大动态范围双通道相机的光谱定标
2017-11-25李永强赵占平王静怡张梦雨王雪
李永强 赵占平 王静怡 张梦雨 王雪
大动态范围双通道相机的光谱定标
李永强 赵占平 王静怡 张梦雨 王雪
(北京空间机电研究所,北京 100094)
双通道相机采用高亮度探测通道和低亮度探测通道动态范围相结合的方式,实现对观测视场内大辐亮度动态范围场景的成像;光谱定标的目的是得到大动态范围双通道相机的相对光谱响应。文章分析了使用光栅单色仪对双通道相机进行光谱定标时存在的问题;通过光谱定标光源功率调整和光谱定标光源相对光谱分布的传递测量,克服了光谱定标光源能量、标准探测器的动态范围、双通道相机响应动态范围三者不匹配的问题,解决了低亮度探测通道光谱定标时弱单色光信号标定的问题;对光谱定标光源的偏振态进行了调制,减小了测量光束偏振态引入的测试误差,分别实现了响应度差异大的两个通道的光谱定标。
光谱定标 大动态范围 双通道相机 光谱响应 航天遥感
0 引言
随着航天光学遥感技术的快速发展和微光增强型图像传感器技术的日益成熟[1-4],在对地观测方面提出了获取白天、夜间和晨昏时刻遥感图像产品的需求,这就要求光学遥感器在很大辐亮度范围内具备能清晰成像的能力。为了提高遥感图像产品的定量化反演精度,需要开展相对光谱定标[5-7],国内外关于可探测微光的大动态范围光学遥感器光谱定标的文献较少。
双通道相机采用共用镜头、分光棱镜分束的方式分成了低亮度探测通道和高亮度探测通道。低亮度探测通道目标辐亮度范围为1×10–9~1×10–4W/(cm2·sr),高亮度探测通道目标辐亮度动态范围为2×10–5~ 4×10–2W/(cm2·sr),两个探测通道动态范围结合,可以实现对观测视场内大辐亮度动态范围场景的成像。
双通道相机成像光路如图1所示,相机主要光学参数见表1。通过在镜头光学元件表面镀分光膜实现滤光,成像光线经分光棱镜时,透射通道为低亮度探测通道,反射通道为高亮度探测通道,两个探测通道工作光谱范围均为450~1 000nm。高亮度探测通道采用线阵CCD作为探测器,低亮度探测通道采用面阵型EMCCD器件[8],并选取EMCCD上与高亮度探测通道线阵CCD观测视场重合的一行像元输出作为低亮度探测通道成像[9]。
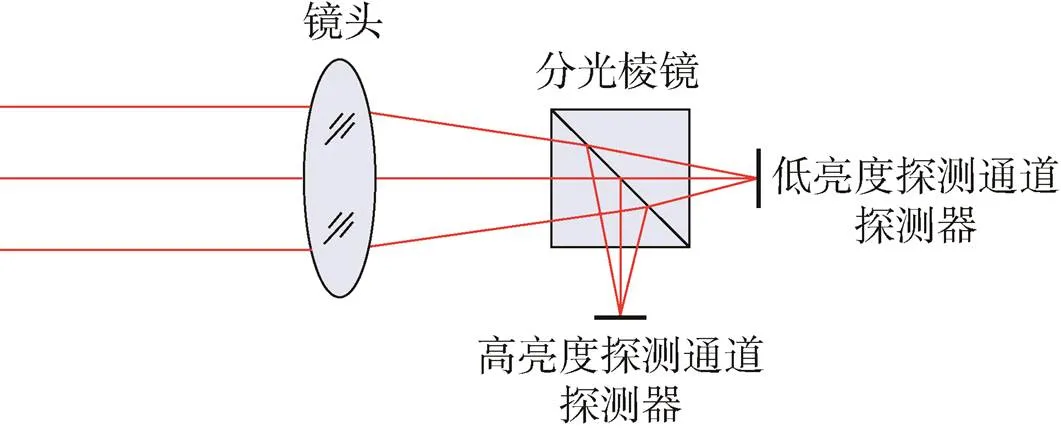
图1 双通道相机成像光路示意图
表1 双通道相机基本参数

Tab.1 Specifications of the dual-channel camera
双通道相机光谱定标的目的在于获取两个探测通道的相对光谱响应度[10-11],相机光谱定标要求波长精度优于1nm。双通道相机两个通道的响应度有很大差异,受光谱定标光源调整能力、标准探测器动态范围的限制,无法实现光谱定标装置在相同状态下对两个通道开展光谱定标,采用一般光谱定标方法可以实现对高亮度探测通道的光谱定标,但不适用于低亮度探测通道的光谱定标。相机设计的成像光线在分光棱镜分光面上有45°反射,光谱定标光束经分光面后偏振态会发生变化[12-13],当光栅单色仪经准直后的测量光束为椭圆偏振光时,光谱定标中会引入误差。因此,在大动态范围双通道相机光谱定标时,须解决低亮度探测通道光谱定标动态范围匹配和消除光源偏振引入测试误差两个主要难题[14]。
为提高光谱定标精度,得到双通道相机两个通道的相对光谱响应,本文提出基于相对光谱分布传递和偏振调制的光谱定标方法,通过试验获得了双通道相机两个通道的相对光谱响应。
1 光谱定标原理
航天遥感相机的光谱定标一般采用单色光源作为传递系统,将被测相机与标准探测器的光谱响应度进行比较,得到相机的相对光谱响应度。
首先,采用光谱响应度校准已知的标准探测器对单色光发生装置各波长下输出单色光的光谱辐射量进行标定,得到单色光的光谱分布;然后,采集大动态范围双通道相机在各单色光辐射情况下的输出,计算得到相机的相对光谱响应度[15-16]。
(1)单色光辐射量的标定
在各个波长下,标准探测器接收的单色光辐射量e()的计算公式为
式中c()为标准探测器在波长处的响应输出;c()为标准探测器在波长处的光谱响应度。
(2)相机相对光谱响应度测试
双通道相机的相对光谱响应度()通过下式计算得到

式中 DN()为双通道相机在单色仪输出中心波长处的单色辐射响应输出;DN0为双通道相机在单色仪无光输出时的响应输出。
根据式(2)计算得到遥感器的相对光谱响应度,进行归一化处理可得到相机的归一化相对光谱响应度r()[17],即
2 双通道相机的光谱定标方法
由于高亮度探测通道和低亮度探测通道的响应度差异非常大,在相同测试状态下,标准探测器动态范围无法满足两个通道光谱定标要求,因此,两个通道的光谱定标采取了不同的测试方法。
2.1 高亮度探测通道光谱定标
高亮度探测通道光谱定标所用测试装置如图2所示。采用输出功率可控的卤钨灯作为测试光源,光源会聚于双光栅单色仪入射狭缝处,经单色仪分光后,单色光从单色仪出射狭缝输出,经平行光管后输出为单色平行光,平行单色光经偏振器和1/4波片后转化为圆偏振光,单色光信号被已知光谱响应度的标准探测器接收。控制单色仪使输出不同波长,根据标准探测器在各波长下响应输出和校准已知的相对光谱响应度,可计算得到单色平行光的相对光谱分布。
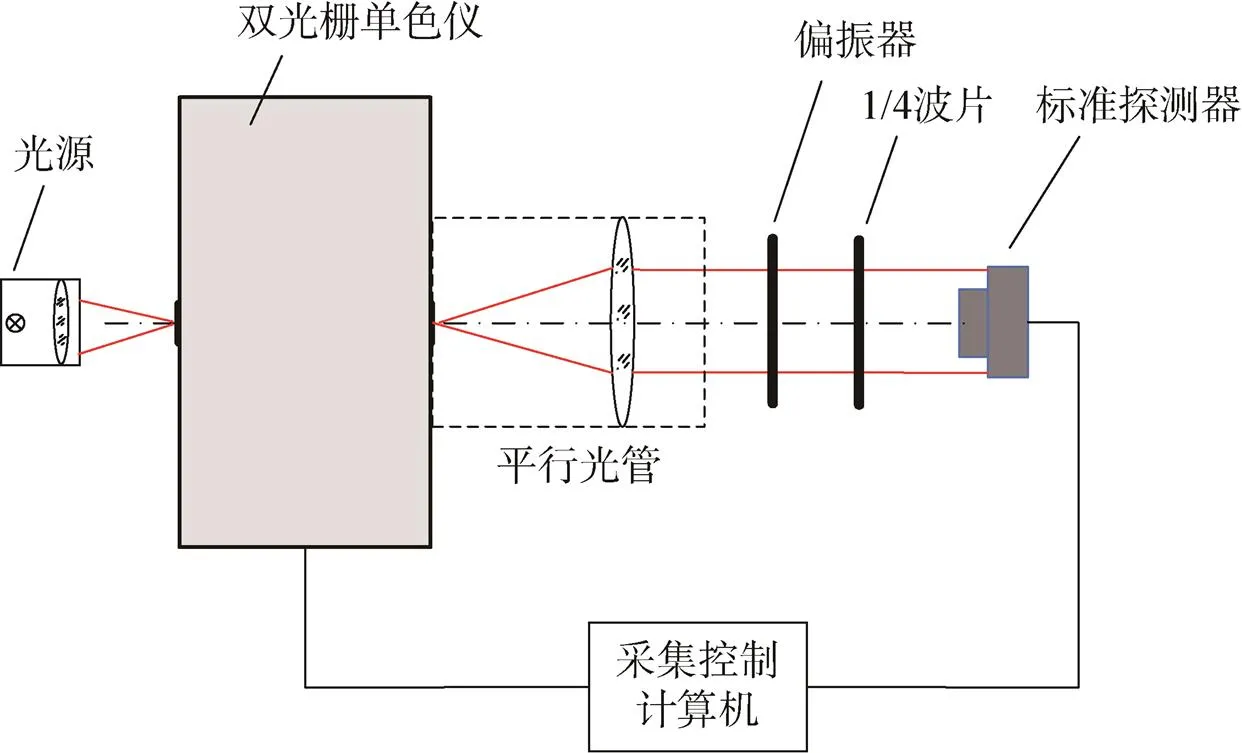
图2 高亮度探测通道光谱定标光源相对光谱分布测试
用待测双通道相机代替标准探测器,使单色平行光聚焦成像于高亮度探测通道像面,改变单色仪输出波长,相机采集各个波长下的图像数据,测试布局如图3所示。
2.2 低亮度探测通道光谱定标
低亮度探测通道光谱定标所用测试装置如图4所示,通过将光源的供电功率调低直至单色光满足低亮度探测通道测试需求,由于光源功率很小,为了测得单色仪输出的光谱分布,采用将标准探测器直接置于单色仪的出射狭缝处,对单色仪各输出波长下出射狭缝处的单色光信号进行测量,结合标准探测器的光谱响应度进行归一化计算得到单色仪输出的相对光谱分布。
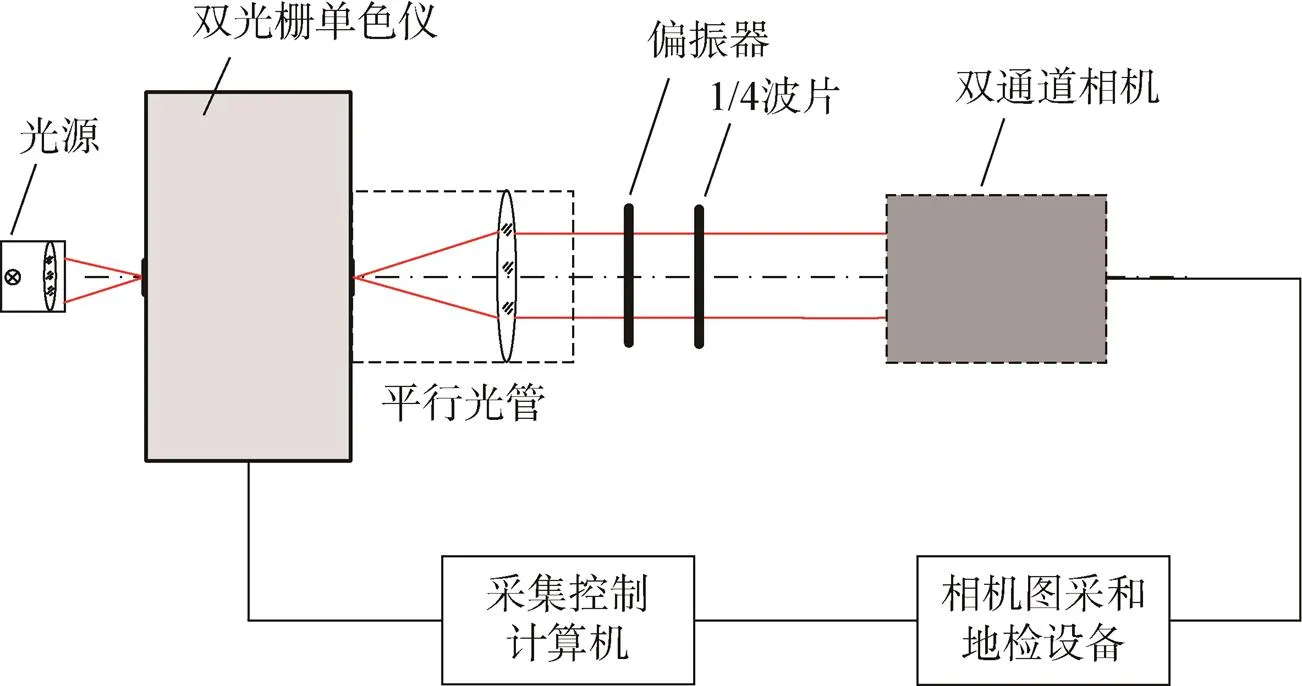
图3 高亮度探测通道相对光谱响应度测试
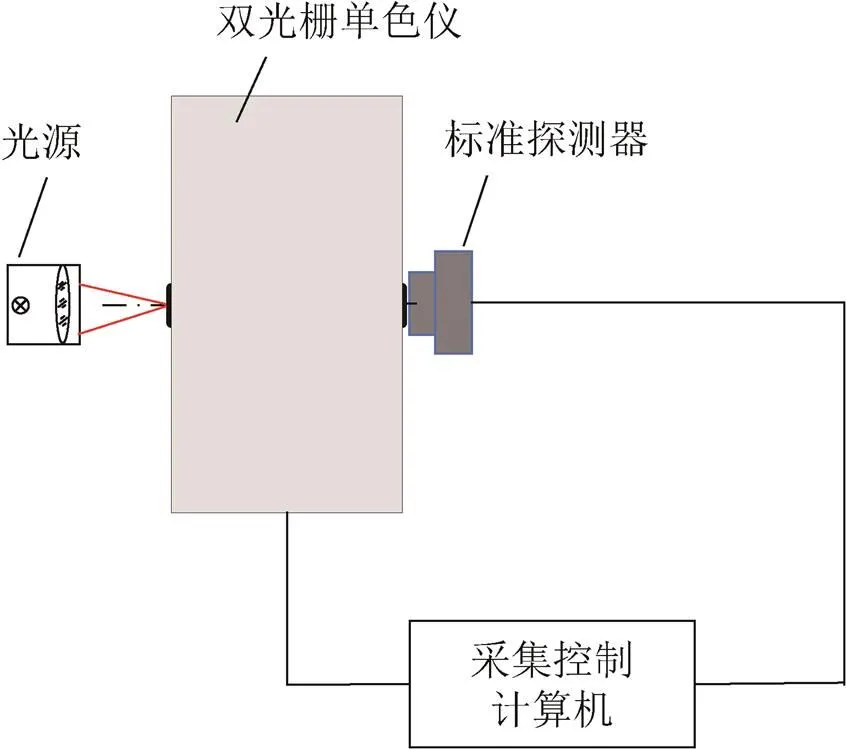
图4 低亮度探测通道光谱定标光源相对光谱分布的测试
低亮度探测通道光谱定标将标准探测器置于单色仪的出射狭缝处的优点在于:可以最大限度地收集探测出射狭缝处的光谱辐射功率,获得更高的信噪比;缺点在于:与标准探测器标定单色光源时的状态相比,标定相机时,相机与单色仪之间增加了平行光管、偏振片和1/4波片光谱透过率的影响。为了消除标准探测器标定单色光源的状态和与标定相机时光路状态不一致,在光源功率较高时,测得平行光管的相对光谱透过率,也测得了偏振片和1/4波片综合作用的光谱透过率,在计算相机相对光谱响应时将光谱透过率误差代入计算,消除了仪器标定状态和相机测试状态不一致的影响。
3 光谱定标试验
试验用单色仪采用Gooch & Housego公司的OL750双光栅单色仪,光栅刻线密度为1 200线/mm,当出射狭缝宽度为1.25mm时,输出单色光带宽为2.5nm。标准探测器的动态范围为108∶1。
在进行高亮度探测通道光谱定标时,由于采用了双单色仪,在测试光谱分辨率为2.5nm时,为了使标准探测器标定时具有较好的信噪比,使光源工作于额定功率150W附近,以获得最大的信噪比,并设置选择合适的相机参数,使动态范围与光源光谱辐亮度相匹配。光谱定标前,采用低压汞灯对单色仪波长进行校准,校准后单色仪输出中心波长的波长误差为0.3nm[18-20]。
由于低亮度探测用器件工作时通常都具有较大的暗信号输出,且实验室内不可避免地存在弱背景光,在测试过程中需测得通道对实验室背景光信号时的输出,在数据处理时剔除背景辐射和暗信号的影响。图5为测试得到的双通道相机的归一化相对光谱响应曲线。
采用低压汞灯对单色仪进行波长标定,实现了在450~1 000nm光谱范围波长精度优于0.5nm。
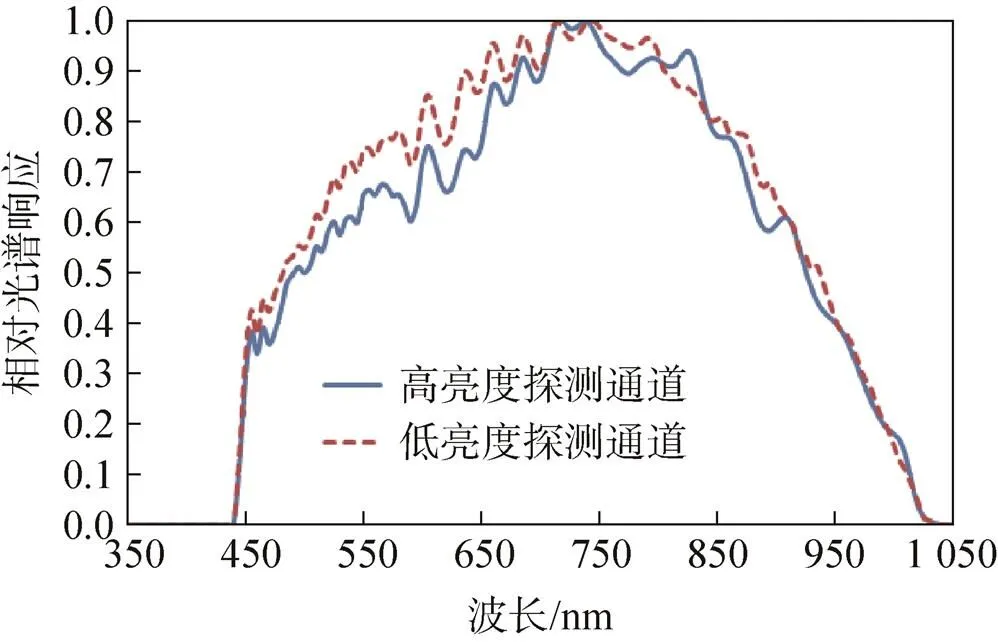
图5 相机相对光谱响应测试结果
两个通道相对光谱响应曲线不完全相同的主要原因是:分光棱镜的光谱透射比和光谱反射比在不同波长位置处是有变化的。由于两个通道共用镜头并具有相等的棱镜内光程,因此,在一些波长范围内两个通道的相对光谱响应曲线波动也有一定的相似性。
在进行双通道相机辐射定标时,在光源相对光谱分布不完全相同情况下,两个通道输出DN值与入射等效辐亮度之间的响应关系曲线的线性度均优于99.9%,验证了相对光谱响应测量结果的正确性。
4 结束语
针对大动态范围观测的双通道相机光谱定标需求,使用基于双光栅单色仪、消偏、差异化定标光路的办法,在光源和标准探测器动态范围有限的情况下,保证了光谱定标过程中用标准探测器标定光源和用光源标定相机两个过程的信噪比,获得了两个探测通道的归一化相对光谱响应,低亮度探测通道的光谱定标结果为开展高精度微光辐射定标工作打下了基础。
[1] 周立伟. 关于微光像增强器的品质因数[J]. 红外与激光工程, 2004, 33(4): 331-337.ZHOU Liwei. On Figure of Merit of Low Light Level Image Intensifiers[J]. Infrared and Laser Engineering, 2004, 33(4): 331-337. (in Chinese)
[2] 练敏隆, 王世涛. 基于ICCD的空间微光成像系统成像性能研究[J]. 航天返回与遥感, 2007, 28(3): 6-10.LIAN Minlong, WANG Shitao. Research on the Imaging Performance of Space Low Light Level Imaging System Based on ICCD[J]. Spacecraft Recovery & Remote Sensing, 2007, 28(3): 6-10. (in Chinese)
[3] VEIGNE J L, SZARLAN T, TADTKE N. Calibration of a High Dynamic Range, Low Light Level Visible Source[C]. SPIE Vol.8014, Infrared Imaging Systems: Design, Analysis, Modeling, and Testing XXII, Orlando, 2011: 801415.
[4] CHANG J H, VYGRANENKO Y, NATHAN A. Two-dimensional Sensor Array for Low-level Light Detection[C]. SPIE Vol.5578, Photonic Applications in Astronomy, Biomedicine, Imaging, Materials Processing, and Education, Ottawa, 2004: 420-427.
[5] 顾行发. 航天光学遥感器辐射定标原理与方法[M]. 北京: 科学出版社, 2013: 150-151.GU Xingfa. The Radiometric Calibration Principle and Method of Space Optical Remote Sensor[M]. Beijing: Science Press, 2013: 150-151. (in Chinese)
[6] 陈世平. 空间相机设计与试验[M]. 北京: 宇航出版社, 2003: 326-328.CHEN Shiping. Design and Test for Space Camera[M]. Beijing: The Astronautics Press, 2003: 326-328. (in Chinese)
[7] 白廷柱, 金伟其. 光电成像原理与技术[M]. 北京: 北京理工大学出版社, 2006: 347-350.BAI Tingzhu, JIN Weiqi. Photoelectric Imaging Principle and Technology[M]. Beijing: Beijing Institute of Technology Press, 2006: 347-350. (in Chinese)
[8] 安毓英, 曾晓东. 光电探测原理[M]. 西安: 西安电子科技大学出版社, 2004: 45-49.AN Yuying, ZENG Xiaodong. Photoelectric Detection Principle[M]. Xi’an: Xi’an Electronic Science and Technology University Press, 2004: 45-49. (in Chinese)
[9] 卜洪波, 陈瑞明, 张玉贵, 等. 基于电子倍增CCD的微光成像遥感器焦面电路设计[J]. 航天返回与遥感, 2012, 33(5): 47-54.BO Hongbo, CHEN Ruiming, ZHANG Yugui, et al. Focal Plane Circuit Design Based on Elcetron Multiplying CCD in Remote Sensor for Faint Light Imaging[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(5): 47-54. (in Chinese)
[10] MENDENHALL J A, PARKER A C. Spectral Calibration of the EO-1 Advanced Land Imager[C]. SPIE Vol.3750, Earth Observing Systems IV, Denver, 1999: 109-116.
[11] TEILLET P M, FEDOSEJEVS G, THOME K J. Spectral Band Difference Effects on Radiometric Cross-calibration between Multiple Satellite Sensors in the Landsat Solar-reflective Spectral Domain[C]. SPIE Vol.5570, Sensors, Systems, and Next-generation Satellites VIII, Maspalomas, 2004: 301-316.
[12] 史金辉, 王政平. 消偏振分光棱镜的设计与性能分析[J]. 哈尔滨工程大学学报, 2008, 29(9): 1019-1022.SHI Jinhui, WANG Zhengping. Design and Characteristics Analysis of Non-polarizing Beem Splitters[J]. Journal of Harbin Engineering University, 2008, 29(9): 1019-1022. (in Chinese)
[13] 姚启钧. 光学教程: 3版[M]. 北京: 高等教育出版社, 2002: 304-370.YAO Qijun. Optical Tutorial: 3rd ed[M]. Beijing: Higher Education Press, 2002: 304-370. (in Chinese)
[14] 康晴, 袁银麟, 李健军, 等. 通道式偏振遥感器偏振定标方法研究[J]. 大气与环境光学学报, 2015, 10(4): 343-349.KANG Qing, YUAN Yinlin, LI Jianjun, et al. Polarization Calibration Methods of Channel-Type Polarization Remote Sensor[J]. Journal of Atmospheric and Environmental Optics, 2015, 10(4): 343-349. (in Chinese)
[15] 金伟其, 胡威捷. 辐射度、光度与色度及其测量[M]. 北京: 北京理工大学出版社, 2006: 51-65.JIN Weiqi, HU Weijie. Radiometry, Photometry and Chromaticity and Its Measurement[M]. Beijing: Beijing Institute of Technology Press, 2006: 51-65. (in Chinese)
[16] SCHOTT J R, GERACE A, RAQUENO N, et al. Calibrating the Landsat 8 Thermal Bands[C]. SPIE Vol.9218, Earth Observing Systems XIX, 2014: 92181A.
[17] 李晓杰, 任建伟, 刘洪兴, 等. 面阵CCD光谱响应测试及不确定度评估[J]. 激光与光电子学进展, 2014, 51(11): 111200.LI Xiaojie, REN Jianwei, LIU Hongjie, et al. Spectral Response Testing and Uncertainty Evaluation of Plan Array CCD[J]. Laser & Optoelectronics Progress, 2014, 51(11): 111200. (in Chinese)
[18] DING L, COOPER J W, KOWALEWSKI M G, et al. Characterization of a Double Monochromator[C]. SPIE Vol.7826, Sensors, Systems, and Next-generation Satellites XIV, 2010: 782624.
[19] GRANGER E M. A Calibration Method for Radiometric and Wavelength Calibration of a Spectrometer[C]. SPIE Vol.3648, Device-independent Color Hardcopy and Graphic Arts IV, 1998: 237.
[20] MOUROULIS P, GREEN R O. Spectral Response Evaluation and Computation for Pushroom Imaging Spectrometers[C]. SPIE Vol.6667, Current Developments in Lens Design and Optical Engineering VIII, 2007: 66670G.
(编辑:王丽霞)
Spectral Calibration of Large Dynamic Range Dual-channel Camera
LI Yongqiang ZHAO Zhanping WANG Jingyi ZHANG Mengyu WANG Xue
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
The dual-channel camera includes two channels which are named as high-light-level detecting channel and low-light-level detecting channel. By combining the dynamic ranges of the two detecting channels, the image can be obtained for the scenes with a large dynamic range of radiance. The purpose of spectral calibration of the dual-channel camera is to acquire the relative spectral response. The problem for spectral calibration of the dual-channel camera with a grating monochromator was analyzed in this paper. The mismatch of dynamic ranges among the power of spectral calibration source, the response of the standard detector and the response of the dual-channel camera was resolved, then the spectral distribution of light source for spectral calibration of the low-light-level detecting channel was obtained. The error induced by polarization of the source was reduced by changing polarization state of beam. The spectral calibration was achieved for the two channels with large response difference.
spectral calibration; large dynamic range; dual-channel camera; spectral response; space remote sensing
TB96
A
1009-8518(2017)05-0044-06
10.3969/j.issn.1009-8518.2017.05.006
李永强,男,1979年生,2014年获西北工业大学飞行器设计专业硕士学位,高级工程师。研究方向为空间光学遥感器的系统测试技术。E-mail:99yongqiang@163.com。
2017-04-18
国家重大科技专项工程
