未知环境下单目视觉移动机器人路径规划
2018-02-07郑争光任小洪程亚军常政威
郑争光,任小洪,2,程亚军,常政威
1.四川理工学院 自动化与信息工程学院,四川 自贡 643000
2.人工智能四川省重点实验室,四川 自贡 643000
3.四川电力科学研究院,成都 610072
1 引言
随着单目视觉在自主移动机器人上的广泛应用,对单目视觉测量和感知能力的提高,有助于提升移动机器人智能化水平。因此对单目视觉的研究和应用不断增多[1-12],文献[1]给出了一种基于单目视觉的避障算法,通过边缘算子检测图像中的障碍物与地面交线边缘,并提取图像中垂线和中间水平线的边缘像素位置,输入自适应的模糊推理系统训练,输出控制机器人进行避障;算法仅用中垂线和中间水平线的边缘像素位置代替障碍物,信息量有限,不易规划最优路径。文献[2-4]中的单目视觉的移动机器人避障导航方法,通过图像空间变换、边缘检测和坐标变换,利用模糊逻辑得出控制参数;但它们的单目测量方法中相机安装不够合理,视野覆盖到地平面以上,而地平面以上的图像,无法通过几何映射求取距离,不利于图像信息的有效利用;另外其计算方法不够精确,误差相对较大。文献[5]利用运动的单目相机中的图像序列,进行特征匹配,求解障碍物距离,从而实现避障和导航;然而图像的清晰度会受到运动相机的影响,这会对机器人通过图像特征匹配求解距离产生不利影响;而且图像序列特征匹配计算量比较大。文献[6]介绍了单目视觉的基本场景并改进了的人工势场算法,解决了传统人工势场法中目标点不可到达的问题,但没有给出二者结合应用的算法。
针对以上应用中的问题,通过改进测距映射计算方法,提高计算精度;并通过改进的单目测距方法绘制局部地图,再由改进的人工势场法实现局部路径规划,以便让机器人能够在未知环境中顺利到达目标点。
2 测距与局部地图绘建
2.1 障碍物及其轮廓检测
假设环境约束条件[7]:(1)机器人初始位置处没有障碍物;(2)地面平整;(3)没有悬挂障碍物;这些假设对于普通室内的未知环境是普遍存在的。
采集实验室环境图像,由于受到影响和干扰,需对图像进行预处理。主要涉及图像滤波,阈值分割,开运算和闭运算,区域生长等,以实现未知环境中障碍物及其边线的准确提取[8]。
首先对采集的彩色图像进行灰度化,既不失图像细节特征还加快了运算速度。之后对灰度图像中值滤波,在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制。其功能是让与周围像素灰度差较大的像素改变,并取与周围像素相近的值,消除孤立点;该方法既能去除脉冲噪声和椒盐噪声又能保留图像的边缘细节。采集的彩色图像如图1,灰度图像中值滤波如图2。

图1 原图

图2 灰度图像中值滤波
在目标灰度图像滤波后,采用最大类间方差法进行阈值分割,以得到环境的二值图像。最大类间方差法是根据图像灰度特性,计算以每个灰度值为阈值分割的类间方差,类间方差最大的分割即意味着错分概率最小,且类间方差的最大值即为阈值,自适应阈值分割结果如图3所示。

图3 自适应阈值分割
再通过开运算和闭运算,减少地板纹理的干扰,且可以平滑目标物边界同时不明显改变其面积,处理结果如图4所示。通过选择合适种子点对地面进行区域生长[8],可以减少不必要的连通区域及其边缘线的干扰,区域生长如图5所示。

图4 开运算、闭运算结果

图5 区域生长
对图5提取边缘,边缘图像中的独立连通域代表障碍物,轮廓线的外围和上方区域表示不可行驶区域,轮廓线内侧和下方表示可行驶区域。为了能够方便地在地图中表示障碍物,从边缘曲线中提取角点,处理结果如图6所示。这样可以减少地图创建的数据量又具有足够的环境特征,方便进行路径规划。
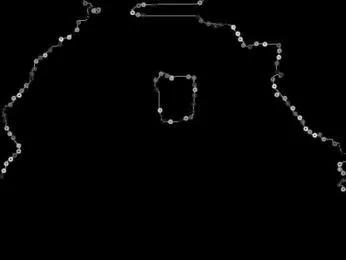
图6 障碍物轮廓中的角点提取
2.2 单目视觉测距方法改进
常用的单目视觉距离测量方法有:标定相机对已知物体的测距[9],基于动态单目视觉的测距[5],相机焦距与图像锐度关系的测距,基于空间几何约束的单目视觉测距[10-11]。标定的相机焦距固定,视野清晰范围有限,且只对已知尺寸的物体有效。动态单目视觉测距依据同一特征点在两幅图像中成像位置的变化,结合CCD自身运动参数,可算出机器人与目标之间的距离,但存在计算复杂,精确匹配难度大等缺点。利用相机焦距与图像锐度关系测距,由于常用单目相机焦距很难实时求解,因此该方法还不易广泛应用。应用最多的是空间几何约束单目视觉测距方法,该方法运算量小、实时性好,但不够精确简洁,误差较大。
为减小单目测距系统误差和计算复杂度,实现图像像素坐标与视野平面准确映射。对空间几何约束单目视觉测距方法作如下改进,CCD安装如图7所示,保证了全部视野与地平面相交,以提高图像的应用效率。定义b为相机安装俯视角,且tanb=Y1/H,2a表示相机Y轴方向上的视野角,且,Y1和Y2为相机Y轴方向上的最近点和最远点,可由实验求得。Sy为图片Y轴方向上的像素总数,Sx为图片X轴方向上的像素总数。目标点P在图像中的成像点P'的像素坐标(PX,PY),这样可以由图像坐标直接进行变换,不需要在图像中重新定义坐标原点。
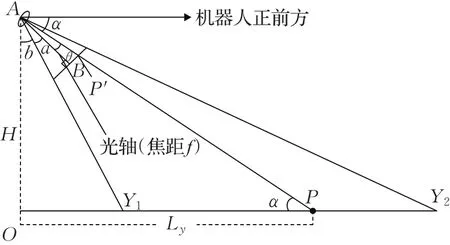
图7 单目视觉测距方法正视图
根据相机的成像原理及Y轴方向的像素与α角的一一对应关系,在直角ΔABP'中,∠BAP'=θ,θ随点P'变化而变化的关系为:

上式较文献[4]更精确表示了θ随像素变化的关系,dy表示单位像素所占的实际尺寸,将式(1)比式(2)得如下关系:
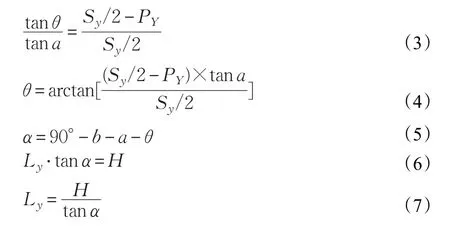
Ly则是所求目标点与机器人行驶方向上的距离。
γ是摄像机最大水平视角在地面上的投影与光轴投影的夹角(通过实验测量可以得到),β表示OP与光轴投影OY的水平夹角,而Lx则是所求障碍物与机器人之间X轴方向的距离。
Lx为障碍物在垂直于机器人前进方向上的距离,在图8表示为上正下负。
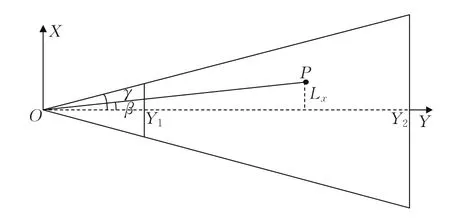
图8 单目视觉距离测量方法俯视图
2.3 局部地图绘建
在机器人坐标系中,障碍物特征角点坐标为(Lx,Ly);为方便路径规划,将所有点平移至X正半轴,选择世界坐标系绘制了视觉场景中的二维地图,比例尺度为1∶40(cm),局部地图如图9所示。
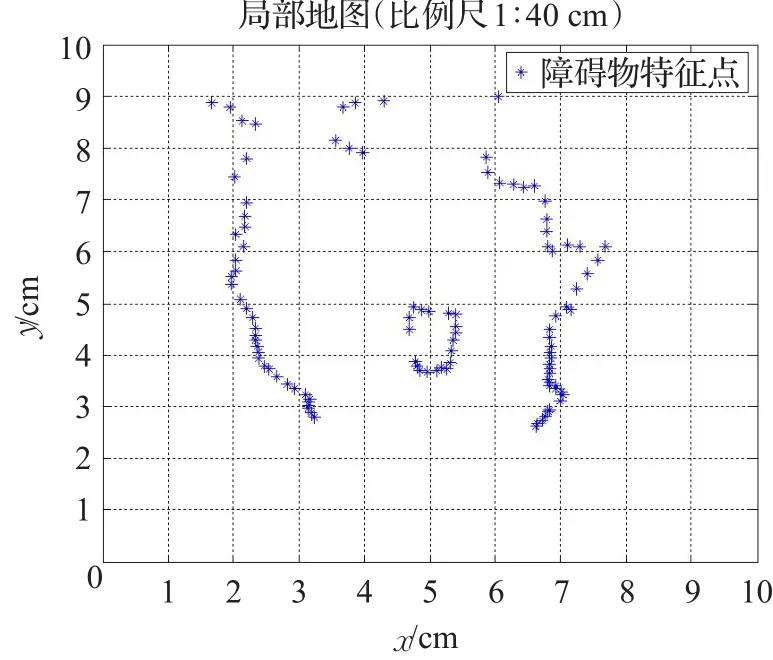
图9 视觉场景中的地图创建
3 改进人工势场的路径规划
人工势场法的主要思想[7,12]为:在机器人所在的环境中创建一个目标点引力场和障碍物斥力场共同作用的人工势场,通过搜索势函数的下降方向来确定可行路径。首先在机器人的运动环境中创建一个人工势场,包括两部分:引力场,目标点对机器人产生一定的引力,引力的方向指向目标点,nrg表示其单位矢量;斥力场,室内障碍物对机器人产生一定的斥力,斥力指向远离障碍物方向,nor表示其单位矢量。机器人通过这种合力来控制运动,沿着合成的人工势场力方向,避开障碍物,直至运动到目标点。它既可用于环境己知的全局路径规划,也可用于环境未知的局部路径规划。与栅格法相比,它不需要对环境进行复杂的建模,在简单的直角坐标系下就可应用。其不足在于存在局部最优解,因而可能使移动机器人在到达目标点之前就停留在局部最优点。
把移动机器人简化为一定比例的圆圈,它的运动空间为二维的。机器人在运动空间中任意位置t=[x,y]T,目标位置tg=[xg,yg]T。机器人的移动方向由障碍物的斥力场和目标点的引力场共同合成的总场强的方向指定。其中引力势场函数为:


该力随机器人趋近目标而呈线性趋近于零。经常使用的斥力场函数:
α为斥力增益系数,Φo为障碍物表面的斥力的影响距离,to为距离机器人最近的障碍物的坐标,Φ( )t,to为当前机器人位置t到障碍物表面最近的距离。
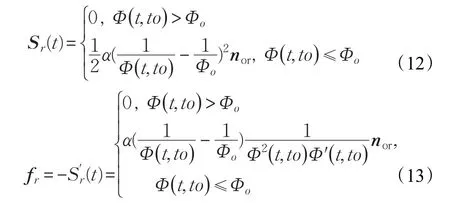
根据存在的问题,对人工势场法中的斥力场函数进行改进[13-15],当机器人接近目的地附近时,引力场的引力变得越来越小,若目标物附近存在障碍物,人工势场中目标附近的斥力增大,不利于机器人达到目标处。对斥力进行改进,人工势场斥力函数表达式为:
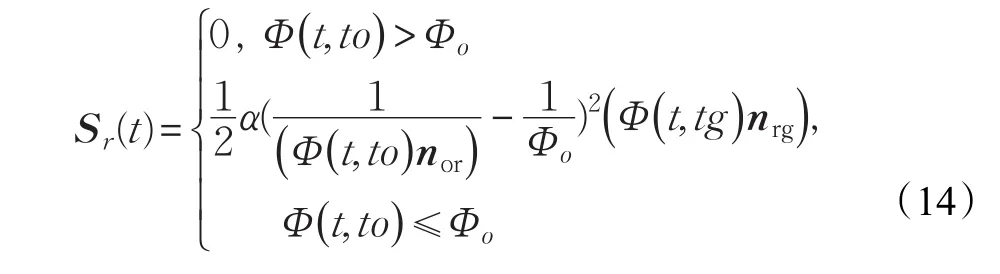
即使目标在障碍物的斥力影响范围内,能够根据机器人相对障碍物和目标的距离,使斥力随机器人到目标的距离而减小,使机器人可以到达目标处,斥力分量fr1和fr2的大小表示如下。

人工势场三维示意图如图10。
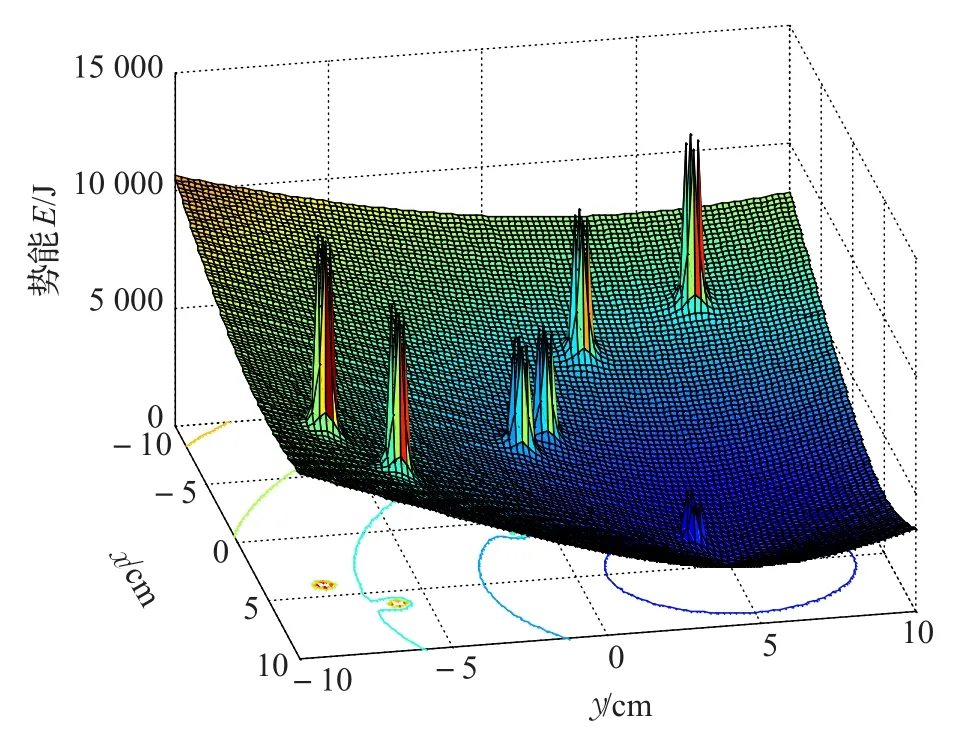
图10 人工势场三维示意图
通过MATLAB仿真实验,证明这种方法可以解决机器人最终目标路径规划问题。假设机器人在地图中的坐标,起始点(4.3,0),目标点(5.5,7);引力增益系数ξ=25,斥力增益系数α=6,实际的斥力影响半径Φo=0.2 m,规划路径距离:D=2.92 m,如图11。
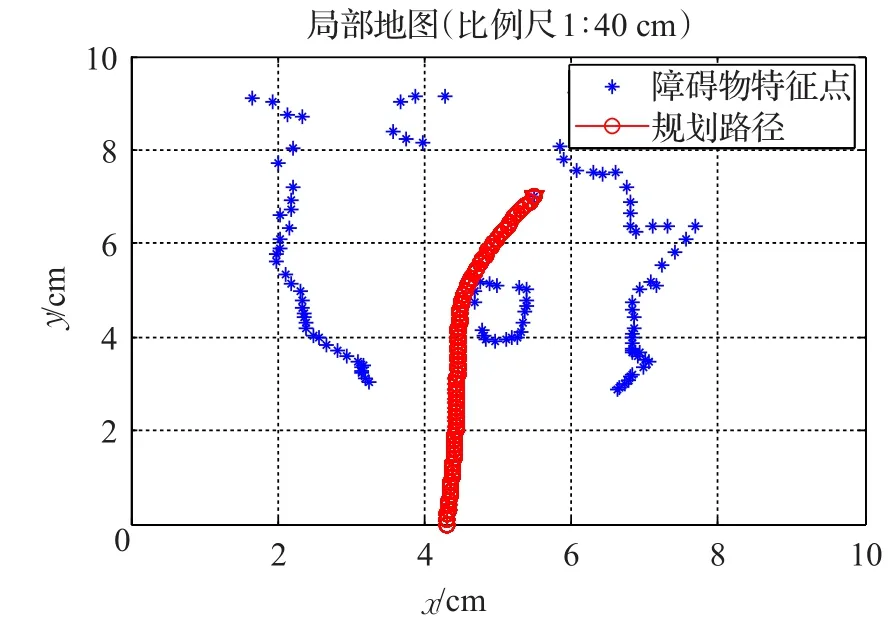
图11 局部路径规划
4 结束语
通过对室内未知环境特征分析,实现了障碍物及其轮廓的检测,应用改进的距离测量方法绘建局部地图,及改进的人工势场路径规划算法规划路径。通过仿真实验证明,该算法可以用于单目移动机器人在室内未知静态环境下的局部路径规划。但算法并不能对环境中动态障碍物位置进行精确预测,且障碍物的上部轮廓同样会被映射到地图中,被机器人误认为存在障碍物,对路径规划产生一定影响。为进一步完善算法,将会继续研究和分析障碍物特征,以便应用于全局地图绘建和导航。
[1]Mon Y J.Vision-based obstacle avoidance controller design for mobile robot by using single camera[J].International Journal of Computer Science Issues,2013.
[2]李庆,郑力新,潘书万,等.使用单目视觉的移动机器人导航方法[J].计算机工程与应用,2017,53(4):223-227.
[3]王伟,熊庆宇,王楷.面向室内未知环境的无障碍物区域单目视觉检测算法研究[C]//中国电子学会、中国振动工程学会.2010振动与噪声测试峰会论文集,2010:5.
[4]战强,吴佳.未知环境下移动机器人单目视觉导航算法[J].北京航空航天大学学报,2008,34(6):613-617.
[5]Lee T J L,Yi D H,Cho D I.A monocular vision sensorbased obstacle detection algorithm for autonomous robots[J].Sensors,2016,16(3):311.
[6]陈祥章.基于单目视觉的机器人人工势场法路径规划研究[J].南京师大学报:自然科学版,2014,37(1):61-65.
[7]Siegwart R,Nourbakhsh I R.自主移动机器人导论[M].2版.李人厚,宋青松,译.西安:西安交通大学出版社,2013.
[8]陈易婷.基于单目视觉的移动智能机器人的导航定位技术的研究和应用[D].成都:电子科技大学,2016.
[9]林剑冰,苏成悦,郑俊波,等.机器视觉导引的室内自动运输车定位系统[J].机械科学与技术,2015,34(11):1675-1681.
[10]李惠光,李金超,李国友,等.双向型单目视觉自动导引车路径识别及测量[J].计算机工程与应用,2015,51(8):260-265.
[11]吴刚,唐振民.单目式自主机器人视觉导航中的测距研究[J].机器人,2010,32(6):828-832.
[12]单宝明,周培培.基于改进人工势场法的机器人路径规划研究[J].信息技术,2014(1):170-173.
[13]王超,朱大奇.基于人工势场与速度合成的AUV路径规划[J].控制工程,2015,22(3):418-424.
[14]Luo Nengqiang,Liu Li,Gong Dongying,et al.Study on robot path planning based on an improved artificial potential field method[J].通讯和计算机:中英文版,2013(10):1360-1363.
[15]Ni Tianwei,Jiang Hong,Lin Jinzhu,et al.An anti-collision path planning algorithm based on improved artificial potential field method for mobile robot[J].Journal of Changzhou University:Natural Science Edition,2016(5).
