水稻钵苗膜上移栽机构优化设计与试验
2018-04-19刘志平周脉乐
刘志平 辛 亮 周脉乐 王 杰
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
水稻覆膜栽培技术具有提高地表温度,增加有效积温,减轻杂草和病虫害,增加有效穗数和有效防止水土流失等优点[1-4]。该项技术可以将有机水稻的种植趋于理想化,即解决了在不使用化学除草剂情况下种植有机水稻除草的难题[5]。水稻钵苗移栽技术,较传统插秧方式相比,具有不伤根、无缓苗期等优点,可以使秧苗低节位分蘖,增加有效分蘖,平均增产10%~20%[6-8]。综上所述,水稻钵苗移栽和覆膜栽植技术均是水稻种植的发展趋势,水稻钵苗膜上移栽将两种农艺结合,可以实现二者优势的叠加,达到有机水稻的优质高产,大幅度提高有机水稻种植的经济和生态效益。
目前,对于全自动水稻膜上移栽装备的研究较少,所见报道大多为单独进行覆膜、打孔、插秧的装备,同时也出现了水稻覆膜插秧一体机。日本的永田雅辉等[9-10]研制出一种水稻覆膜插秧机,可以实现破膜与插秧同步作业,但该机型并未实现大面积的推广使用。国内对于水稻覆膜打孔栽植装置的研制较少,由两套机构分别完成破膜与插秧动作,在实际作业中,很难保证秧苗正好插入穴口中,出现了伤根伤苗等现象[11-13]。水稻高速插秧机直接用秧爪破膜栽植,会对水稻的根系造成一定伤害,破膜与栽植质量均受影响[14]。水稻膜上机械化栽植均采用插秧方式,而将水稻钵苗移栽与破膜打孔栽植相结合的装备研究未见相关文献报道,该项农艺技术的机械化生产对于有机水稻的生产与后续研究具有重要的意义。
本文将帕斯卡蜗线齿轮[15-16]行星轮系与圆柱齿轮行星轮系相结合,提出一种同时满足膜上开孔与水稻钵苗移栽的移栽机构,并基于该机构开发优化设计软件,通过对机构的结构与设计优化,使得移栽机构的夹秧片实现水稻钵苗移栽所需的环扣形轨迹,破膜刀具随着圆柱齿轮的转动实现钵苗移栽前的破膜作业。由一套机构依次完成取苗、输送、破膜和栽植一系列动作,避免因破膜与水稻栽植不同步而造成的秧苗损伤问题。
1 移栽机构工作原理与轨迹分析
1.1 工作原理
移栽机构是水稻钵苗膜上移栽机的核心工作部件,机构的工作原理图如图1所示。该机构的传动部分由5个相互啮合的非圆齿轮和5个相互啮合的圆柱齿轮组成,由于两侧移栽臂的运动轨迹和姿态是相同的,因此仅对单侧移栽臂进行说明。其工作原理为:圆柱太阳轮、非圆太阳轮与机架固装,机构运转时保持相对静止状态。动力由动力输出轴传递给齿轮箱使其做匀速圆周运动。在齿轮箱的带动下,圆柱中间齿轮与圆柱行星齿轮绕齿轮箱做定轴转动,圆柱齿轮之间相互啮合,形成匀速转动的圆柱行星齿轮机构,驱动与行星轴固连的破膜刀具完成破膜运动。移栽臂在随齿轮箱体匀速转动的同时,相互啮合的非圆齿轮驱动移栽臂做不等速运动,两个运动的合成,形成了特定的水稻钵苗移栽轨迹与姿态。圆柱齿轮间的啮合作用使破膜刀具在圆周运动的过程中作平动,形成圆形的相对运动轨迹。

图1 移栽机构工作原理图Fig.1 Working principle diagram of transplanting mechanism1.动力输出轴 2.圆柱太阳轮 3.中间轴 4.圆柱中间轮 5.行星轴 6.圆柱行星轮 7.齿轮箱 8.破膜刀具 9.移栽臂 10.非圆行星轮 11.非圆中间轮 12.非圆太阳轮 13.机架
1.2 作业轨迹与姿态
保证水稻钵苗膜上移栽机构栽植质量的关键,是对移栽和破膜轨迹的形状与姿态进行优化设计。为了达到移栽要求,本文确定破膜刀具采用余摆线形状的绝对运动轨迹,移栽臂端部尖点采用环扣形的相对运动轨迹,并保证膜上开孔与钵苗移栽依次完成。
回转式移栽机构旋转一周所形成的环扣形相对运动轨迹如图2所示,通过模拟人工移栽水稻钵苗的动作,实现移栽过程。在初始位置时,夹秧片处于张开状态。机构按顺时针方向旋转,夹片在A点开始闭合夹紧。通过A点后,要完成钵苗从钵盘中取出且不能伤害钵苗的根部,需使秧苗沿着垂直钵盘方向且近似直线的AB段取出秧苗,拔出的距离应大于钵土的深度,避免钵苗与秧箱干涉损坏秧苗。BCDE段是秧苗的输送阶段,夹片一直处于夹持秧苗的状态,此过程中要保证夹片与所夹秧苗不与秧箱干涉。移栽机构在E点处完成推秧动作,实现钵苗的栽植过程。破膜刀具工作状态下形成余摆线形的轨迹如图3所示,能够达到破膜的作业效果,并可保证在移栽臂开始取秧时,刀具尖端远离钵盘,避免干涉。破膜和栽植依次完成,推秧机构将水稻钵苗强制弹入刀具所形成的穴口中。在EFC段(图2),夹片处于张开状态,移栽臂转到初始位置准备下一周期的栽植作业,回转体旋转一周,水稻秧苗栽植2次。
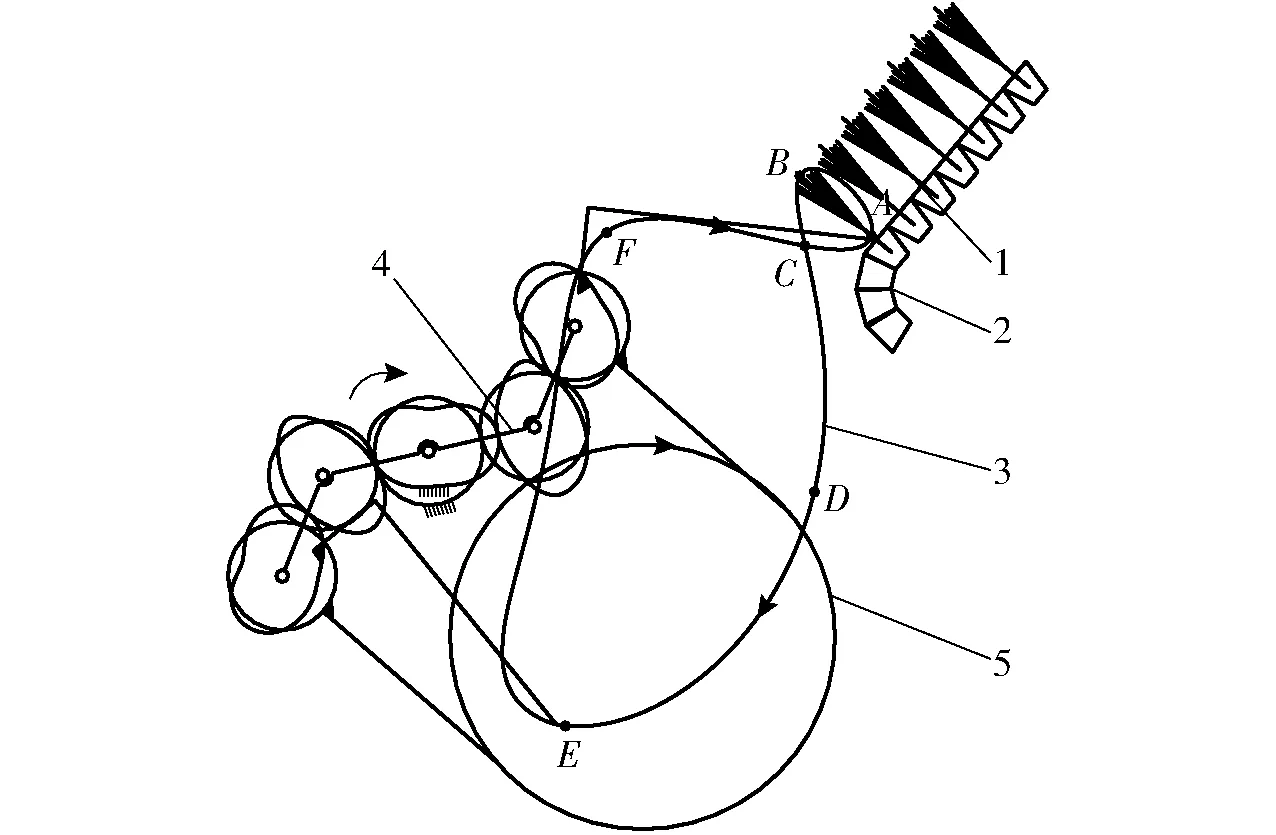
图2 移栽机构相对运动轨迹Fig.2 Relative motion trace of transplanting mechanism1.水稻钵苗 2.钵盘 3.移栽相对运动轨迹 4.移栽机构 5.破膜相对运动轨迹

图3 移栽机构绝对运动轨迹Fig.3 Absolute motion trace of transplanting mechanism1.移栽机构 2.移栽动轨迹 3.破膜动轨迹 4.地面
2 移栽机构运动学模型建立
以太阳轮转动中心O1为原点,水平方向为X轴,垂直方向为Y轴建立坐标系,机构简图如图4所示,具体建模过程如下:
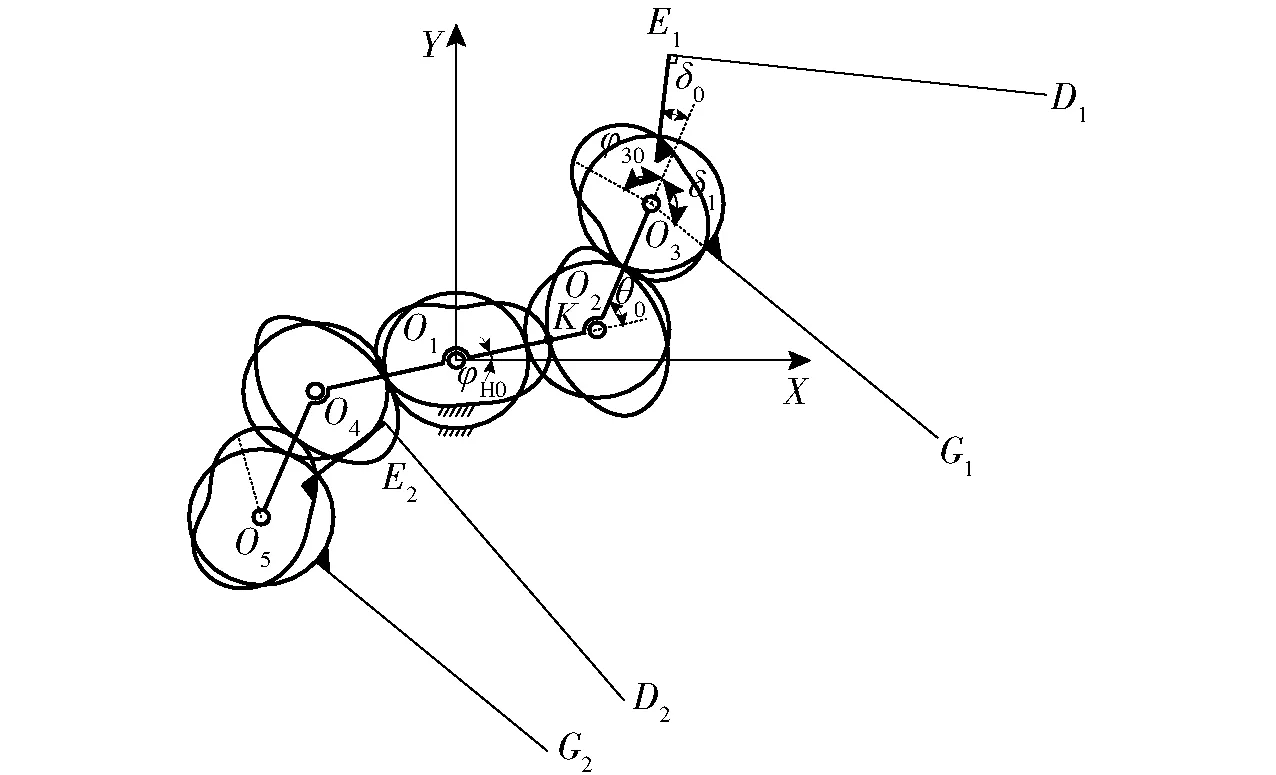
图4 移栽机构简图Fig.4 Transplanting mechanism diagram
在移栽机构转动的过程中,行星架与动力输出轴固连,做顺时针匀速转动。非圆太阳轮与非圆行星轮为完全相同的齿轮,K为非圆太阳轮与上非圆中间轮的啮合点。其中φH0表示行星架的初始安装角,βj(φ)为齿轮j相对行星架的转角,φj(φ)为齿轮j的绝对转角,规定行星架顺时针转动角度为负,逆时针转动角度为正。当行星架顺时针转过φ,则
行星架的绝对运动转角φH(φ)为
φH(φ)=φH0-φ
(1)
齿轮1(非圆太阳轮)相对行星架的转角和绝对转角分别为
(2)
齿轮2(上非圆中间轮)相对行星架的转角和绝对转角分别为
(3)
其中
r2(i)=a-r1(i)
(4)
式中r1(i)——非圆太阳轮转动中心与啮合点K的距离,mm
r2(i)——非圆中间轮转动中心与啮合点K的距离,mm
a——相互啮合的非圆齿轮中心距,mm
齿轮3(上非圆行星轮)相对行星架的转角和绝对转角分别为
(5)
(6)
式中φ30——行星架拐角所引起的非圆行星轮初始安装角,rad
θ0——行星架的拐角,rad
若β2(φ)=π+θ0,则φ30=φ。
齿轮4(下非圆中间轮)相对行星架的转角和绝对转角分别为
(7)
齿轮5(下非圆行星轮)相对行星架的转角和绝对转角分别为
(8)
由于5个圆柱齿轮半径均为a/2,因此圆柱齿轮间的传动比为1,圆柱行星轮在行星架圆周运动过程中作平动。
(xOj(φ),yOj(φ))表示齿轮j转动中心的坐标,则
(9)
(10)
(11)
(12)
(13)
(xEj(φ),yEj(φ))为移栽臂拐点Ej的坐标,则
(14)
(15)
式中lO3E1——非圆行星轮转动中心O3到移栽臂拐点E1的距离,mm
δ0——移栽臂的初始安装角,rad
(xDj(φ),yDj(φ))为移栽臂尖点Dj的坐标,则
(16)
(17)
式中lE1D1——移栽臂拐点E1到移栽臂尖点D1的距离,mm
(xGj(φ),yGj(φ))为破膜刀具尖点Gj的坐标,则
(18)
(19)
式中lO3G1——非圆行星轮转动中心O3到破膜刀具尖点G1的距离,mm
δ1——破膜刀具在初始安装位置与行星架的夹角,rad
3 计算机辅助优化设计软件开发
对于水稻钵苗膜上移栽机构的设计研究,采用传统的方法很难解决多目标且强耦合性优化难题。因此,本文基于理论分析与目标函数开发出移栽机构的优化设计软件,简化了设计过程、便于设计人员操作,大幅度缩短移栽机构的设计周期。
3.1 移栽机构优化目标确定
根据水稻钵苗膜上种植的农艺要求,需要确定移栽机构在栽植过程中所需满足的目标要求,目标的确立是评判优化参数是否符合要求的重要指标。在优化机构参数时[17-19],设立目标如下:①破膜穴口在35~65 mm之间。②移栽臂部件转动过程中互不干涉。③轨迹高度大于260 mm。④破膜孔与栽植的钵苗同穴。 ⑤取秧角介于-5°~15°之间。⑥推秧角介于45°~60°之间。⑦角度差介于40°~50°之间。⑧破膜刀具与异侧的移栽臂互不干涉。⑨齿轮箱运动最低点距地面大于15 mm。⑩同轴破膜刀具与移栽臂互不干涉。齿轮模数大于2.5 mm。夹持状态的钵苗在输送过程中不与秧盘干涉。取苗时,拔出钵苗的距离大于钵盘深度18 mm。
根据建立的运动学模型,通过Visual Basic 6.0汇编语言编写栽机构优化设计软件[20],其中主从动非圆轮的节曲线都是封闭的,满足齿轮做单向连续传动,以传递周期性的运动关系[21]。
3.2 移栽机构优化软件
圆柱齿轮行星轮系带动刀具完成破膜开孔的动作,非圆齿轮行星轮系带动移栽臂完成钵苗移栽的动作,破膜与栽植依次完成。本软件通过对移栽机构的结构尺寸、位置和运动状态的模拟,通过参数的调节以达到所设定的目标,实现对移栽机构的优化过程,优化软件界面如图5所示。
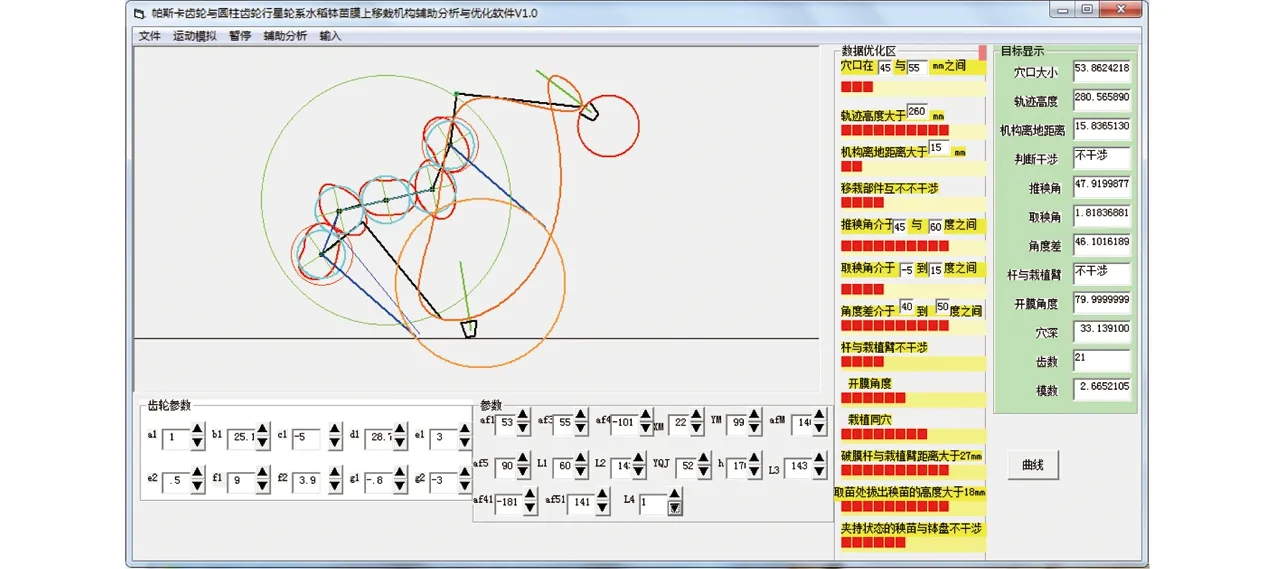
图5 计算机辅助优化设计软件界面Fig.5 Interface of computer aided optimization design software
应用计算机辅助优化设计软件,得到一组满足水稻钵苗膜上移栽农艺要求的机构参数。齿轮节曲线参数包括:a1=1,b1=25.1,c1=-5,d1=28.7,e1=3,e2=0.5,f1=9,f2=3.9,g1=-0.8,g2=-3。结构参数包括:移栽臂第1段长度l1=60 mm,移栽臂第2段长度l2=143 mm,破膜刀具长度l3=143 mm,秧箱中心横坐标xm=221 mm,秧箱中心纵坐标ym=99 mm,株距H=170 mm,行星架初始安装角φH0=53°,行星架拐角θ0=55°,移栽臂初始安装角δ0=-101°,移栽臂拐角φ1=90°,行星架整体转角φ2=140°,破膜刀具初始安装角δ1=-181°,秧箱倾角λ=52°。
4 物理样机验证试验
4.1 高速摄影试验
根据优化软件所得的参数对移栽机构进行结构设计,包括通过非圆节曲线参数设计非圆齿轮行星系结构,通过结构参数完成移栽臂和破膜刀的设计,并按照初始安装位置参数完成移栽机构的整体装配。利用CATIA软件建立机构的三维模型,将装配好的模型导入ADAMS软件中进行虚拟样机的运动仿真,移栽机构相对运动状态下的移栽与破膜轨迹如图6所示。
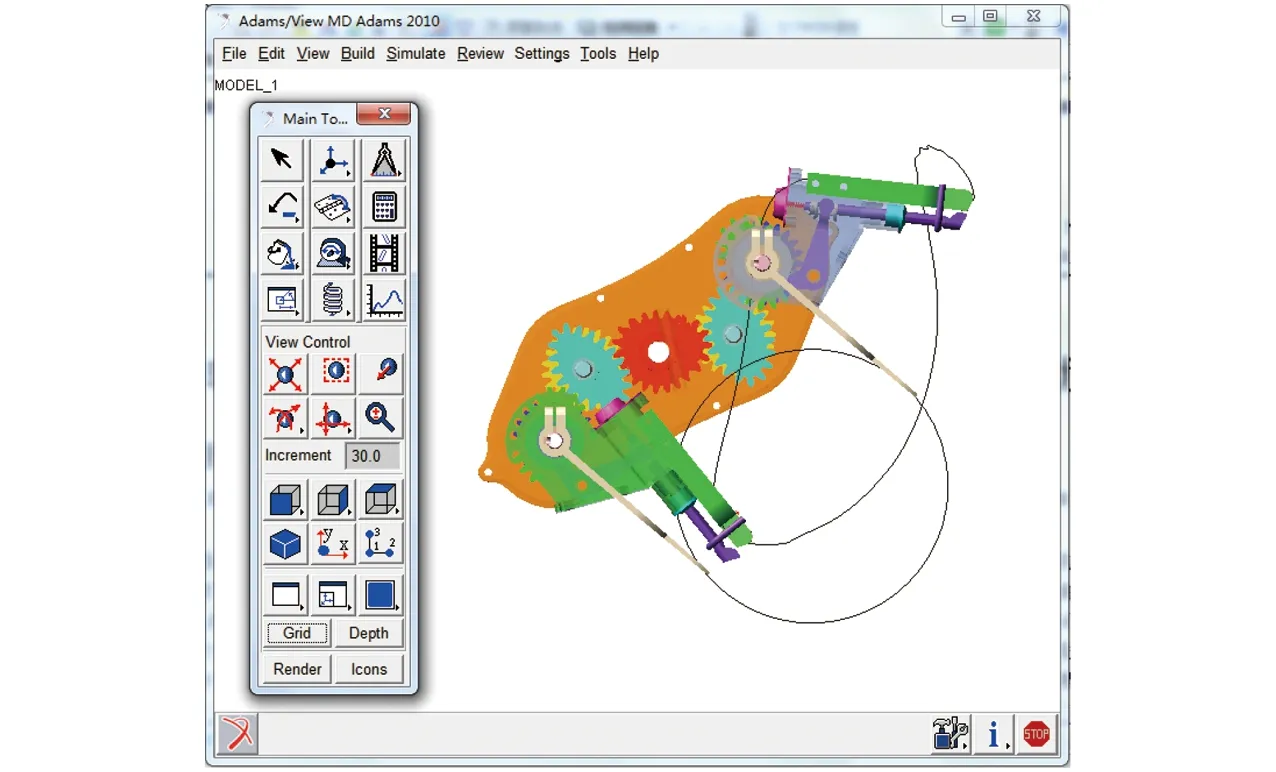
图6 虚拟仿真轨迹Fig.6 Virtual simulation trajectory
应用3D打印技术对回转式移栽机构的主要零部件进行加工并完成装配。大幅度缩短物理样机的加工与研制周期,不仅可以快速检验样机结构设计是否正确与合理,而且节约了复杂零部件的加工成本,为今后批量生产和开发模具奠定良好的研究基础。
移栽机构取苗与破膜相关零部件采用金属材质零件,将装配好的物理样机安装在课题组自主研发的移栽机构试验台架上[22]。设定机构转速100 r/min,试验选用东农425粳型常规水稻新种,利用高速摄影技术完成移栽机构的验证试验。试验中移栽机构各个关键位置的转角与姿态以及取苗结果如图7所示,机构转动一周完成两次取苗,推秧效果良好。移栽机构移栽臂尖点与破膜刀具尖点运转过程中的相对运动轨迹如图8所示。物理样机所得轨迹与优化设计软件、虚拟仿真结果基本一致,验证了移栽机构设计的正确性与合理性。

图8 移栽臂尖点与破膜刀具尖点的相对运动轨迹Fig.8 Relative motion trajectories of tip points of transplanting arm and broken film cutter
4.2 性能验证试验
水稻钵苗膜上移栽机构将水稻钵苗移栽与破膜打孔相结合,其关键在于移栽机构的取苗成功率以及破膜与栽植的配合效果,本文对移栽机构进行取苗试验以及膜上移栽的性能验证试验。
4.2.1取苗试验
取苗试验选用塑料软质钵盘育秧,水稻秧盘穴孔的顶部和底部均为正方形,钵盘穴口大小为20 mm×20 mm,底部尺寸为9 mm×9 mm,钵盘穴深为18 mm,钵盘横向和纵向穴数分别为14穴和29穴,并且横向和纵向相邻穴孔中心距离均为20 mm。试验设定移栽机构转速为100 r/min,共对3盘钵苗共1 218穴进行取苗试验。试验过程中,机构运转平稳,振动小,成功取出并完成推秧的钵苗共有1 130株,平均取苗成功率为92.8%,而未取出秧苗的主要原因包括育秧过程中钵苗之间的相互连根导致的空穴、秧根从秧盘底部窜出过多以及秧盘本身空穴或秧苗过少的情况等,整体取苗结果可以满足钵苗移栽的要求。
4.2.2膜上移栽试验
试验用地膜为0.02 mm塑料薄膜,将移栽机构安装在高速钵苗移栽机上,配合土槽实施移栽试验,试验采取正常作业模式,即土槽静止,整机向前运动作业,设定栽植速度与前进速度为定速比(株距为定值17 cm),如图9所示。将土槽内的土壤环境模拟稻田实际状态,土壤深度为10 cm,泡田时间24 h,水层深度控制在5 mm左右。移栽机构在100 r/min的转速下重复进行5组试验,每组试验选取速度稳定、株距均匀的10个膜孔进行测量。膜孔长度直接影响水稻生长以及除草、增温效果,水稻栽植到膜孔的同步效果将影响秧苗栽植质量与生长状况,故试验对膜孔长度进行测量,并选取水稻钵苗在膜上栽植的合格率为评价指标,计算公式为
(20)
式中Q——钵苗栽植合格率,%
w1——栽植合格数,个
w——总栽植数,个
其中移栽机构将水稻钵苗取出并配合破膜刀将所取钵苗栽植到膜孔中即为合格。

图9 膜上移栽试验装置Fig.9 Transplanting test device on film
试验结果如表1所示,实际测量的膜孔长度与设定的理论膜孔长度基本相符,但实际作业中破膜的深度有一定差异,因此造成穴口长度存在相应差异,但仍能满足作业要求;根据试验移栽与破膜的配合要求,对试验数据进行计算得到水稻钵苗膜上栽植的合格率为90%,满足机构设计和作业要求。
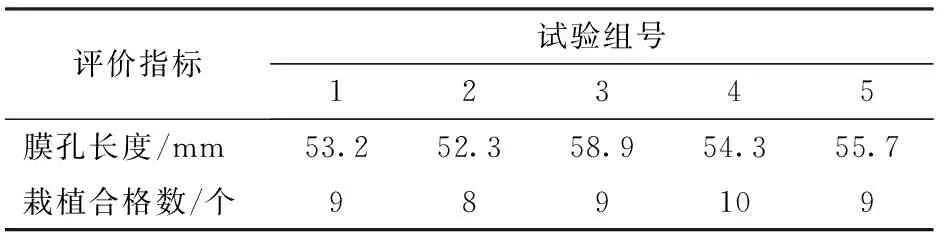
表1 试验结果Tab.1 Results of test
5 结论
(1)提出了一种水稻钵苗膜上移栽机构,可依次完成取苗、输送、破膜和栽植一系列动作,结构简单、成本低,有利于促进水稻钵苗移栽和膜上栽植技术相结合的推广应用,具有现实应用价值。
(2)基于VB6.0软件开发出移栽机构的优化设计软件,解决了移栽机构多目标、多参数、强耦合性的复杂优化难题,最终优化出一组较优的结构参数,满足移栽机构实现破膜和钵苗移栽的轨迹与姿态要求。
(3)建立机构虚拟样机,设计机构物理样机,开展机构虚拟运动仿真和高速摄像运动试验,试验结果与理论分析所得轨迹基本保持一致,验证了移栽机构设计的正确性。
(4)在试验台架上完成了移栽机构物理样机的取苗试验,在行星架转速为100 r/min下,平均取苗成功率为92.8%,水稻钵苗膜上栽植的合格率为90%。
1刘洋,张玉烛,王学华,等.水稻覆膜栽培研究现状与展望[J].湖南农业科学,2009(2):55-58.
LIU Yang, ZHANG Yuzhu, WANG Xuehua, et al. Status quo and prospect for film-covering cultivated rice [J]. Hunan Agricultural Sciences, 2009(2): 55-58. (in Chinese)
2张玉良.水稻覆膜机械装置的结构研究与设计[J].农业与技术, 2014(5):50-51.
3马维新,李如意,兰保国,等.有机水稻覆膜插秧技术研究[J].宁夏农林科技, 2013, 54(9):15-16.
MA Weixin, LI Ruyi, LAN Baoguo, et al.Preliminary experiment of film mulching transplanting technology for organic rice [J]. Ningxia Journal of Agriculture and Forestry Science and Technology, 2013, 54(9): 15-16.(in Chinese)
4任文涛,辛明金,林静,等.水稻纸膜覆盖种植技术节水控草效果的试验研究[J].农业工程学报, 2003, 19(6):60-63.
REN Wentao,XIN Mingjin,LIN Jing,et al.Experimental study on effect of paper-mulching rice planting technology on saving water and controlling weeds [J].Transactions of the CSAE, 2003, 19(6): 60-63. (in Chinese)
5牟雪雷,于磊,韩休海,等.有机水稻覆膜插秧技术研究[J].农业科技与装备, 2015(6):67-68.
MU Xuelei, YU Lei, HAN Xiuhai, et al.Study on the technique of organic rice mulching and transplanting [J].Agricultural Science & Technology and Equipment, 2015(6): 67-68. (in Chinese)
6于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J/OL].农业机械学报, 2014, 45(8):44-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu, ZHAO Yun, CHEN Baocheng,et al.Current situation and prospect of transplanter [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53. (in Chinese)
7XIN Liang, LÜ Zhijun, WANG Wenqing, et al. Optimal design and development of a double-crank potted rice seedling transplanting mechanism [J]. Transactions of the ASABE, 2017, 60(1): 31-40.
8俞高红,黄小艳,叶秉良,等.旋转式水稻钵苗移栽机构的机理分析与参数优化[J].农业工程学报, 2013,29(3):16-22.
YU Gaohong, HUANG Xiaoyan, YE Bingliang, et al.Principle analysis and parameters optimization of rotary rice pot seedling transplanting mechanism [J]. Transactions of the CSAE, 2013, 29(3): 16-22. (in Chinese)
9永田雅輝,日吉健二,梅崎輝尚,等. 早期水稲のマルチ栽培用田植機に関する基礎研究(第1報):ナイフ式マルチ穴開け機構の開発[J].農業機械学会誌, 1998, 60(1): 19-26.
10日吉健二,永田雅輝,梅崎輝尚,等. 早期水稲のマルチ栽培用田植機に関する基礎研究(第2報):ナイフ式マルチ穴開け機構の理論的解析[J]. 農業機械學會誌, 1998, 60(2): 11-18.
11王威.一种带有切膜刀组合的覆膜插秧一体机:201410339775.1[P].2014-07-17.
12陈海涛,赵阳,侯守印,等.同步膜上开孔插秧装置运动学仿真与参数优化试验[J].农业工程学报,2016,32(11):25-30.
CHEN Haitao,ZHAO Yang,HOU Shouyin,et al.Kinematics simulation and parameter optimization experiment for transplanting synchronous puncher [J]. Transactions of the CSAE, 2016, 32(11): 25-30. (in Chinese)
13张玉良.水稻节水机械自动覆膜装置的试验研究[D].长春:吉林农业大学, 2012.
ZHANG Yuliang.The experimental study of mechanical automatic filming device with saving water on rice [D]. Changchun: Jilin Agricultural University, 2012. (in Chinese)
14张子浩,陈海涛,顿国强,等.水稻插秧机植物纤维地膜敷设装置开口机构设计[J].农机化研究, 2015,37(3):79-82.
ZHANG Zihao,CHEN Haitao,DUN Guoqiang,et al.Optimal design of plant fiber film mulching device synchronous cutting mechanism on rice transplanter [J]. Journal of Agricultural Mechanization Research, 2015, 37(3): 79-82. (in Chinese)
15贲红艳,陈家寅.蜗线齿轮及其共轭齿轮节曲线的设计[J].燕山大学学报, 2012, 36(5):388-392.
BEN Hongyan, CHEN Jiayin. Design of pitch curves for limacon gear and conjugated gear [J].Journal of Yanshan University, 2012, 36(5): 388-392. (in Chinese)
16王国强,蔺文刚,赵云鹏.Pascal蜗线齿轮的设计研究[J].自动化与仪器仪表, 2016(6):87-89.
17赵匀.农业机械分析与综合[M].北京:机械工业出版社, 2009.
18瞿彬,王凤林.Visual Basic程序设计全程指南[M].北京:电子工业出版社, 2009.
19ZHOU Maile, SUN Liang, DU Xiaoqiang, et al.Optimal design and experiment of rice pot seedling transplanting mechanism with planetary Bezier gears [J].Transactions of the ASABE, 2014, 57(6), 1537-1548.
20陈建能,王英,黄前泽,等. 钵苗移栽机变形椭圆齿轮行星系植苗机构优化与试验[J/OL]. 农业机械学报, 2013, 44(10):52-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131009&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.10.009.
CHEN Jianneng, WANG Ying, HUANG Qianze, et al.Optimization and test of transplanting mechanism with planetary deformed elliptic gears for potted-seedling transplanter [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(10): 52-56. (in Chinese)
21陈建能,叶军,赵华成,等. 高阶变性偏心共轭非圆齿轮的凹凸性及根切判别[J]. 中国机械工程, 2014, 25(22): 3028-3033.
CHEN Jianneng, YE Jun, ZHAO Huacheng, et al.Concavity and tooth undercutting of high-order deformed eccentric conjugate non-circular gears [J]. China Mechanical Engineering, 2014, 25(22): 3028-3033. (in Chinese)
22宫成宇.多功能钵苗移栽试验台设计与试验研究[D].哈尔滨:东北农业大学, 2013.
GONG Chengyu.Test-bed design and experiment research on multi-function transplanting machine [D].Harbin:Northeast Agricultural University, 2013. (in Chinese)
