集装箱正面吊运机位置分析
2018-02-18康辉梅
龙 顺,康辉梅
(湖南师范大学工程与设计学院,湖南 长沙410081)
0 引言
集装箱正面吊运机采用了汽车起重机的伸缩式臂架结构,利用伸缩臂扩展作业范围,利用吊具装卸、搬运货物,具有起吊能力大、堆码层数高、机动灵活、堆场利用率高等优点。主要应用于集装箱港口、码头、铁路和公路中转站、堆场等集装箱的装卸、场地转运及堆垛作业[1]。
近年来,对于集装箱正面吊运机的研究主要集中在液压系统及其控制方面[2-4]和结构强度方面[5-7]。为了准确、稳定对箱、堆垛,有必要对集装箱正面吊运机的位置正解和反解进行分析。文献[8]基于ADAMS仿真平台对集装箱正面吊运机进行了位置反解仿真分析。本文基于复数矢量法建立集装箱正面吊运机的数学模型,求得解析解,进而利用Matlab软件进行工程实例仿真分析,最后利用ADAMS软件进行验证。
1 数学模型的建立
集装箱正面吊运机是一种空间开链机构,其机构示意图如图1所示,由二级伸缩式臂架系统和多功能吊具系统两部分组成,采用液压驱动方式。臂架系统包括基本臂和伸缩臂两部分,基本臂在俯仰液压油缸作用下绕O点转动,实现臂架系统的俯仰运动;伸缩臂安装在基本臂内,由臂架伸缩液压油缸驱动,实现臂架系统的前后伸缩运动。多功能吊具系统由基本梁和伸缩梁组成,整体安装在伸缩臂前端,基本梁在液压马达的作用下可绕伸缩臂在水平面内正反旋转,本文假设基本梁无偏转,即基本梁垂直于基本臂;伸缩梁在横梁伸缩液压油缸的驱动下可左右伸缩,调整吊具的开度。集装箱正面吊运机通过臂架系统的俯仰运动、前后伸缩运动和吊具系统的旋转运动的配合,实现对不同位置的集装箱的作业;通过吊具系统的左右伸缩运动实现对不同规格的集装箱的作业。

图1 集装箱正面吊运机机构示意图
1.1 位置正解
集装箱正面吊运机的位置正解是已知三个液压油缸的长度(S1、S2、S3),求解吊具系统末端的坐标(xI、yI、zI)和(xH、yH、zH)。为了获得吊具系统末端坐标的解析表达式,本文基于复数矢量法进行位置正解分析。
基本臂、俯仰液压油缸和机架一起构成一个封闭矢量多边形OABC,因此可建立矢量方程:

将式(1)表示为复数矢量形式为:

应用欧拉公式将上式实部和虚部分离、平方相加并整理化简可得:

式中:

基本臂、伸缩臂和机架构成一个封闭矢量多边形OADE,因此可得:

将式(4)表示为复数矢量形式为:

应用欧拉公式将式(5)右端的实部和虚部分离,可得:

综合式(3)和式(6)可知 E 点的绝对坐标值(xE,0,zE)。
由基本梁和伸缩梁构成的封闭矢量三角形EGI可得:

将式(7)表示为复数矢量形式为:

由此可以求得I点相对E点的坐标:

联立式(3)、(6)和(9)可求得 I点的绝对坐标值:

同理可得H点的绝对坐标值:

1.2 位置反解
集装箱正面吊运机的位置反解是给定吊具系统末端的坐标(xI、yI、zI),求解三个驱动液压油缸的长度(S1、S2、S3)。同理,本文基于复数矢量法进行位置反解的求解。
由基本梁和伸缩梁构成的封闭矢量三角形EGI创建封闭矢量方程:

将上述方程表示为复数矢量形式为:

根据式(13)和yE=0可求得:

进而求得E点的坐标如下:

由基本臂、伸缩臂和机架构成一个封闭矢量多边形OADE,建立封闭矢量方程:

将式(16)表示为复数矢量形式为:

求解上式可得:

式中:A2=xEcosβ1-zEsinβ1
式中:

由基本臂、俯仰液压油缸和机架一起构成的封闭矢量多边形OABC,可建立封闭矢量方程:

将上述方程表示为复数矢量形式为:

求解上式可得:

式中:

2 算例分析
以某集装箱正面吊运机为研究对象,在Matlab中进行算例分析。主要参数设定为:lOA=215 mm,lAB=570mm,lOC=1001mm,lDE=617mm,lGI=468 mm,S1=878 mm,S2=2 645 mm,S3=1 124 mm,杆件之间的夹角设定如下:β1=90°,β2=140°,β3=80°.设定各液压油缸的运动范围如下:S1为878~1 198 mm;S2为2 600~3 496 mm;S3为1 124~1 444 mm.根据前文求得的位置正解的数学模型,在Matlab中编写程序,得到集装箱正面吊运机的工作空间如图2所示。该工作空间展示的是以基本臂和机架的铰点O为参考点的末端执行装置I点的可运动范围,I点在X轴方向的运动受S1和S2共同作用,其范围为2 536~3 410 mm,且运动的过程为非线性递增规律;在Y轴方向的运动受S3的作用,其范围为1 124~1 444 mm,且运动的过程为线性递增规律;在Z轴方向的运动受S1的作用,其范围为-872~998 mm,且运动的过程为非线性递增规律。

图2 集装箱正面吊运机的工作空间
在实际作业过程中,为防止集装箱的振动、摇摆等不利因素,集装箱正面吊运机应能匀速垂直起吊,即要求I点相对于O点而言X、Y方向不变,沿Z轴方向匀速运动。设定I点沿Z轴方向的移动速度为0.15 m/s,利用前文求得的位置反解数学模型在Matlab中编写程序可以得到俯仰液压油缸和伸缩液压油缸的长度变化曲线分别如图3和图4所示。两个液压油缸的长度均不断增长且均呈非线性变化规律,其中俯仰液压油缸的变化相对比较缓慢,而臂架伸缩液压油缸长度的变化越来越快。

图3 俯仰液压油缸的长度变化曲线

图4 臂架伸缩液压油缸的长度变化曲线
3 ADAMS验证
在SOLIDWORKS中建立了集装箱正面吊运机的三维模型后,将其保存为*.x_t格式后导入至ADAMS软件,进而建立集装箱正面吊运机的运动学仿真模型并对其进行运动仿真。
为验证垂直起吊时俯仰液压油缸和伸缩液压油缸长度变化曲线的正确性,在ADAMS中进行仿真。在E点创建一个竖直向上的直线运动,满足起吊速度为0.15 m/s的要求,得到俯仰液压油缸和伸缩液压油缸的长度S1和S2的变化曲线,如图5所示。为了对比,将由本文所建数学模型而得的俯仰液压油缸和伸缩液压油缸的长度S1和S2的变化曲线也表示在图5中。
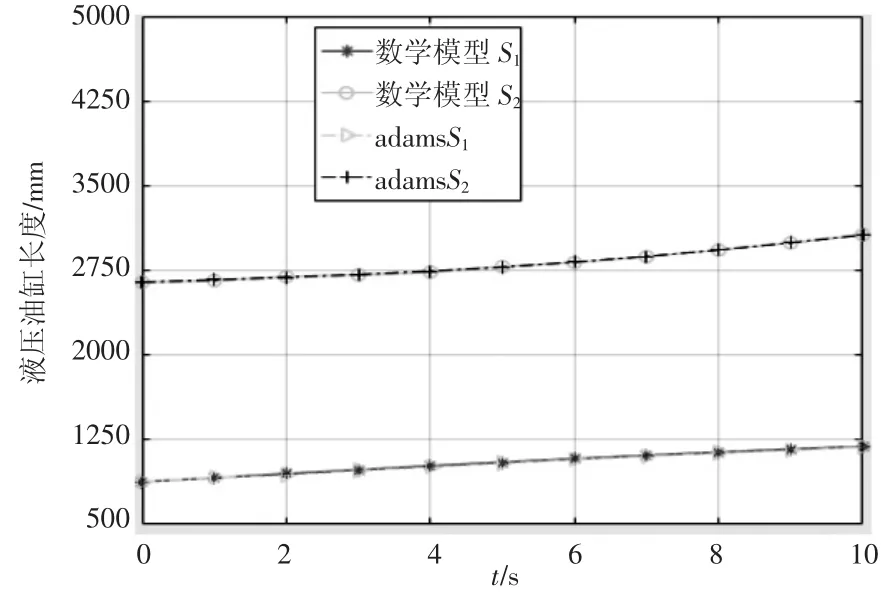
图5 S1和S2长度变化对比曲线
对比图5中的4条直线可知,ADAMS仿真得出的两个液压油缸的长度变化曲线与所建数学模型的长度变化曲线一致,验证了所建数学模型的正确性。
4 结论
(1)基于复数矢量法,建立了集装箱正面吊运机的数学模型,为位置分析提供了理论依据。
(2)基于数学模型对集装箱正面吊运机进行了位置正反解的分析,并且利用Matlab仿真分析了该机构的工作空间和匀速垂直起吊时俯仰液压油缸和伸缩液压油缸的长度变化规律。
(3)位置分析结果对该机构的运动学分析和自动控制研究等具有重要参考价值。
