防工业出版社,2002.
CHANG Xian-qi.Military Astronautics[M].Beijing: National Defense Industry Press,2002.
[2] 李传胪.新概念武器[M].北京:国防工业出版社,1999.
LI Chuan-lu.New Concept Weapon[M].Beijing: National Defense Industry Press,1999.
[3] 芦瑶.空间在轨装配技术发展历程研究[D].哈尔滨:哈尔滨工业大学,2011.
LU Yao.The Study of Space on-Orbit Assembly Technology[D].Harbin: Harbin Institute of Technology,2011.
[4] REYNERSON C M.Spacecraft Modular Architecture Design for on-Orbit Servicing[C]∥Proceedings of the Aerospace Conference Proceedings,IEEE,2000: 227-238.
[5] 陈小前,袁建平,姚雯,等.航天器在轨服务技术[M].北京:中国宇航出版社,2009.
CHEN Xiao-qian,YUAN Jian-ping,YAO Wen,et al.Spacecraft on-Orbit Service Technology[M].Beijing:China Astronautic Publishing House,2009.
[6] 郭继峰,王平,崔乃刚.大型空间结构在轨装配技术的发展[J].导弹与航天运载技术,2006(3):28-35.
GUO Ji-feng,WANG Ping,CUI Nai-gang.Development of on-Orbit Assembly of Large Space Structures[J].Missiles and Space Vehicles,2006(3):28-35.
[7] 庞羽佳,李志,陈新民,等.模块化可重构空间系统研究[J].航天器工程,2016(3):101-108.
PANG Yu-jia,LI Zhi,CHEN Xin-min,et al.Research on Modular Reconfigurable Space System[J].Spacecraft Engineering,2016(3):101-108.
[8] 邹惠君,傅祥志,张春林,等.机械原理[M].北京:高等教育出版社,1999:44-45.
ZOU Hui-jun,FU Xiang-zhi,ZHANG Chun-lin,et al.Mechanical Principle[M].Beijing:Higher Education Press,1999:44-45.
[9] 杨杰,吴月华.形状记忆合金及其应用[M].合肥:中国科学技术大学出版社,1993:209-222.
YANG Jie,WU Yue-hua.Shape Memory Alloys and Their Applications[M].Hefei:Press of University of Science and Technology of China,1993:209-222.
[10] 赵连城,蔡伟,郑玉峰.合金的形状记忆效应与超弹性[M].北京:国防工业出版社,2002:244.
ZHAO Lian-cheng,CAI Wei,ZHENG Yu-feng.Shape Memory Effect and Super Elasticity in Alloys[M].Beijing:National Defense Industry Press,2002:244.
[11] 童靖宇.空间冷焊效应及其防护技术研究[J].航天器环境工程,2000(1):39-45.
TONG Jing-yu.Space Cold Welding Effect and Its Avoidance[J].Spacecraft Environmental Engineering,2000(1):39-45.
[12] 张文钲,姚殳.二硫化钼制备与应用研究进展[J].润滑油,2006(4):19-24.
ZHANG Wen-zheng,YAO Shu.An Advance in the Research of Preparation and Application of Molybdenum Disulfide Lubricant[J].Lubricating Oil,2006(4):19-24.
[13] 舟久保,熙康.形状记忆合金[M].千东范,译.北京:机械工业出版社,1984.
ZHOU Jiu-bao,XI Kang.Shape Memory Alloy[M].QIAN Dong-fan,translated.Beijing:China Machine Press,1984.
[14] 范成建,熊光明,周明飞.虚拟样机软件MSC.ADAMS应用与提高[M].北京:机械工业出版社,2006.
FAN Cheng-jian,XIONG Guang-ming,ZHOU Ming-fei.Virtual Prototyping Software MSC.ADAMS Application and Improvement[M].Beijing:China Machine Press,2006.
[15] 王国强,张进平,马若丁.虚拟样机技术及其在ADAMS中的实践[M].西安:西北工业大学出版社,2002.
WANG Guo-qiang,ZHANG Jin-ping,MA Ruo-ding.Virtual Prototyping Technology and Its Practice in ADAMS[M].Xi′an:Northwestern Polytechnical University Press,2002.
