收获期花椒的力学特性与形态特征测定与分析
2017-12-16冯亚利孙世鹏傅隆生
冯亚利,彭 俊,孙世鹏,傅隆生
(西北农林科技大学 机电学院,陕西 杨凌 712100)
收获期花椒的力学特性与形态特征测定与分析
冯亚利,彭 俊,孙世鹏,傅隆生
(西北农林科技大学 机电学院,陕西 杨凌 712100)
我国花椒的收获主要以人工收获为主。随着社会的发展,花椒市场需求不断扩大,迫切需要解决花椒收获效率低下的问题。因此,花椒收获机械化已成为椒农的心声,研究分析收获期花椒的力学特性可以为花椒收获机械的设计者提供必须的基础理论数据。因花椒在品种、气候条件、土壤及其他方面的差异,其力学特性会有较大的差别。为此,通过陕西省韩城市收获期花椒的实验室测定,采用图像解析和数理统计方法对收获期花椒的力学特性进行分析,得出了花椒主要几何特性指标值的变化区间,并统计分析了花椒果实与果柄及果柄与树枝之间的分离力以及花椒果实的颜色特征,为花椒的收获和加工机器系统的开发提供科学依据。
花椒;力学特性;颜色特征;分离力
0 引言
花椒(Zanthoxylum L.)属芸香科(Rutaceae)植物,原产我国,作为一种广泛种植的经济作物,主要种植在山坡、丘陵、地头和岸边[1]。在古代,花椒常用作香料,随身配带。花椒也可用作建筑材料,“椒房”就是用花椒渗入涂料糊在墙壁上面建成。花椒还作为防腐剂,用来保存尸体。花椒用作中药有杀虫、麻醉、止痛等作用。花椒最主要的用途是作为香辛料,用于多种食品的烹调加工调味之中,具有赋香、着色、掩盖异味、防腐、保健及增加食欲等作用[2]。我国早在春秋时期就开始利用花椒的果实和嫩叶作调味品[3],因此花椒果实具有很高的食用和药用价值,同时花椒树也是干旱半干旱地区重要的水土保持树种[4]。我国从汉朝开始栽培花椒,花椒栽培面积于2008年达到167万hm2,年产花椒20~40万t,年产值30亿元[5]。目前,我国正以每年20%~30%的速度增加种植面积,花椒产业已成为特殊区域农民致富新的经济增长点。
目前,虽然出现了一些采收方法,但都不同程度地存在一些问题,因此人工采摘仍是当前采收的主要方法。因人工采摘周期长及成熟花椒易脱落等,大大影响了农民的经济利益[6]。因此,花椒收获机械全自动化已成为椒农的心声,采用收获机械进行采收的过程中,果实与果柄或果柄与树枝间的分离力大小是决定收获效率的重要因素之一。为了更好地选择林果收获机械设计方案及确立设计参数,国外在研究林果收获机械的同时对林果物理学和生物学特性与其分离力之间的关系进行了大量的研究[7-9]。目前,中国从事林果机械化收获及其相关方面的研究较少,对林果分离力的研究尚处于起步阶段。国内研究人员对水稻[10]、加工番茄[11]和猕猴桃[12-13]等果实分离力进行了分析研究。花椒因其树枝伸展长、带刺以及果实小,采摘十分困难。同时,花椒收获农艺要求很高,既要不伤叶、不伤芽、不伤枝,又要适时收获[14]。国内学者对花椒的机械化采收装置的开发利用进行了初步的探索,而关于花椒收获期力学特性和形态特性的研究却未见报道。本文通过测量花椒果实与果柄及果柄与树枝之间的分离力,以及花椒的物料与几何特性等,以期为花椒采收和加工装置的进一步研究开发提供参考。
1 材料与方法
1.1 材料
花椒品种为陕西省广泛种植的大红袍,样品取自陕西省韩城市,该地区的大红袍花椒占据了全国近1/6的花椒市场。选择3棵已进入生长稳定期的花椒树,在2015年的采摘期8月20日从3棵树上分别取30个花椒样本,将其从1~30按顺序分别贴标签,每个样本包括果实、果柄和树枝。
1.2 主要实验仪器与软件
自制式分离力测量系统、万分之一电子天平、数码相机,以及MatLab软件。
1.3 方法
1.3.1 花椒果实与果柄及果柄与树枝之间的分离力的测量
花椒样本的分离力由自制式分离力测量系统测量,包括数显式推拉力计SH-10(分辨率0.005N)、夹具和手压机架等。研究表明:施加在果柄上力的方向与通过果蒂的轴线方向的夹角越大,果实的分离力越小,所以测量的分离力夹角为0°时,果柄与果实的轴向拉力。测量果实-果柄分离力时将果实固定,通过夹具把果柄夹紧,匀速转动升降手柄直至果实果柄分离,记录果柄断裂时拉力的峰值。测量树枝-果柄的分离力时将树枝固定,通过夹具把果柄夹紧,匀速转动升降手柄直至果柄与树枝分离,记录果柄断裂时拉力的峰值。分离测量平台示意图如图1所示。
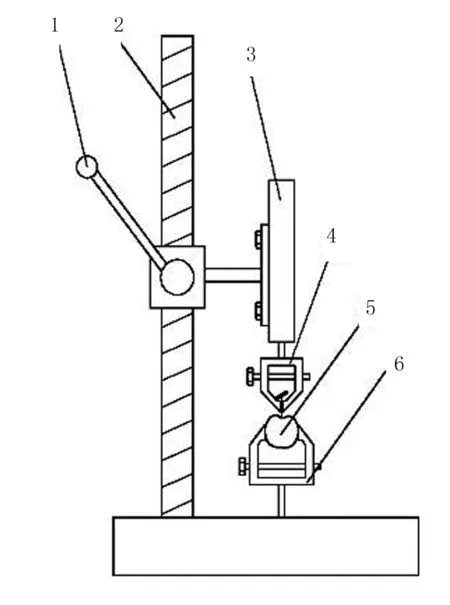
1.旋转手柄 2.手压机架 3.推拉力计 4.上夹具
1.3.2 花椒果实的颜色分析及物理特性测定
用万分之一电子天平测量选取的30个花椒样本
的质量,再采用图像处理方法(MatLab)测量花椒的颜色、尺寸和面积等指标。
在成像系统内,把花椒放置在坐标纸上,采用数码相机(Canon EOS 40D)拍照。相机设置:M挡、1/125S、F8.0、镜头55,镜头距坐标纸20cm。将拍摄的图片利用MatLab软件分别得出花椒果实的面积、长、宽、高的像素和R、G、B、H、S、V、L*、a*、b*的值。
利用图像处理的方法进行花椒图片分析,首先要将各花椒果实的彩色图像的RGB(红、绿、蓝)转换为一个灰度。换算公式为
gray=0.299R+0.587G+0.114B
(1)
其中,灰色(gray)代表从黑色(0)到白色(255)的256种深浅不同的灰色色调,而红、绿、蓝三原色的RGB空间的值域范围也是从0~255。
然后,使用阈值技术,选取相应的灰度图像区域将其转换为一个0或255的黑白图像。即如果灰度图像小于阈值则转换为0(黑色),高于阈值转换为255(白色),使每个花椒果实产生黑白图像,如图2(b)所示。采用大津法确定阈值[15]。接着,通过图2(a)与图2(b)相乘得到图2(c)。通过这种方法获得花椒果实区域,利用新图像计算果实的几何尺寸。
分割后,采用最小外接矩形的方法,通过找到白色区域的水平轴和垂直轴的最小值和最大值来计算果实长度和宽度[16];然后,用长度像素数(PL)和宽度像素数(PW)的最小外接矩形来计算果实长度(L,mm)和宽度(W,mm)。通过二值图像中计算白色像素的数目可得到的花椒果实的投影面积(PPA)的像素数和估算花椒果实投影面积(PA,mm2)。最后,所测得的实际尺寸为所得像素数目比上N(1mm×1mm坐标纸上最小正方形的像素数)具体计算为
L=PL/N1/2
(2)
W=PW/N1/2
(3)
PA=PAA/N
(4)
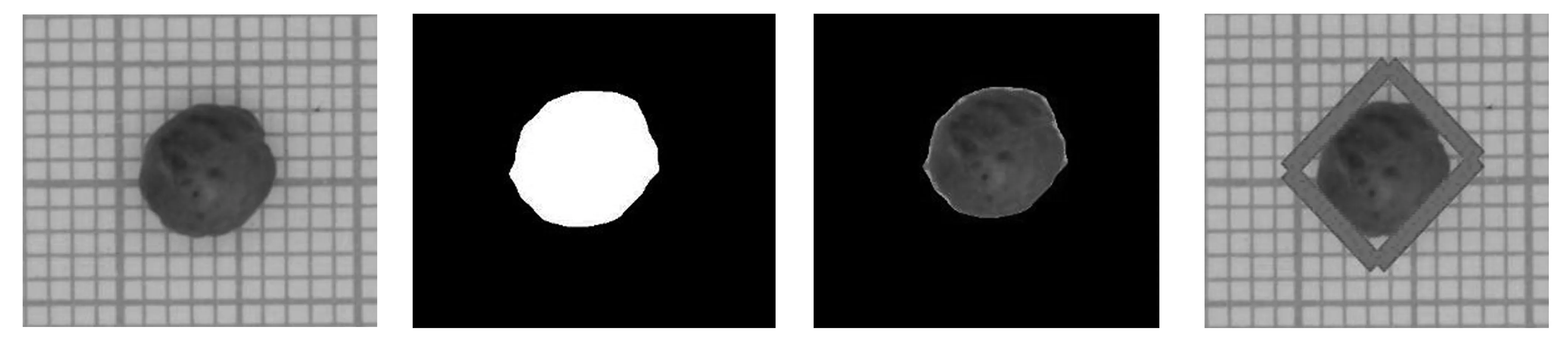
(a) 原始RGB彩色图像 (b) 使用阈值技术后的 (c) 图a与图b的乘法图像 (d) 利用最小外接矩形计算
软件所测量的R值、G值、B值代表红、绿、蓝3种颜色,是基于发光体的色彩模式,是目前运用最广的颜色系统之一。R、G、B的值域范围0~255。H、S、B的值是基于人眼的一种颜色模式。色相H的取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°。饱和度S是指颜色的强度或纯度,表示色相中彩色成分所占的比例,用从0%(灰色)~100%(完全饱和)的百分比来度量。亮度Bri表示颜色的明亮程度,通常取值范围为0%(黑)~100%(白)。转化而成的L*值、a*值、b*值的颜色空间是当前最通用的测量物体的颜色空间之一[17]。在这一颜色空间中,一种颜色由L(亮度)、a颜色、b颜色3种参数表征L*值域范围0~100,L*值越大表示所测样品的表面越亮。其中,a*正值为红色,负值为绿色,绝对值越大红色或绿色越深;b*值正值为黄色,负值为蓝色,绝对值越大,黄色或蓝色越深[18]。
2 结果与讨论
2.1 试验数据描述分析
由表1可知:花椒果实面积的标准值为26.667mm2,范围为22.843~34.086mm2,最小值与最大值相差11.243mm2;花椒果实长度、宽度及厚度分别以6.015、5.713 、5.556mm为基准上下浮动。花椒果实质量为0.069~0.120g,标准差为0.014,说明花椒果实质量的集中趋势较好。花椒果实的面积、长度、宽度、厚度的变异系数分别为8.76%、4.52%、4.92%、4.29%,比花椒果实质量、果柄与树枝间分离力、果实与果柄之间的分离力的变异系数小的多,说明花椒果实的形状比花椒果实的质量、果柄与树枝间分离力、果实与果柄间分离力的集中性更好,即花椒果实的形状较稳定。果实与果柄之间的分离力的标准差(0.588)比果柄与树枝之间的分离力的标准差(1.296)明显小,说明果实与果柄之间的分离力较为稳定,则设计花椒采收机械时,花椒果实与果柄之间的分离力相对稳定。而果柄与树枝之间的分离力相比果实与果柄之间的分离力波动幅度比较大,且整体分布上大于花椒果实与果柄之间的分离力。由此可知,如果使用机械设备使花椒果实与果柄分离,会使机械收获更加方便快捷。

表1 数据统计
由表2可知:F=16.324>Fcrit=4.007,说明花椒果实与果柄之间的分离力、果柄与树枝之间的分离力存在显著差异;P=0.000 159小于指定的显著水平α=0.05,即独立样本的总体分布存在显著差异,即两个不同位置的分离力分布有显著差异[19]。花椒果实与果柄之间的分离力、果柄与树枝之间的分离力的均值分别为1.642、2.692N,花椒果实与果柄之间分离力的最大值(3.015N)和最小值(0.980N)明显小于果柄与树枝之间分离力的最大值(5.780N)和最小值(1.025N),且花椒果实与果柄间分离力的最花椒大值和最小值之差为2.035N,较果柄与树枝间的分离力的最大值和最小值之差4.755N小很多。由此可知:果柄与树枝之间的分离力明显高于果实与果柄之间的分离力。即果实与果柄、果柄与树枝这两个不同位置之间的分离力分布有差异,说明不同位置对其对应的分离力有显著影响。
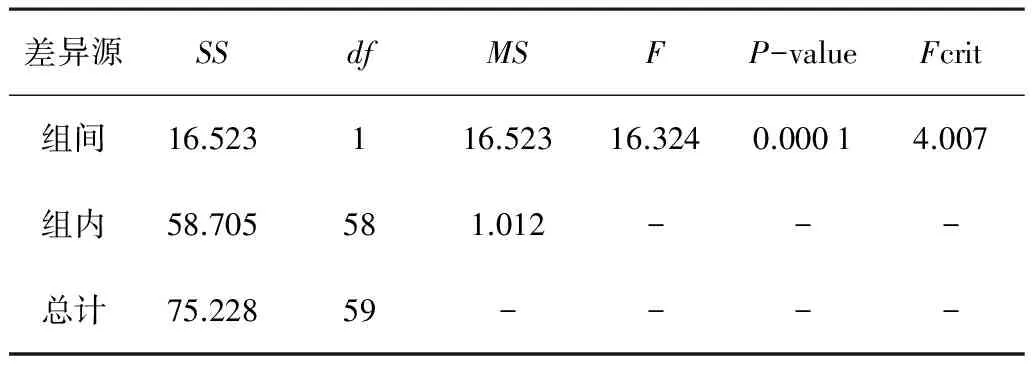
表2 果实与果柄、果柄与树枝之间的分离力的方差分析
综上所述,通过花椒的物料特性及其方差分析,可以为花椒果实机械采收提供合适的采摘位置和收获后果实处理等技术参数提供理论依据,以及为设计花椒采摘器的主要技术参数提供基础数据,同时给出了在设计中需注意的一些问题。
2.2 不同大小花椒果实的分布规律
花椒样本的面积范围及各范围内花椒果实数如图3所示。

图3 花椒果实不同面积范围果实个数
由表1的数据分析可知:花椒果实面积、长度、宽度及厚度的标准差分别为2.336、0.272、0.281、0.238,且花椒果实面积、长度、宽度、厚度的变异系数分别为8.76%、4.52%、4.92%、4.29%比花椒果实质量的变异系数15.52%小很多,说明成熟期花椒果实
的形状(近乎圆形)非常稳定且花椒果实面积的集中趋势较花椒果实质量好。又因花椒果实质量分布趋于小波浪形,波动幅度比较大;尤其考虑花椒果实受环境的影响,如在运输风干以及受环境温度等影响中,花椒果实质量比花椒果实面积受到温度的影响大,所以在花椒的机械化分级中,按花椒果实的面积分级比质量分级更为方便和准确。
对花椒果实样本的面积范围及各范围内花椒果实数目的分析可知:处于24mm2以上的花椒果实极多,约占全部花椒果实数量的90%。因此,从花椒果实大小分级的实用性及经济性考虑,设计花椒果实大小分级机械时可将其分为两级,应以24mm2为界线进行分级。
2.3 花椒果实的颜色特征测定
收获期花椒果实的颜色特征结果如表3所示。收获期花椒果实颜色特征R、G、B的变化区间分别为99.42~121.59、56.95~76.12、51.50~62.34,标准值分别为123.42、68.10、57.20;R的变异系数为4.68%比G、B的变异系数说明花椒果实在成熟期果皮红色较稳定。色相、饱和度以及亮度的范围为23.50~64.06、143.83~158.61和91.37~113.24,L*、a*、b*值的范围分别为30.31~35.45、14.34~26.2、13.36~20.05。
由此可知:韩城的大红袍品种花椒成熟后,花椒整体颜色的均值微偏橙色。
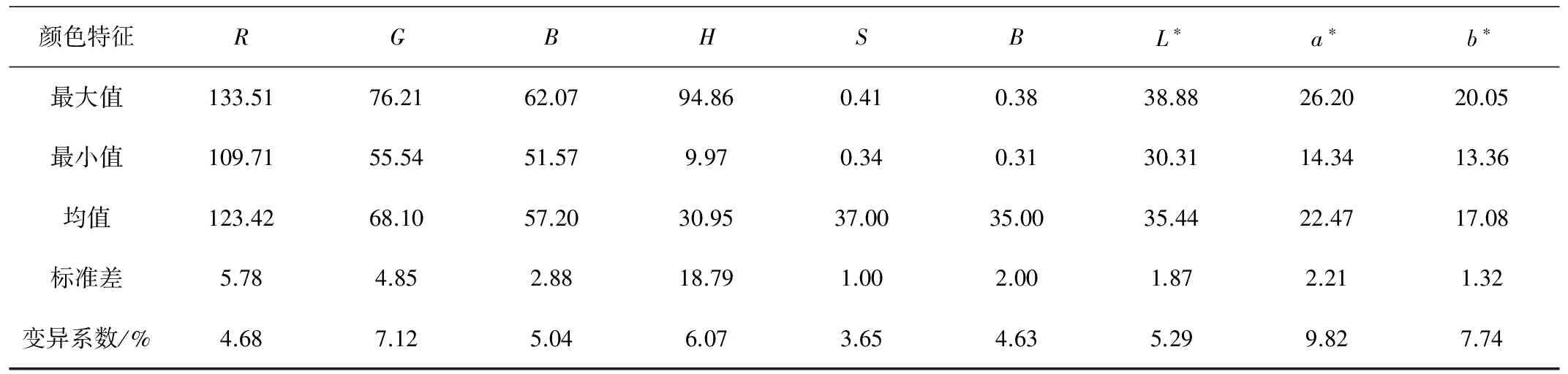
表3 花椒果实的颜色特征
3 结论
1)花椒果实的形状较为稳定,且花椒果实的形状比花椒果实的质量更为集中,因此考虑到收获后的花椒果实的分级以及经济性,花椒果实可以以24mm2(花椒果实形状面积)进行机械分级收获。
2)在收获期花椒自然生长状态下,约有98%果实与果柄之间所需分离力为(1.642±1.176)N,约有95%果柄与树枝之间所需分离力为(2.692±2.592)N。
3)花椒果实与果柄之间的分离力、果柄与树枝之间的分离力存在显著差异,且花椒果实与果柄之间的分离力较为稳定,所需分离力相对较小,所以机械收获时的采摘位置最好选择在花椒果实与果柄之间。
[1] 张涛依,张会玲.全自动花椒采摘机的结构设计[J].农业机械,2009(8):75-76.
[2] 李建红,张水华,孔令会.花椒研究进展[J].中国调味品,2009,34(2):28-31,35.
[3] 曾京京.我国花椒的栽堵起源和地理分布[J].中国农史,2000,19(4):68-75.
[4] 史劲松,顾龚平,吴素玲,等.花椒资源与开发利用现状调查[J].中国野生植物资源,2003, 22(5):6-8.
[5] 崔俊,李孟楼.花椒开发利用研究进展[J].林业科技开发,2008,22(2):9-14.
[6] 田安乐,郭小龙,冯宏波.花椒采摘器的设计研究[J].农机科技推广,2006(5):37.
[7] Coppock G E. Properties of young and mature 'Valencia' oranges related to selective harvest by mechanical means[J].Transactions of the ASAE, 1972, 15(2): 235-238.
[8] Ibrahim A A, Al-Jalil H F, Al-Duri S M. Fruit detachment force and selective harvest of Zahdi date variety[J]. J Agric Water Reso Res,1986, 5(2): 81-96.
[9] Crisosto C H, Nagao M A.Evaluation of fruit removal force of coffee cultivars[J].Horti-Science, Alexandria,1991, 26(2): 210-230.
[10] 张进,毕新胜,肖彬彬,等.加工番茄果茎分离力研究[J]安徽农业科学,2012,40(8): 5051-5053.
[11] 谢方平,罗锡文,汤楚宙.水稻粒穗分离力的研究[J].湖南农业大学学报:自然科学版,2004, 3(5): 469-471.
[12] 傅隆生,张发年,槐岛芳德,等.猕猴桃采摘机器人末端执行器设计与试验[J].农业机械学报, 2015,46(3):1-8.
[13] 张发年,李桢,王滨,等.猕猴桃果实物理参数与损伤因素的研究[J].农机化研究, 2014, 36(11): 141-145.
[14] 万芳新.花椒采摘机的设计与实验[J].安徽农业科技,2014,42(4):1229-1230,1253.
[15] Otsu N. A threshold selection method from gray-level histograms [J].Autom,1975, 11(285-296): 23-27.
[16] Wu X, Wang D, Sheng H. An Algorithm and Implementaion for Obtaining Minimum Exterior Rectangle of Image Region[J].Comput.Eng, 2004, 30(12):124-125,142.
[17] 李桂祥,马瑞娟,张斌斌,等.套袋对霞晖6号桃果实发育过程中果皮色素含量和色差的影响[J].江苏农业学报,2012,28(6):1418-1423.
[18] 散鋆龙,刘旋峰,牛长河,等.杏果实成熟度特性参数与果柄分离力的相关性分析[J].农业工程学报,2013,29(23):62-68.
[19] 苏工兵,刘俭英,王树才,等.苎麻茎秆木质部力学性能试验[J].农业机械学报,2007,38(5): 62-65.
Physical and Mechanical Properties of Zanthoxylum at Harvest Time
Feng Yali, Peng Jun, Sun Shipeng, Fu Longsheng
(College of Mechanical and Electronic Engineering, Northwest A & F University, Yangling 712100, China)
China is main and biggest planting area of Zanthoxylum, and reached 1.67×106 hm2in 2008. Harvesting of Zanthoxylum is mainly based on manual picking which is conflicting with rapidly increasing labor cost and labor shortage in farming. Therefore, it is very important to study mechanized harvesting technologies to improve the harvesting efficiency and promote the development of Chinese Zanthoxylum industry. Study of the mechanical characteristics of the harvest period can provide basic theoretical data for designing Zanthoxylum harvesting machinery. Since the differences of Zanthoxylum in the variety, soil conditions, climate and other aspects, the material properties of Zanthoxylum are also different. Therefore, through the laboratory determination of Zanthoxylum fruit from Hancheng city of Shaanxi province, the mechanical properties of Zanthoxylum were analyzed by image analysis and mathematical statistics. Geometric characteristic, separation force between fruit and stalk, and separation force between stalk and branches, as well as the color characteristics of Zanthoxylum fruit were studied. It was found that the separation force between fruit and stalk was significantly smaller than that between stalk and branch. And the fruit size was uniform.This study will provide a scientific basis for the development of the machine.Our hope is that this work will spark the renewal of a research or development process which will move the technology another step forward.
zanthoxylum; mechanical properties; color feature; separating force
2016-05-18
陕西省自然科学基础研究计划-青年人才项目(2015JQ306 5);国家自然科学基金项目(31301242)
冯亚利(1991-),女,山西大同人,硕士研究生,(E-mail)18792415467@163.com。
傅隆生(1984-),男,江西吉安人,副教授,博士,硕士生导师,(E-mail)fulsh@nwsuaf.edu.cn。
S183;S567.2
A
1003-188X(2017)07-0043-05
