回转式日粮混合机混合机理分析与性能试验优化
2017-08-31李利桥王德福
李利桥 王德福 李 超
(东北农业大学工程学院, 哈尔滨 150030)
回转式日粮混合机混合机理分析与性能试验优化
李利桥 王德福 李 超
(东北农业大学工程学院, 哈尔滨 150030)
针对我国日粮混合机机理研究及自主设计不足的问题,结合我国畜牧业发展的实际需要,设计了一种在筒体内壁安装抄板的回转式日粮混合机,实现日粮的均匀混合。为揭示其混合机理,利用回转式日粮混合试验装置,借助高速摄像技术对其混合过程进行了观察和分析,结果可知:按筒体内物料颗粒群运动特征可将物料分布区域划分为提料区、抛落区、回料区,其中抛落区是主混合区,其物料以剪切混合为主、以扩散与对流混合为辅,且各个区域的位置、大小、形状受结构和运行参数的影响很大;同时,以筒体转速、物料装载率、混合时间、抄板安装角和抄板高度为试验因素,以变异系数、净功耗为评价指标,采用五因素五水平(1/2部分实施)正交旋转组合试验方法进行了性能优化试验,并确定其最佳参数组合为:筒体转速23.5 r/min、物料装载率65%、混合时间4 min、抄板安装角11°、抄板高度109 mm,此时变异系数、净功耗分别为2.09%、33.734 kJ,比优化前分别降低了64.4%和15.1%。
日粮混合机; 回转式; 抄板; 混合机理; 试验
引言
为克服传统精粗分饲方法的不足,牛场正在推广应用将营养配方中粗饲料、精饲料及各种添加剂混合均匀的日粮饲养技术,该饲养技术具有营养均衡、饲喂效率高、饲养成本低等优点[1-2],而拓展其应用的关键在于研制日粮混合机。
畜牧业发达国家研究日粮混合机起步较早,生产的机型主要分为立式和卧式两大类,其中立式主要包括单输送器日粮混合机和双输送器日粮混合机,卧式主要包括拨轮式、转臂式、回转式、单输送器至四输送器日粮混合机[3-4],且各机型已趋向于系列化和自动化;但国外日粮混合机基本由企业完成,由于企业技术保密,关于其混合机理的研究报道和文献资料很少;国外学者对其进行的研究主要偏重于应用研究,如日粮混合机混合加工性能及其混合均匀度试验方法研究[5-6]。我国对日粮混合机的研究较晚,而且是从以引进的立式单输送器日粮混合机、卧式三输送器日粮混合机等为样机进行改型设计开始的[4];加之国内生产日粮混合机的企业规模较小,基于日粮混合机机理研究的创新性设计欠缺。进口日粮混合机价格高、配套动力大[4],因此在跟踪国外技术的同时,我国急需开展日粮混合机的机理研究及自主设计;我国学者开展的日粮混合机研究主要是针对已有混合机的试验研究[2-3,7-8],而对其混合机理、功耗的研究报道较少[4,9]。
为促进日粮饲养技术在我国的推广应用,结合我国小规模牛场以及因牛舍与槽道限制而无法实现日粮直接投放传统牛舍的实际需求和大中型混合机(尤其是固定式日粮混合机)在规模化牛场中的应用现状,急需配套结构简单、制造及使用成本低、兼具混合及喂料功能的中小型日粮混合机。因此,根据上述需求,设计一种回转式日粮混合机,其主要混合部件为筒体,可在此基础上制成自走式日粮混合机以满足应用需求。本文利用回转式日粮混合试验装置,借助高速摄像技术对其混合过程进行观察和分析,以揭示其混合机理,并对影响其混合性能的关键参数进行优化试验。
1 总体结构与工作原理
设计的回转式日粮混合试验装置主要由筒体、传动系统和机架等部分组成,其外形尺寸(长×宽×高)为1.93 m×0.99 m×1.43 m,如图1所示。其中混合核心部件——筒体是由外侧围板通过支臂、环形支撑框和端侧挡板等部件与传动轴(呈水平方向安装)相连而成的一个整体,筒体直径、宽度分别为806、584 mm,在筒体内壁安装抄板(主要工作部件),传动轴一端通过链传动机构与XWD-5型摆线针轮减速电动机连接,减速电动机固定在机架的下部。为便于观察筒体内物料颗粒的运动情况,筒体端侧挡板用透明有机玻璃板制作。
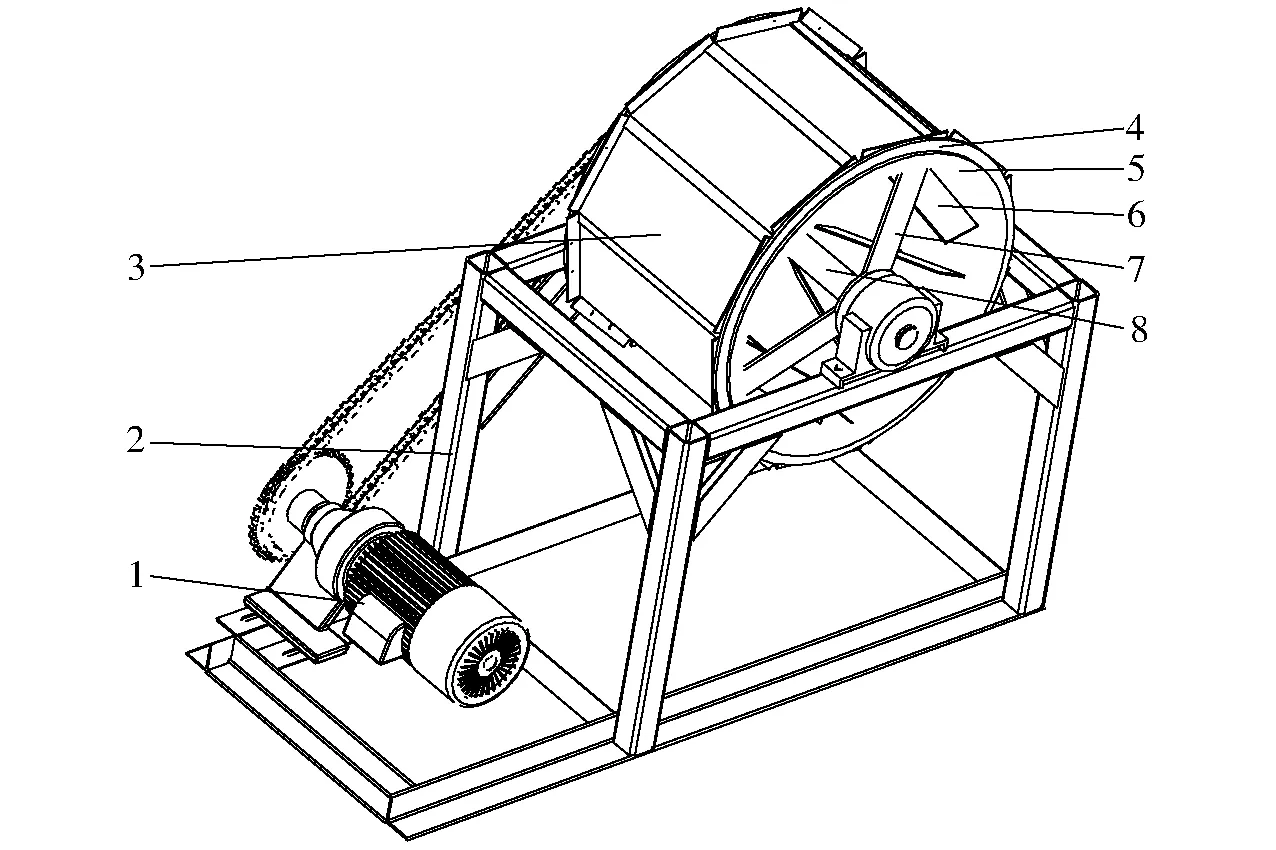
图1 回转式日粮混合试验装置总体结构示意图Fig.1 Schematic diagram of overall structure of rotary ration mixing experimental device1.减速电动机 2.机架 3.外侧围板 4.环形支撑框 5.端侧挡板 6.抄板 7.支臂 8.传动轴
工作时,将各种精粗饲料及添加剂投入筒体内,由减速电动机通过传动轴驱动筒体旋转,在抄板对物料颗粒的托带力、物料颗粒所受的离心力、物料颗粒相互间摩擦力等的综合作用下,筒体底部的物料颗粒将随筒体的旋转而向上运动,并在被提升到一定高度后因受自身重力、抄板抛撒力等综合作用而下落,形成以剪切混合为主、以对流与扩散混合为辅的混合过程,当物料颗粒下落至底部区域后,随着筒体的旋转,又将重复上述混合运动过程,并最终经过多次循环运动而得到分布均匀的日粮。
2 关键工作部件参数分析
抄板是筒体中用来提升和抛撒物料颗粒的主要工作部件,常用的抄板结构形式有直板、直角板、弯板,考虑到日粮中秸秆类物料颗粒(属于典型的粘弹性物料,同时具备固体和流体的特性[10])占较大比例,并结合预试验结果,本文将抄板设计为直板式。
由于抄板安装角(抄板与传动轴轴线之间形成的锐角)和抄板高度(抄板在筒体径向上的高度)是决定抄板在筒体内分布情况的2个主要参数,故对其进行研究。
抄板对与其接触的物料颗粒A的作用情况如图2所示。图中,θ1为抄板作用在物料颗粒A上的推力方向与抄板法线方向的偏转角,该角主要由物料颗粒对抄板的摩擦角决定[9];θ2为抄板安装角;ω为筒体角速度,下同;Ft为抄板对物料颗粒的推力,可分解为周向力Fp和轴向力Fa。其中,周向力Fp的作用是推动物料颗粒在与传动轴轴线垂直的横截面内运动,并在到达一定高度后依靠自身重力和抄板抛撒力等综合作用而下落,对物料颗粒相互间的剪切混合、扩散混合作用较大;轴向力Fa的作用是推动物料颗粒沿着传动轴轴线方向不断地从一个横截面向另一个横截面运动,对物料颗粒相互间产生一定的对流混合作用。因此,在抄板推力的作用下,物料颗粒在筒体内形成了一个沿周向和轴向的多方位复合运动,使得物料颗粒的位置重新排列,加快了物料颗粒间的变位和渗透混合。
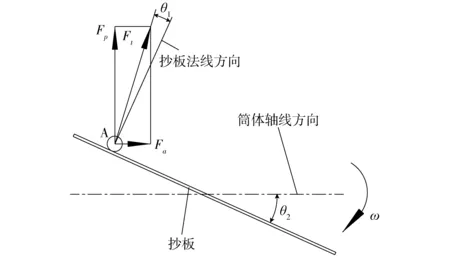
图2 抄板对物料颗粒的推力分解示意图Fig.2 Thrust decomposition of shoveling plate to material particle
由图2可知,抄板安装角θ2越小,抄板推动物料颗粒的周向力Fp越大,轴向力Fa越小,影响了物料颗粒在三维空间上的变位和渗透混合。当抄板安装角θ2增加到一定程度后物料颗粒所受的轴向力Fa也会减小,且其有效提升物料颗粒的作用减弱,即物料颗粒所受的周向力Fp减小,此时处于抛落状态的物料颗粒数量减少,降低了混合效率。因此,抄板需与传动轴轴线呈一定角度安装。为探索抄板安装角对混合性能的影响,结合筒体尺寸及相关资料[4],将抄板安装角设置为0°~32°可调。
为使物料颗粒在抛落过程中产生交替变向(交错)的物料颗粒剪切面,将筒体内相邻抄板按反向布置方式安装,进而强化物理机械特性不同的精粗饲料在三维空间上相互变位和渗透。为获得较佳的混合效果,结合上述分析结果、筒体尺寸、相关资料[11-13]及预试验结果,确定抄板个数为10,此时抄板间距约为253 mm,其在筒体外侧围板上安装的平面展开图如图3所示。
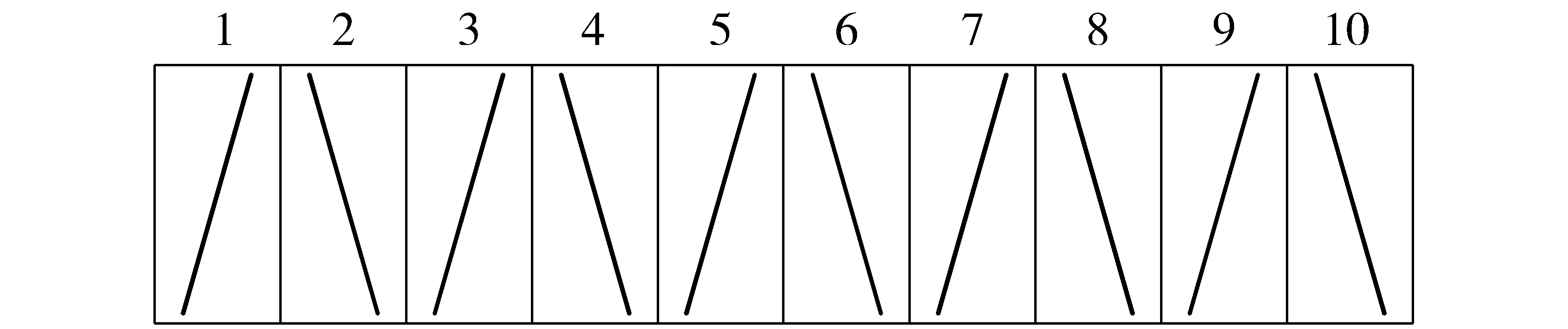
图3 筒体内抄板排列展开图Fig.3 Expanded diagram of arrangement of shoveling plates in drum
抄板高度较小时,抄板对物料颗粒的提升和抛撒能力较弱,混合运动较弱,混合效率较低。但抄板高度过大,会阻碍物料颗粒在筒体内的运动,不利于物料颗粒之间的混合。因此,结合筒体尺寸及相关资料[4,11-13],设计抄板高度的可调极限范围为50~150 mm。
3 混合过程分析
为实现较佳的混合效果,需要研究分析回转式日粮混合机主要结构和运行参数对其混合过程的影响。本文在对其混合过程进行理论分析的基础上,结合高速摄像技术对不同结构和运行参数下的混合过程进行观察和分析。
3.1 混合过程中物料颗粒群的区域分布
通过混合过程观察分析可知:在不同工况下,筒体内物料颗粒的运动状态不同,但随着筒体的旋转,物料颗粒群的宏观运动呈现出周期性的变化规律。为讨论方便,根据筒体内不同物料颗粒群的运动变化情况,将筒体内物料运动区域划分为提料区、抛落区、回料区(见图4,不同工况下各区域的位置、大小、形状不同)。
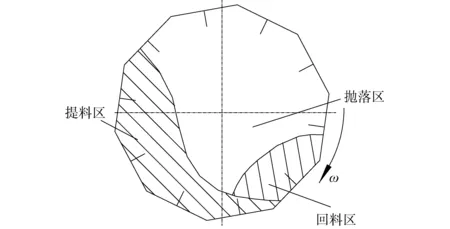
图4 筒体内物料颗粒群运动区域分布示意图Fig.4 Schematic diagram of regional distribution of movement of material particle group in drum
(1)提料区
该区是由于物料颗粒受抄板的托带力、物料颗粒所受的离心力、物料颗粒相互间摩擦力等的综合作用而形成的,该区域内物料颗粒在随抄板旋转和上升的过程中径向位移变化不明显,但由于抄板带动的物料颗粒群层较厚,超过抄板高度的物料颗粒层之间存在速度梯度(越靠近传动轴,物料颗粒层速度越低),使得物料颗粒层之间形成摩擦剪切面,进而发生剪切混合。该区域内物料颗粒的运动状态主要受抄板高度、筒体转速、物料装载率(物料颗粒群所占容积与混合室容积之比)的影响。
(2)抛落区
该区是由于提料区内物料颗粒被提升到一定高度后受自身重力、抄板抛撒力等的综合作用下落而形成的,该区域内物料颗粒在抛落过程中会产生交错的物料颗粒剪切面(因相邻抄板按反向布置方式安装),同时抛落的物料颗粒与提料区表层上的物料颗粒相互摩擦和碰撞,使得物料颗粒相互间形成较强烈的以剪切混合为主的变位和渗透混合,并产生一定的以扩散与对流混合为特征的变位和渗透混合。该区物料颗粒的运动状态主要受抄板高度、抄板安装角、筒体转速、物料装载率的影响。
由于抛落区是物料颗粒群进行混合的主要区域,因此实现有效抛落极其重要。为此,需要对物料颗粒随筒体旋转的极限转速进行分析。
设筒体内全部物料颗粒是一群质点的集合,并形成完整的质点组力学体系。为简化问题,选取紧贴于筒体内壁的单个物料颗粒(视其为质点)为研究对象,并将选取质点与筒壁的线速度视为相同,则质点在随筒体的旋转而上升的过程中,将受到自身重力G、筒体内壁对质点的支持力FN和摩擦力Ff的共同作用[14],如图5所示。
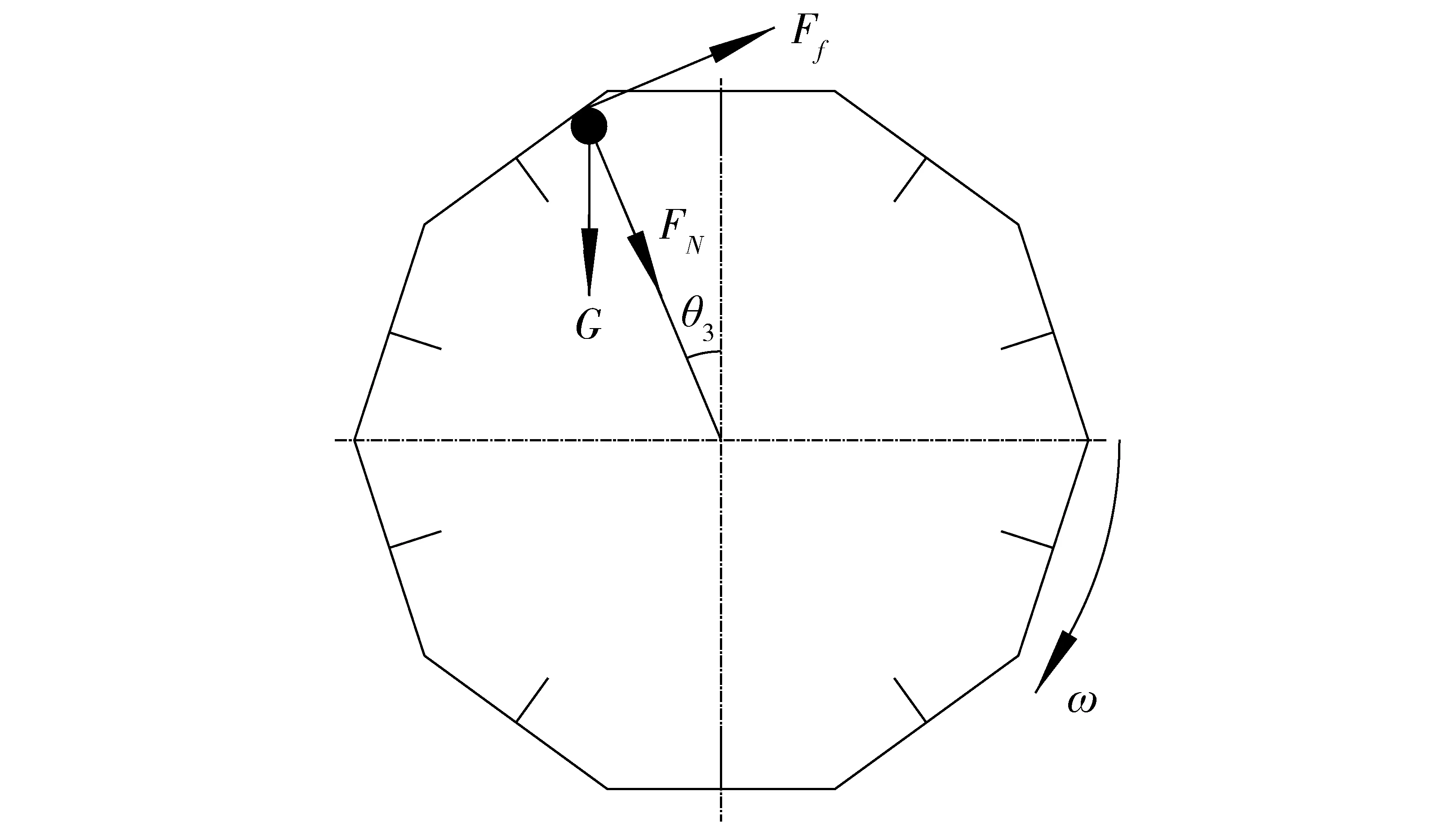
图5 筒体内物料颗粒的受力分析Fig.5 Force analysis of material particle in drum
质点在法线上的平衡方程为
mω2r=FN+Gcosθ3
(1)
其中
G=mg
(2)
式中m——质点质量,kgω——筒体角速度,rad/sr——筒体半径,mg——重力加速度,9.8 m/s2θ3——质点重力G与筒体内壁对质点的支持力FN之间的夹角,(°)
质点紧贴于筒体内壁时,其线速度等于筒壁的线速度,则有
(3)
式中v——筒壁线速度,m/sn——筒体转速,r/min
由式(1)~(3)可得
(4)
当物料颗粒开始下落时,满足FN=0,则此时满足
(5)
由式(5)可知,夹角θ3越小,则筒体转速n越大。当θ3=0°时,n达到最大值47.1 r/min(临界转速),此时紧贴于筒体内壁的物料颗粒在到达筒体内最高点时不下落,不利于实现物料颗粒的有效抛落。因此,为利于筒体提升区内物料颗粒在抛落区内尽快进入抛落状态,筒体转速应小于47.1 r/min。
(3)回料区
该区是抛落区内物料颗粒下落至筒体底部后形成的,随着筒体的旋转,该区域内物料颗粒因分别来自靠近提料区右侧与拋落区右侧而形成以对流混合为主的变位和渗透混合。该区域内物料颗粒的运动状态主要受筒体转速、物料装载率的影响。
综上所述,筒体不同分区内物料颗粒群的运动规律主要受筒体转速、物料装载率、抄板安装角、抄板高度的影响。
3.2 混合过程的高速摄像分析
结合上述分析结果,利用Phantom V5.1型数字式高速摄像机(Vision Research Inc.,美国)对不同工况下筒体内物料的混合过程进行研究。由预试验确定拍摄频率为600 f/s,并通过筒体运转平稳后所摄的混合过程影像逐帧分析物料颗粒的运动过程,进而确定物料的混合过程。
3.2.1 抄板对混合运动的影响
在抄板安装角为10°、物料装载率为35%、筒体转速为16 r/min的情况下,从抄板高度为73、140 mm时所摄影像中分别截取物料刚进入抛落区及之后在相同时间间隔时的特征状态图像,如图6所示(图中筒体按顺时针方向旋转,下同)。
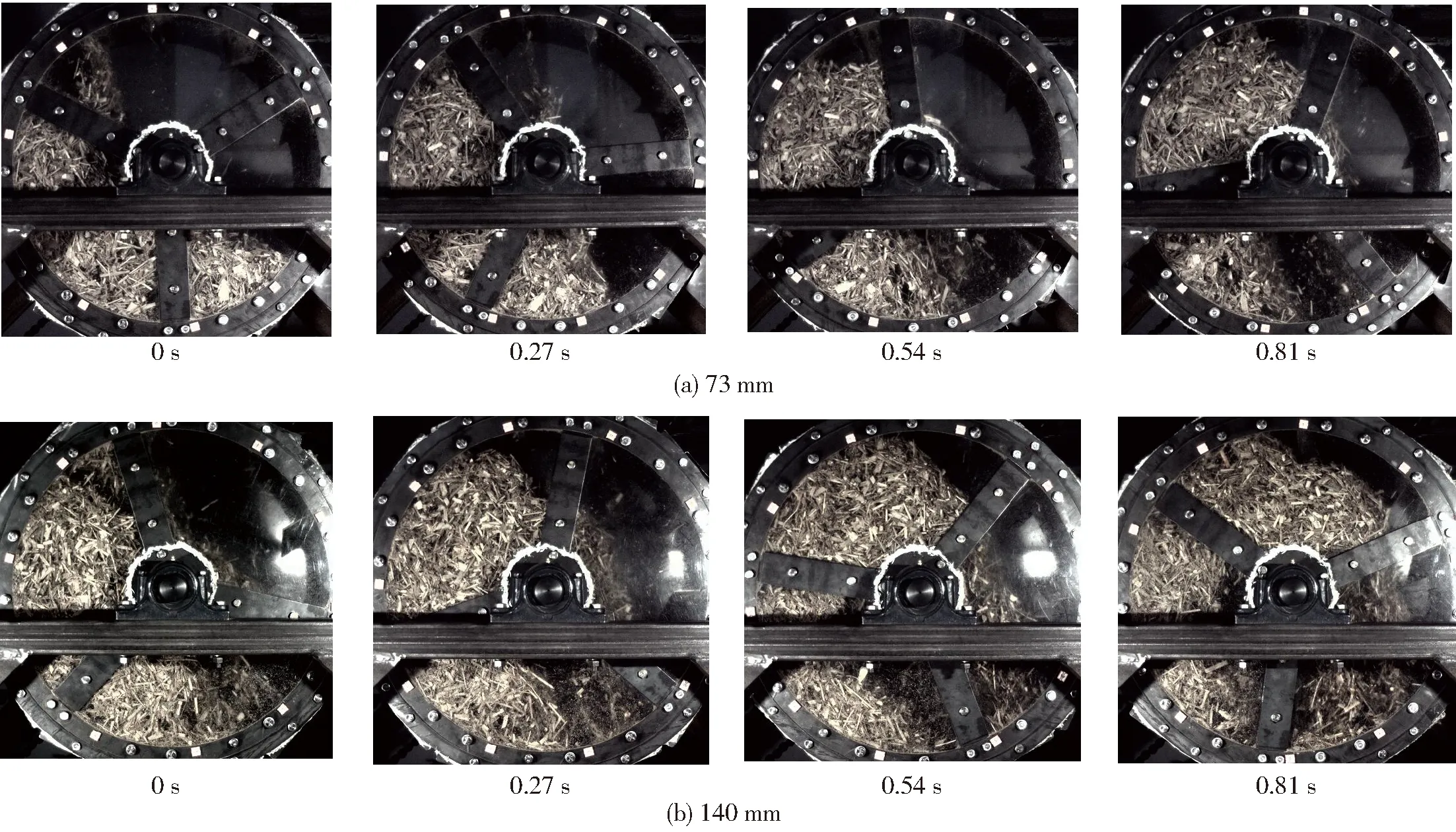
图6 抄板高度对筒体内物料颗粒群运动状态的影响Fig.6 Effect of height of shoveling plate on movement state of material particle group in drum
由图6可知,抄板高度从73 mm增大到140 mm有助于物料颗粒的提升,但由抄板带动的物料颗粒群层厚度增大,伴随筒体运动的物料颗粒群增多,筒体内物料提料区变大、抛落区右移,处于提升运动状态的物料颗粒群增多,尽管物料颗粒在抛落区顶部开始抛落的位置提高,但物料颗粒群是以物料团的形式抛落,物料颗粒间的变位和渗透能力降低,混合作用减弱。
由预试验结果可知,由于相邻抄板按反向布置方式安装,一定大小的抄板安装角有助于使物料颗粒在抛落过程中产生交错的物料颗粒剪切面,进而强化剪切混合运动,同时有助于产生一定的扩散和(轴向)对流混合运动(相对于周向混合运动较弱)。
3.2.2 筒体转速对混合运动的影响
在抄板高度为73 mm、抄板安装角为25°、物料装载率为35%的情况下,从筒体转速为16、34 r/min时所摄影像中分别截取物料刚进入抛落区及之后在筒体旋转相同角度时刻的特征状态图像,如图7所示。
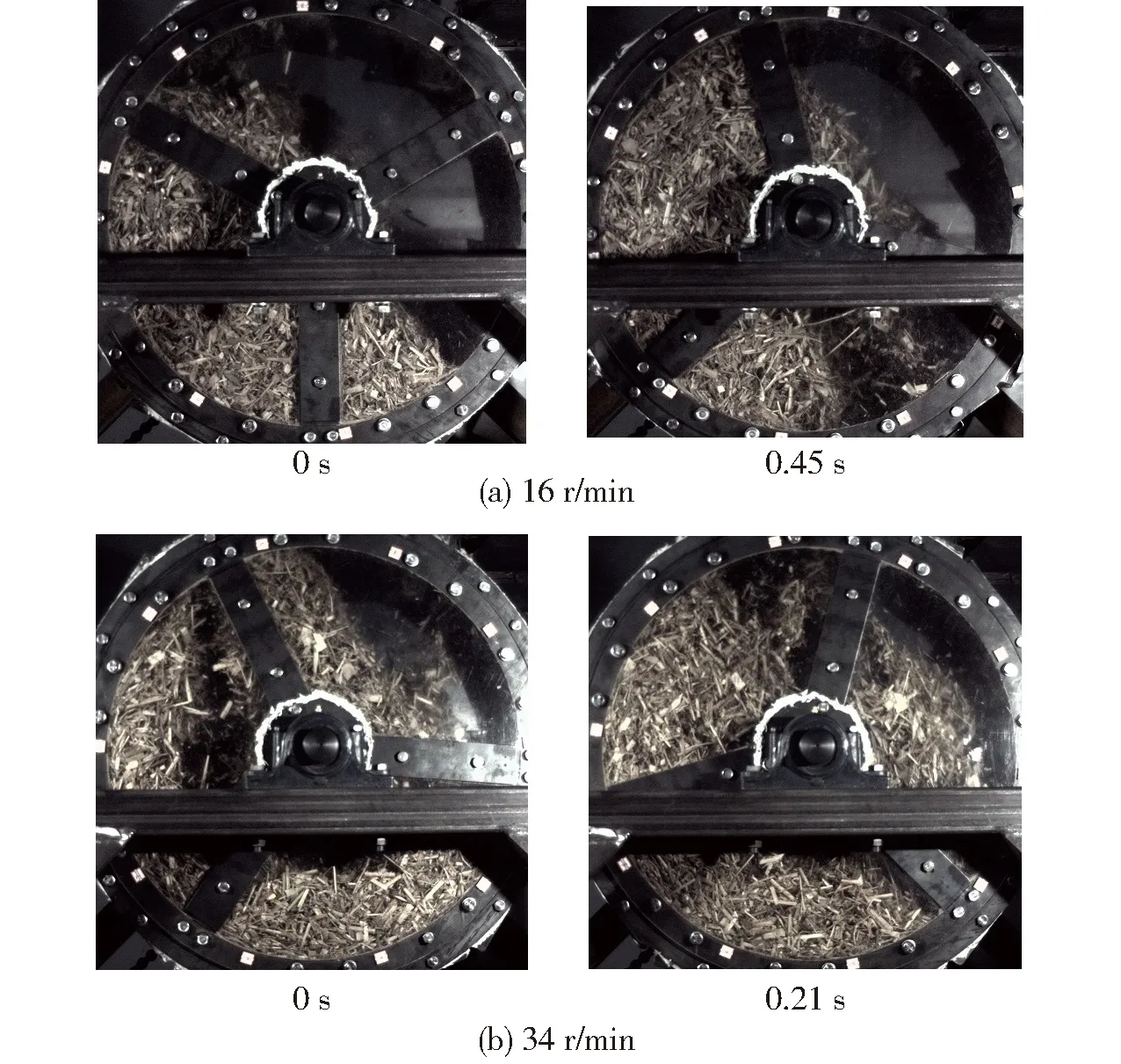
图7 筒体转速对筒体内物料颗粒群运动状态的影响Fig.7 Effect of rotary speed of drum on movement state of material particle group in drum
由图7可知,当筒体转速为16 r/min时,大部分物料颗粒因不能上升到足够的高度而使物料颗粒在抛落区顶部开始抛落的位置较低,而且处于抛落状态的物料颗粒较少,物料颗粒以受自身重力为主(因其所受的离心力较小)下落,抄板对物料颗粒的抛撒作用较弱,筒体内物料提料区较小,物料颗粒以剪切混合为主实现变位和渗透混合。当筒体转速为34 r/min时,物料颗粒所受到的离心力、抛撒力较大,筒体内物料提料区变大、拋落区右移,由于物料颗粒从抄板下落时获得的抛撒初速度增大,物料颗粒以剪切混合为主、以扩散与对流混合为辅实现变位和渗透混合。
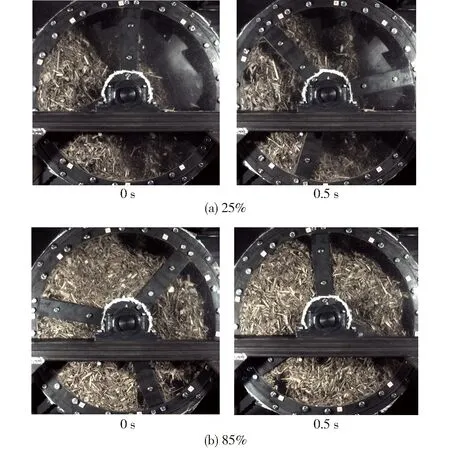
图8 物料装载率对筒体内物料颗粒群运动状态的影响Fig.8 Effect of loading rate of materials on movement state of material particle group in drum
3.2.3 物料装载率对混合运动的影响
在抄板高度为95 mm、抄板安装角为16°、筒体转速为25 r/min的情况下,从物料装载率为25%、85%时所摄影像中分别截取物料刚进入抛落区及之后在相同时间内的特征状态图像,如图8所示。
由图8可知,当物料装载率为25%时,筒体内物料提料区较小、拋落区范围较大,有利于物料颗粒沿交错剪切面下落、并沿轴向产生横截面之间的运动,也有利于不同回落方向的物料颗粒在回料区产生对流混合,从而实现物料颗粒群在筒体内三维空间上的混合过程。当物料装载率为85%时,物料密实度较大,物料颗粒间的内摩擦力较大,提料区内伴随筒体运动的物料颗粒层厚度较大,拋落区范围较小,物料颗粒群以物料团的形式运动,物料颗粒抛落运动不明显,物料颗粒间的变位和渗透混合过程大幅度减弱。
综上所述,随着筒体转速、物料装载率、抄板安装角和抄板高度的变化,筒体内物料颗粒的运动状态也相应地发生不同程度的变化,且物料颗粒群在混合过程中的循环运动次数还受混合时间的影响。
4 混合性能试验
为研究关键参数对回转式日粮混合机混合性能的影响规律,利用回转式日粮混合试验装置进行了试验研究。
4.1 仪器设备与试验材料
试验仪器与设备包括回转式日粮混合试验装置、功率测控系统(东北农业大学工程学院研制,结构和工作流程如图9所示)、FRN37G11S-4CX型变频器(富士电机株式会社)、BSA3202S型电子天平(分辨率0.01 g,最大称量3 200 g,赛多利斯科学仪器有限公司)、电子秤、秒表等。其中,功率测控系统的测控原理为:利用多功能电力仪表提供的串行异步半双工RS485通信接口,将电信号(由转矩和转速等物理信号转换)以固定数据格式经由RS485-USB型转换器转换后传送给计算机,运用计算机软件(基于LabVIEW编程开发)对记录数据进行运算和处理,最终实现对功率消耗的实时检测。
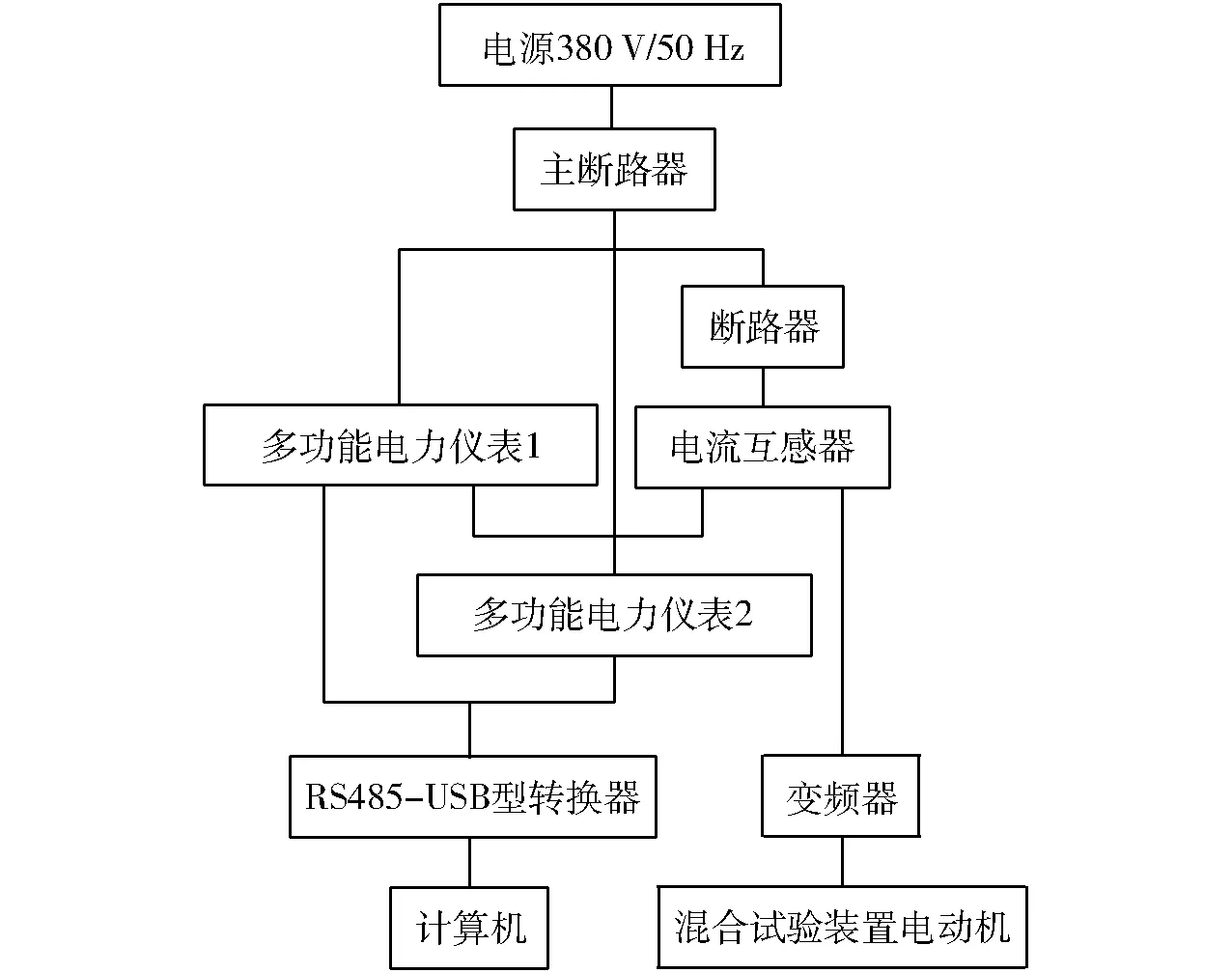
图9 功率测控系统结构与工作流程图Fig.9 Structure and work flow diagram of power measurement and control system
参考相关资料[2,4,8-9,15],依据精粗比35∶65(以干物质质量比为基础)选择日粮中具有典型代表性的原料组成试验日粮,具体包括:55%青贮玉米(含水率70%)、10%干草(含水率11.38%)、24.5%玉米面(含水率12.35%)、10%豆粕(含水率11.09%)和0.5%盐(含水率0.5%),其中前2种原料为粗饲料。
4.2 试验方法
4.2.1 试验因素及水平的确定
根据相关资料[4,6,16]、筒体结构尺寸及混合过程分析,确定影响该机混合性能的筒体转速n、物料装载率Lr、混合时间T、抄板安装角θ2、抄板高度H等5个主要结构和运行参数为试验因素,根据混合过程分析、单因素预试验结果和生产实际,确定各试验因素取值范围分别为:筒体转速10~40 r/min、物料装载率20%~80%、混合时间4~20 min、抄板安装角0°~32°、抄板高度63~127 mm。
4.2.2 评价指标及测定方法
参照文献[2],选用混合均匀度作为衡量回转式日粮混合试验装置在不同工况下混合性能的主要评价指标,并选用变异系数对其进行考核。同时为研究不同工况下所需的功耗,并使其更具可比性和研究意义,参照文献[17],选用对筒体内物料颗粒进行混合时所需的净功耗(以下简称为净功耗)为评价指标。
各评价指标计算方法如下:
(1)变异系数
通过采用四分法对样品中氯离子含量进行测定[16],其对应变异系数的计算公式为
(6)
式中S——每次试验每个试样中氯离子的质量浓度C的标准差,g/L
(2)净功耗
净功耗的计算公式为
Wj=Wf-Wk
(7)
式中Wj——净功耗,主要包括物料颗粒运动时重心上移及克服内摩擦所需的功耗,J
Wf——机组负荷功耗,即对筒体内物料颗粒进行混合时,维持回转式日粮混合试验装置、功率测控系统和变频器等运行所需的功耗,J
Wk——机组空载功耗,即机组在空载状态下维持自身运行所需的功耗,主要包括混合试验装置空载功耗、传动损失功耗、变频器损失功耗等,J
功耗是由功率测控系统测定的功率、混合时间推导而得,其计算公式为
(8)
式中W——功耗,JPi——第i个时间间隔内的瞬时功率,WΔt——采集瞬时功率的时间间隔,0.062 5 sN——在混合时间内采集瞬时功率的次数
由预试验结果及相关资料可知,在混合时间一定时,机组空载功耗主要受机组空载功率的影响,而机组空载功率又主要受筒体转速的影响,故利用功率测控系统检测不同筒体转速对应的机组空载功率,并运用Matlab拟合工具箱对检测出的数据进行回归分析及曲线拟合,得到机组空载功率与筒体转速n之间的拟合方程
Pk=4.928n+0.448 (R2=0.96)
(9)
式中Pk——机组空载功率,W
由式(9)的决定系数可知,拟合方程整体的拟合度较好,故能用于表达机组空载功率与筒体转速之间的总体关系。
4.2.3 试验设计方案
由混合过程分析及预试验结果可知,各试验因素需要合理搭配、协同考虑。因此,经过综合考虑不同试验设计方法的特点和实施试验的工作量,选择采用五因素五水平(1/2部分实施)的二次回归正交旋转组合试验方法来安排试验,定量分析筒体转速n、物料装载率Lr、混合时间T、抄板安装角θ2和抄板高度H对变异系数Y1、净功耗Y2的影响。试验因素水平编码如表1所示,试验方案如表2所示。表中Z1、Z2、Z3、Z4、Z5分别表示筒体转速、物料装载率、混合时间、抄板安装角、抄板高度的编码值。
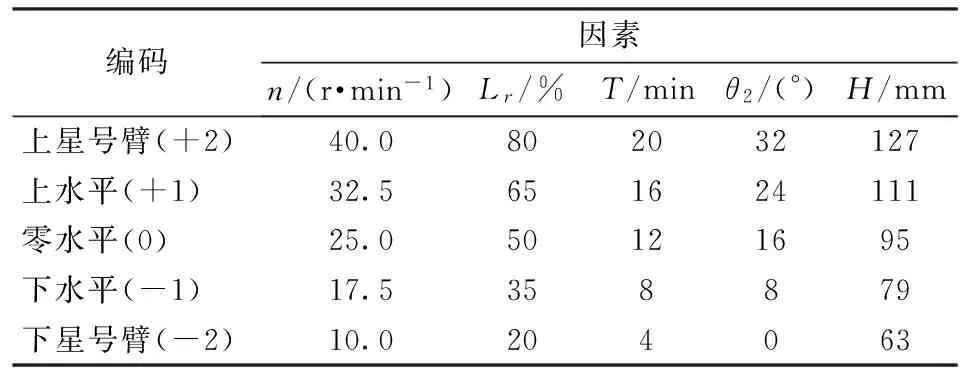
表1 试验因素编码Tab.1 Codes of experimental factors
4.3 试验结果与分析
4.3.1 试验结果
试验过程中,每组试验重复5次,取其平均值作为试验结果,如表2所示。
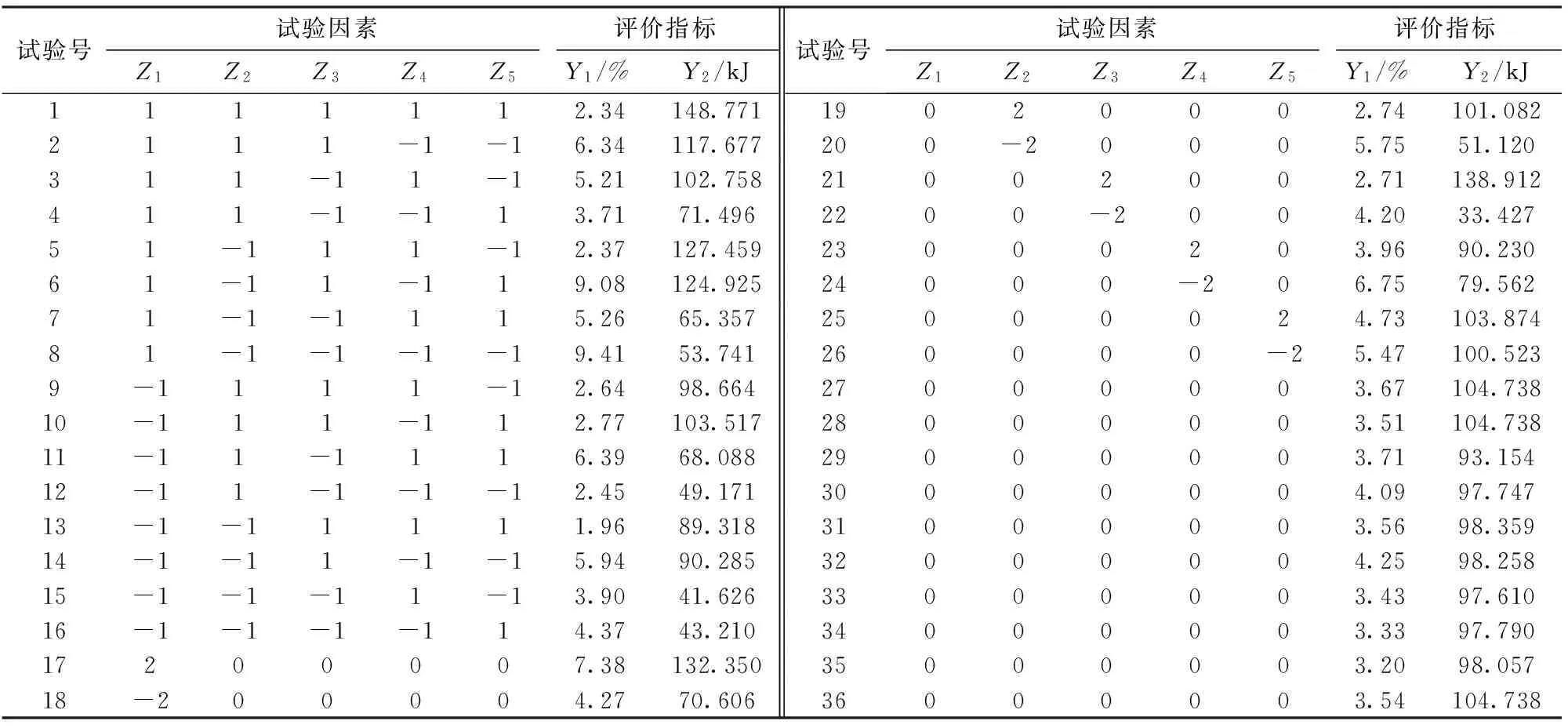
表2 试验方案与结果Tab.2 Experimental plan and results
4.3.2 回归模型的建立与显著性检验
运用Design-Expert软件对表2中数据进行方差分析(显著水平p<0.1),在计算结果的基础上,保证回归模型极显著、失拟项不显著,并逐个将最不显著项的平方和与自由度并入误差项再重新拟合回归模型[18-20],得出试验因素对评价指标影响的简化回归模型
Y1=3.731+0.813Z1-0.686Z2-0.427Z3-0.816Z4-
0.413Z1Z2-0.795Z1Z4-0.219Z1Z5+1.039Z2Z4-
0.978Z3Z4+0.378Z4Z5
(10)
Y2=100.228+14.658Z1+9.339Z2+25.673Z3+
2.862Z1Z3+4.062Z1Z4-3.184Z2Z3+4.051Z2Z4-
2.025Z3Z4+1.975Z3Z5-1.953Z4Z5
(11)
4.3.3 试验因素对评价指标的影响效应分析
在回归模型中,各回归系数的绝对值决定各回归项对评价指标影响[21-22]。根据式(10)、(11)中一次项系数的绝对值可得,各试验因素对变异系数的影响由主到次依次为抄板安装角、筒体转速、物料装载率、混合时间、抄板高度,各试验因素对净功耗的影响由主到次依次为混合时间、筒体转速、物料装载率、抄板安装角、抄板高度。
为了更直观地分析抄板高度、抄板安装角、物料装载率、筒体转速和混合时间对评价指标的影响,根据各回归项显著性顺序及各试验因素对评价指标影响的主次顺序,选取对评价指标影响最为重要的回归项,运用Matlab软件绘制四维切片图来直观描述影响规律[23-24],结果如图10所示。
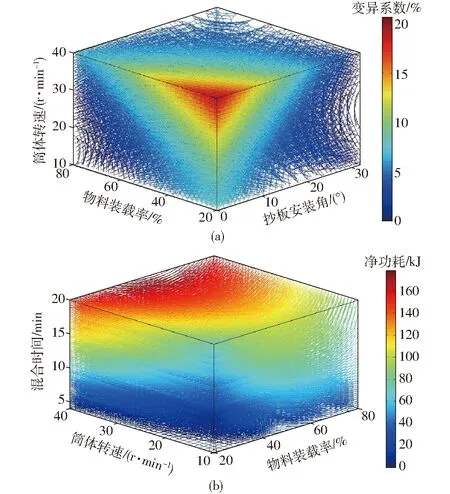
图10 试验因素对评价指标影响的四维切片图Fig.10 Four-dimensional slice diagrams of effects of experimental factors on evaluation indexes
在试验范围内,当混合时间和抄板高度均为零水平时,筒体转速、物料装载率和抄板安装角对变异系数的影响效应如图10a所示。通过观察图10a中颜色分布规律可知:变异系数变大的区域主要集中在同时满足筒体转速取值较大(接近临界转速)、物料装载率和抄板安装角取值均较小时;变异系数最大值出现在筒体转速为40 r/min、物料装载率为20%和抄板安装角为0°时。这是因为:在试验范围内,筒体转速取值接近临界转速时,物料颗粒所受的离心力较大,导致贴附于筒体内壁而与之共转的物料颗粒较多,筒体内物料颗粒间的相对运动减小,物料颗粒相互间变位和渗透的机率减少[2,4,8],物料颗粒间混合运动强度减弱。在试验范围内,物料装载率取值较小时,因物料颗粒下落的高度落差变大(冲击与碰撞较大),使因表面化学性质而粘附在一起、但物理特性差异大的物料颗粒产生离析。在试验范围内,抄板安装角取值较小时,使得抄板及其周边的物料颗粒在被带起后,出现同步抛落(物料颗粒的下落方位相似度较高),不利于物料颗粒抛落时出现交错、分散的剪切面[25],同时因抄板对物料颗粒的轴向推动力较小而使得物料颗粒在筒体内的轴向对流混合运动较弱。
在试验范围内,当抄板安装角和抄板高度均为零水平时,筒体转速、物料装载率和混合时间对净功耗的影响效应如图10b所示。通过观察图10b中颜色分布规律可知:净功耗变大的区域主要集中在同时满足筒体转速取值较大、物料装载率取值较大和混合时间取值较大时;在试验范围内,当物料装载率和混合时间取值一定时,净功耗均随着筒体转速的增加而增大;当筒体转速取值较小(接近10 r/min)、混合时间取值不同时,改变物料装载率,则对应的净功耗变化趋势并不一致,随着物料装载率的逐渐增加,净功耗呈先上升后缓慢下降的变化趋势;在试验范围内,当物料装载率和筒体转速取值一定时,净功耗均随着混合时间的增加而增大。这是因为:在试验范围内,当物料装载率和混合时间取值一定时,随着筒体转速的增加,抄板对物料颗粒的抛撒力增加,物料颗粒运动剧烈程度增大,物料颗粒被提升的高度及物料颗粒间的相对速度均增大,物料颗粒失去平衡的机率增大,需要更大的扭矩来支撑[26],故所需的净功耗增大。在试验范围内,当筒体转速取值较小(接近10 r/min)时,混合时间取值不同时,随着物料装载率的增加,物料颗粒群质量增加,由于混合过程中带动物料颗粒群旋转所需的扭矩(由物料颗粒群质量、质心与筒体中心之间的水平距离共同决定)增大[4,26],则净功耗呈上升的变化趋势,但随着物料装载率的继续增加,物料颗粒群质心与筒体中心之间的水平距离缩短[26],则净功耗呈下降的变化趋势。在试验范围内,当物料装载率和筒体转速取值一定时,随着混合时间的增加,物料颗粒群在筒体周向和轴向上的运动次数增加,势必使净功耗增大。
4.4 参数优化与试验验证
由上述分析可知,各试验因素对各评价指标的影响各不相同,为获得最佳参数组合方案,需要对各评价指标的简化回归模型进行优化求解。
由于变异系数CV是衡量混合性能优劣的主要评价指标,根据日粮混合要求,期望优化结果满足CV≤10%,同时为提高设备有效利用率、降低运行成本,将物料装载率的取值范围设为50%~80%,在此基础上,以筒体转速10~40 r/min、混合时间4~20 min、抄板安装角0°~32°、抄板高度63~127 mm为约束条件,以评价指标最小为优化目标,以评价指标的简化回归模型为目标函数,建立非线性规划的数学模型,并运用Design-Expert软件的优化模块对其进行优化求解,最终从多种参数优化结果中选取最佳组合方案为:筒体转速23.53 r/min、物料装载率64.51%、混合时间4 min、抄板安装角10.91°、抄板高度108.54 mm,此时对应的变异系数、净功耗预测值分别为1.97%、33.160 kJ。
为检验简化回归模型与最佳组合方案的可靠性,对上述最佳组合方案进行试验验证(与表2中各组试验的操作条件相同)。同时考虑到试验因素水平值的可操作性,将上述最佳组合方案修正为:筒体转速23.5 r/min、物料装载率65%、混合时间4 min、抄板安装角11°、抄板高度109 mm,在此优化方案下进行试验验证,重复5次,结果取其平均值,得出此时变异系数、净功耗分别为2.09%、33.734 kJ。与优化前无抄板机型的最佳参数组合对应的变异系数、净功耗相比,分别降低了64.4%和15.1%。通过对比分析各评价指标的实测值与由简化回归模型得出的预测值可知,两者基本吻合,这说明简化回归模型与最佳组合方案均是可靠的,均具有较高的工程实用性和指导意义,并可用简化回归模型对不同工况下回转式日粮混合机的变异系数与净功耗进行分析和预测。
5 结论
(1)基于日粮饲养技术在各种规模牛场的应用现状,设计了一种回转式日粮混合机,其核心部件为内壁安装有反向配置抄板的回转筒体。由回转筒体关键参数分析及其混合过程高速摄像分析结果可知,按筒体内物料颗粒群运动特征可将物料分布区域划分为提料区、抛落区、回料区,其中提料区内物料以剪切混合为主,抛落区(主混合区)内物料以剪切混合为主、以扩散与对流混合为辅,回料区内物料以对流混合为主。各个区域的位置、大小、形状受结构和运行参数的影响很大。
(2)由混合性能试验可知,各试验因素对变异系数的影响由主到次依次为抄板安装角、筒体转速、物料装载率、混合时间、抄板高度,各试验因素对净功耗的影响由主到次依次为混合时间、筒体转速、物料装载率、抄板安装角、抄板高度;确定最佳参数组合方案为:筒体转速23.5 r/min、物料装载率65%、混合时间4 min、抄板安装角11°、抄板高度109 mm,此时变异系数、净功耗分别为2.09%、33.734 kJ,比优化前分别降低了64.4%和15.1%。
1 杨膺白.TMR日粮与现代饲养观念和技术的结合[J].中国草食动物,2009,29(5):54-55.
2 王德福,王吉权.单卧轴全混日粮混合机的试验[J].农业机械学报,2008,39(6):205-207.
3 陈伟旭,刘希峰,李含锋.卧式全混合日粮机工作装置的设计[J].农机化研究,2007(4):84-86. CHEN Weixu, LIU Xifeng, LI Hanfeng. Working device of the horizontal completed mixing ration machine[J]. Journal of Agricultural Mechanization Research, 2007(4): 84-86. (in Chinese)
4 于克强.转轮式全混合日粮混合机混合机理分析及试验研究[D].哈尔滨:东北农业大学,2015. YU Keqiang. Experimental study and mechanism analysis of paddle-wheel total mixed ration mixer[D]. Harbin: Northeast Agricultural University, 2015. (in Chinese)
5 BUCKMASTER D R, WANG D, WANG H. Assessing uniformity of total mixed rations[J]. Applied Engineering in Agriculture, 2014, 30(5): 693-698.
6 BUCKMASTER Dennis. Optimizing performance of TMR mixers[J]. Tri-State Dairy Nutrition Conference, 2009, 21(22): 105-117.
7 王德福,蒋亦元.双轴卧式全混合日粮混合机的试验研究[J].农业工程学报,2006,22(4):85-88. WANG Defu, JIANG Yiyuan. Experimental study on the twin-shaft horizontal total mixed ration mixer[J]. Transactions of the CSAE, 2006, 22(4): 85-88. (in Chinese)
8 刘江涛,张志杰.单轴卧式全混日粮混合机加工性能试验研究[J].西北农林科技大学学报:自然科学版,2009,37(7):218-222,228. LIU Jiangtao, ZHANG Zhijie. Study on characteristics of the single-shaft horizontal total mixed ration mixer[J]. Journal of Northwest A&F University: Natural Science Edition, 2009, 37(7): 218-222, 228. (in Chinese)
9 王德福.双轴卧式全混合日粮混合机的混合机理分析[J].农业机械学报,2006,37(8):178-182. WANG Defu. Analysis of mixing principle on twin-shaft horizontal total mixed ration mixer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(8): 178-182. (in Chinese)
10 霍丽丽,赵立欣,田宜水,等.生物质颗粒燃料成型的黏弹性本构模型[J].农业工程学报,2013,29(9):200-206. HUO Lili, ZHAO Lixin, TIAN Yishui, et al. Viscoelastic constitutive model of biomass pellet[J]. Transactions of the CSAE, 2013, 29(9): 200-206. (in Chinese)
11 欧阳鸿武,何世文,廖奇音,等.圆筒型混合器中颗粒混合运动的研究[J].中南大学学报:自然科学版,2004,35(1):26-30. OUYANG Hongwu, HE Shiwen, LIAO Qiyin, et al. Research on granular mixing in rotating drum blender[J]. Journal of Central South University: Science and Technology, 2004, 35(1): 26-30. (in Chinese)
12 耿凡,徐大勇,袁竹林,等.滚筒干燥器中颗粒混合运动的三维数值模拟[J].应用力学学报,2008,25(3):529-534. GENG Fan, XU Dayong, YUAN Zhulin, et al. Three dimensional numerical simulation of mixing process of particles in rotary dryer[J]. Chinese Journal of Applied Mechanics, 2008, 25(3): 529-534. (in Chinese)
13 朱立平,秦霞,袁竹林,等.丝状颗粒在滚筒横向截面中的传热传质特性[J].东南大学学报:自然科学版,2014,44(4):756-763. ZHU Liping, QIN Xia, YUAN Zhulin, et al. Heat and mass transfer characteristics of filamentous particles in transverse section of rotary dryer[J]. Journal of Southeast University: Natural Science Edition, 2014, 44(4): 756-763. (in Chinese)
14 谢传锋,王琪.理论力学[M].北京:高等教育出版社,2009.
15 郭冬生,彭小兰.不同精粗比全混合日粮对奶牛产奶性能和牛奶品质的影响[J].西南农业学报,2011,24(1):297-300. GUO Dongsheng, PENG Xiaolan. Effects of different ratio of concentrate and roughage in total mixed ration on milk yield and quality in dairy cows[J]. Southwest China Journal of Agricultural Sciences, 2011, 24(1): 297-300. (in Chinese)
16 蒋恩臣.畜牧业机械化(第四版)[M].北京:中国农业出版社,2011.
17 董欣,刘立意,李文哲,等.卧辊式玉米秸秆调质装置调质功耗试验[J/OL].农业机械学报,2012,43(增刊):198-201.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2012s39&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2012.S0.039. DONG Xin, LIU Liyi, LI Wenzhe, et al. Power consumption experiment of corn straw adjusting material device based on horizontal roller[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Supp.): 198-201. (in Chinese)
18 吕金庆,尚琴琴,杨颖,等.马铃薯杀秧机设计优化与试验[J/OL].农业机械学报,2016,47(5):106-114,98.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160515&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2016.05.015. LÜ Jinqing, SHANG Qinqin, YANG Ying, et al. Design optimization and experiment on potato haulm cutter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 106-114, 98. (in Chinese)
19 陈海涛,明向兰,刘爽,等.废旧棉与水稻秸秆纤维混合地膜制造工艺参数优化[J].农业工程学报,2015,31(13):292-300. CHEN Haitao, MING Xianglan, LIU Shuang, et al. Optimization of technical parameters for making mulch from waste cotton and rice straw fiber[J]. Transactions of the CSAE, 2015, 31(13): 292-300. (in Chinese)
20 杨然兵,杨红光,尚书旗,等.拨辊推送式马铃薯收获机设计与试验[J/OL].农业机械学报,2016,47(7):119-126.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160717&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2016.07.017. YANG Ranbing, YANG Hongguang, SHANG Shuqi, et al. Design and test of poking roller shoving type potato harvester[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 119-126. (in Chinese)
21 杨然兵,范玉滨,尚书旗,等.4HBL-2型花生联合收获机复收装置设计与试验[J/OL].农业机械学报,2016,47(9):115-120,107.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160917&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2016.09.017. YANG Ranbing, FAN Yubin, SHANG Shuqi, et al. Design and experiment of twice-receiving device on 4HBL-2 peanut combine[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 115-120, 107. (in Chinese)
22 张中典,张大龙,李建明,等.黄瓜气孔导度、水力导度的环境响应及其调控蒸腾效应[J/OL].农业机械学报,2016,47(6):139-147.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160618&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2016.06.018. ZHANG Zhongdian, ZHANG Dalong, LI Jianming, et al. Environmental response of stomatal and hydraulic conductances and their effects on regulating transpiration of cucumber[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6): 139-147. (in Chinese)
23 胡志超.半喂入花生联合收获机关键技术研究[D].南京:南京农业大学,2011. HU Zhichao. Study on key technologies of half-feed peanut combine harvester[D]. Nanjing: Nanjing Agricultural University, 2011. (in Chinese)
24 张良均,杨坦,肖刚,等.MATLAB数据分析与挖掘实战[M].北京:机械工业出版社,2015.
25 潘健平.带倾斜抄板的水平转鼓内的颗粒输送特性研究[D].北京:清华大学,2006. PAN Jianping. Study on granule transport in a horizontal drum with inclined flights[D]. Beijing: Tsinghua University, 2006. (in Chinese)
26 付开进.大型半自磨机磨矿性能仿真及参数优化[D].长春:吉林大学,2016. FU Kaijin. Simulation and parameter optimization on grinding performance of large-type SAG mill[D]. Changchun: Jilin University, 2016. (in Chinese)
Mixing Process Analysis and Performance Experiment of Rotary Ration Mixer
LI Liqiao WANG Defu LI Chao
(CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China)
In order to overcome the shortcomings of the traditional feeding method, the feeding industry of ruminant gradually adopts the ration feeding technology that mixes the nutrient formula of roughage, concentrate and various additives uniformly. The models of foreign ration mixers tend to serialization and automation, but there are disadvantages such as high price, large power, and strong technical confidentiality, which limit the popularization and application of foreign ration mixers in China. Considering the shortage of mechanism study and innovative research of ration mixers, and the actual needs of animal husbandry in China, for promoting the application of ration feeding technology in China, a rotary ration mixer was designed. In order to reveal the mixing mechanism, the rotary ration mixing experimental device was designed and used to observe and analyze the mixing process by the high-speed photography technology. According to the movement characteristics of material particle group in the drum, the material distribution area was divided into material lifting area, dropping area and material returning area. The dropping area was the main mixing area, in which materials were mixed by main shear mixing and auxiliary spread mixing and auxiliary convective mixing. The location, size and shape of each area were affected by the structural and operating parameters. At the same time, the experimental ration was chosen according to the forage-concentrate ratio of 35∶65 (based on dry matter content). Rotary speed of the drum, loading rate of materials, mixing time, inclination angle of the shoveling plate and height of the shoveling plate were used as experimental factors, coefficient of variation and net power consumption were used as evaluation indexes, the method of orthogonal rotational combination experiment of five factors and five levels was used to carry out the optimization experiment of performance. The experimental results showed that coefficient of variation was 2.09% and net power consumption was 33.734 kJ under the conditions that rotary speed of the drum was 23.5 r/min, loading rate of materials was 65%, mixing time was 4 min, inclination angle of the shoveling plate was 11°, and height of the shoveling plate was 109 mm. The results could provide reference for the research and development of ration mixers.
ration mixer; rotary type; shoveling plate; mixing mechanism; experiment
10.6041/j.issn.1000-1298.2017.08.013
2016-12-15
2017-02-23
国家重点研发计划项目(2016YFD0701300)和国家自然科学基金项目(51405076)
李利桥(1988—),女,博士生,主要从事畜牧机械研究,E-mail: liliqiao1108@163.com
王德福(1964—),男,教授,博士生导师,主要从事畜牧机械研究,E-mail: dfwang0203@163.com
S816.34; S817.12
A
1000-1298(2017)08-0123-10
