一种适用于多个可转位刀片的周边刃边缘检测方法
2017-06-26陈宇彤叶军君陈彬强孙维方李凌祥
陈宇彤,叶军君,陈彬强,孙维方,李凌祥
(1.厦门大学航空航天学院,福建厦门361005;2.厦门金鹭特种合金有限公司,福建厦门361000)
一种适用于多个可转位刀片的周边刃边缘检测方法
陈宇彤1,叶军君1,陈彬强1,孙维方1,李凌祥2
(1.厦门大学航空航天学院,福建厦门361005;2.厦门金鹭特种合金有限公司,福建厦门361000)
针对可转位刀片周边刃边缘检测的问题,提出了一种适用于多个可转位刀片的基于局部模糊检测和双树复小波变换的边缘检测算法。该算法主要分为两步,第一步是先按事先规定的要求拍摄可转位刀片的图片,然后对拍好的图片进行局部模糊检测处理,其中的检测算法是以图片中像素的相关性系数和基于Laplacian算子的新型判别算子为评价指标判断其是否位于模糊区域(若位于模糊区域,则用白色显示它,反之,则用黑色显示)。模糊检测算法在剔除误检像素后最后会生成一副二值图,可转位刀片的周边刃边缘即为二值图中黑色区域和白色区域的交界线。第二步就是用双树复小波变换对二值图进行边缘检测,检测后的结果就是我们需要的结果。实验结果证明,该算法能准确快速地检测出多个可转位刀片的周边刃边缘。
可转位刀片;周边刃;边缘检测;局部模糊检测;双树复小波变换
在现代制造技术中,可转位刀具作为高档刀具发挥着越来越重要的作用,可转位刀片作为可转位刀具的关键功能元件,其周边刃加工精度对可转位刀具的切削效率有着重要的影响,而提高可转位刀片加工精度就需要先对周边刃刀片几何参数进行准确测量,故提高可转位刀片的检测水平,对于生产可转位刀具有着极其重大的意义。目前,国内外常用的测量方法主要分为两类:接触式测量和非接触式测量[1]。接触式测量测量方式简单直观,但会有侧头磨损引起的误差,要备有防损伤措施的低速低效运动。随着制造技术的发展,这种测量方法已无法满足现代制造的需求,故高效、高精度、无损伤的非接触式测量方法应运而生,这其中应用到刀片测量的主要有光学测量法。它利用光学原理对刀片表面轮廓形状进行测量,具有精度高、速度快等优点。其测量方式也是多种多样,有激光三角法、干涉测量法、图像测量法等等[2]。本文对可转位刀片几何参数进行测量采用的是图像测量法,其第一步也是最关键的一步就是对可转位刀片周边刃的边缘进行检测,因为图像边缘反映了图像的最基本特征,是图像信息最集中的地方[3]。
在机器视觉中,边缘被定义为图像中灰度发生剧烈变化的像素点所构成的集合。对于特定的图像,传统边缘检测方法主要有Robert算子、Sobel算子、Canny算子、Laplacian算子等。每种算子特点各异,且适用范围不尽相同[3]:Robert算子和Sobel算子是一阶微分检测算子,梯度计算相对简单,但对噪声较敏感,抗噪能力较差,容易将噪声误检测为边缘;Canny算子、Laplacian算子是二阶微分检测算子,Laplacian算子对噪声很敏感,故常常采用对Laplacian算子进行改进后的LOG算子[4];Canny算子因其具有较好的检测质量,且有定位精度高、误判率低等这些特点,故被认为是目前最成功的和使用最广泛的边缘检测方法之一[5]。
目前,针对可转位刀片的边缘检测算法有个共同的不足就是只能对一块刀片进行检测,还无法同时检测同一图片下多个刀片的边缘,且在图片受到噪声严重污染时检测精度将会受到很大的影响,所以有必要提出一种更行之有效的检测算法。由相机的成像原理可知,位于相机景深范围之内的物体点在照片上形成清晰的像点,而位于景深范围外的则形成模糊的像点。根据这个原理,在对刀片进行拍照时,可以选用景深较小的摄像头(因为刀片厚度小)使得刀片的前刀面本身成像成清晰的区域,而其他地方成像成模糊的区域(即照片的背景),这样可转位刀片的边缘就是清晰区域和模糊区域的分界线。鉴于此,本文将提出一种基于局部模糊检测和双树复小波变换的边缘检测算法,其中局部模糊检测采用了结合频域自相关系数[6]和基于Laplacian算子的新型判别算子来判断图像中的像素位于模糊区域或者清晰区域的新算法。此边缘检测算法不仅仅适用于单个刀片,还可以把它运用到同一图片下的多个刀片,工业上具有广阔的应用前景。更重要的是,实验结果表明该算法能准确快速的检测出多个刀片的边缘。
1 局部模糊检测
1.1 图像模糊的数学模型
模糊图像在数学上一般可以表示为初始清晰图像和模糊函数(点扩散函数)的卷积,具体的公式如下所示:

这里b(j,k)((j,k)∈Db),c(j,k)((j,k)∈Dc)分别表示模糊图像和初始清晰图像,h(j,k)((j,k)∈Dh)表示模糊函数(点扩散函数),Db、Dc、Dh分别为它们的定义域。
1.2 自相关系数[6]
假设c1(j,k),c2(j,k)分别为模糊图像中两个大小相等的随机块,它们的初始清晰图像块是b1(j,k),b2(j,k),则由公式(1)可得:

对公式(2)两边做傅里叶变换并同取绝对值,得:

最后对公式(3)两边取对数,得:
其中Corr(·)为两矩阵的相关性系数,即

式中:Xmn、Ymn分别为矩阵X和Y的各元素X軍、Y軍为X和Y的平均值。
由关系式(6)可知:相关性系数是描述两个量之间的线性相关程度,局部模糊区域中的像素由于像素的重叠,故模糊区域内的像素一般具有较大的相关性系数,而其他较为清晰的区域则一般相关性系数较小。至此,就可以把整张图像的像素划分为两类:(j,k)∈R1为模糊部分,(j,k)∈R2为较清晰部分。判断点(j,k)是属于R1还是R2的具体算法如下:
(1)先把以(j,k)为中心的大小为(2N-1)×(2N-1)的矩形领域平均分为四小块(X1,X2,X3,X4),每小块的大小为N×N,具体如图1所示。
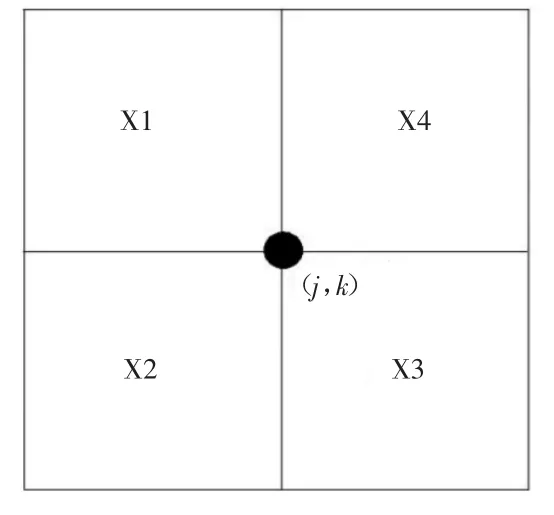
图1 局部领域块的划分
(2)计算各块对应的频域对数系数X軒1(h,v),X軒2(h,v),X軒3(h,v),X軒4(h,v),然后再计算对角领域块的相关性系数:
(3)将Corr(j,k)同预设的阀值C1作比较,并根据比较结果生成二值图B.若Corr(j,k)>C1,则像素点(j,k)∈R1,B(j,k)=1;反之,则像素点(j,k)∈R2,B(j,k)=0.
1.3 基于Laplacian算子的判别算子
由图像处理的知识可知,Laplacian算子值的大小可以直接反映相邻像素间灰度变化的快慢。局部模糊区域中相邻像素间的灰度变化往往比较缓慢,而清晰或者含锐利边缘的区域相邻像素间的灰度变化则相对较快。基于这一点,可以通过改造拉普拉斯算子而得到一个新的算子来判定模糊。下面开始定义这个算子,并逐步说明具体的判定算法。
首先,在以像素(j,k)为中心、大小为K×K的矩形领域S内,定义如下算子:
其中,K为奇数,f(j,k)为像素(j,k)的灰度值。
接着,设整副图像像素区域T的大小为M×N.在T内再定义一个类似于(8)式的全局算子:
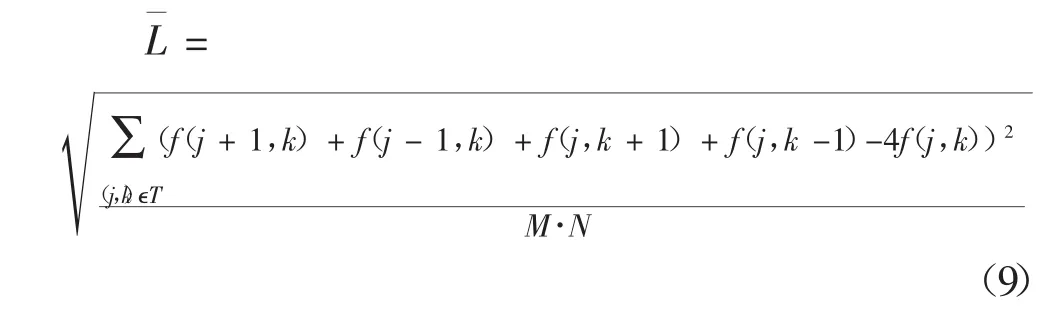
最后,为了减小误差,采用(10)式作为像素(j,k)的模糊测度:

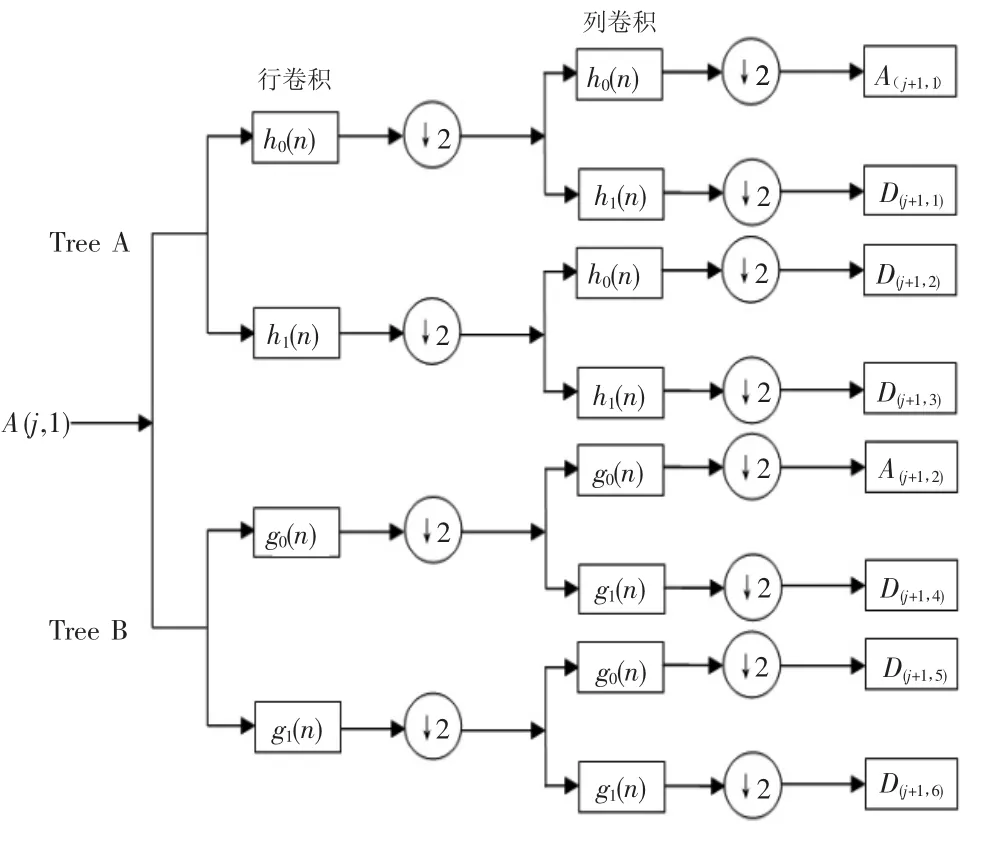
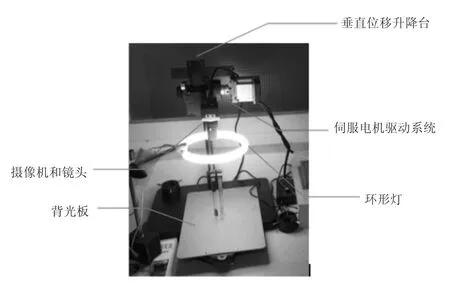
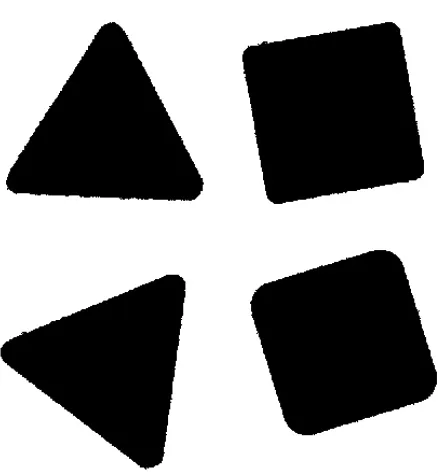
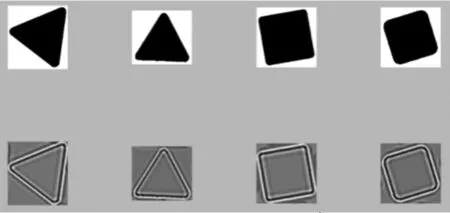
设T1为预设的阀值,当q 1.4 模糊区域检测算法 由于图像的具体类型是多种多样的,所以单独使用自相关系数或者基于拉普拉斯算子的新型判别算子来判定模糊带有一定的局限性,检测效果往往也不尽如人意。故有必要把这两个模糊指标结合起来共同判定模糊以获得更好的检测效果。根据最终判决结果生成的二值图B,可以认为白点聚焦较多的区域为模糊区域。为减小误差,可进一步采用以下的方法对判决结果做消除误检像素点的处理[6]: 设(x,y)为二值图B中非零的像素点,在以它为圆心、半径为R的区域D内,如果模糊点个数满足式子(11),则B(x,y)=1;反之,B(x,y)=0. 其中,H为区域D中的像素点总数,T2为预设的阀值。 局部模糊区域检测的具体算法如下: (1)根据1.2节的算法计算整副图像f(x,y)的频域对数相关性系数Corr(x,y). (2)算出使得自相关系数Corr(x,y)满足1.2节阀值条件的所有像素点(j,k)(对于其它不满足阀值条件的像素点(j′,k′),都认为(j′,k′)∈R2,即B(j′,k′)=0). (3)对于(2)中的像素(j,k),根据1.3节的算法进一步计算其模糊测度q(j,k),若q(j,k)<T1,则点(j,k)∈R1,B(j,k)=1;否则(j,k)∈R2,B(j,k)=0. (4)消除二值图B中的误检像素。 通过上述的局部模糊检测算法,可以得到一副刀片前平面用黑色显示,背景用白色显示的二值图,刀片周边刃的边缘即为这幅二值图中黑色区域和白色区域的交界线。 2.1 DWT及其缺陷 DWT,即离散小波变换,是时频分析一个非常强大的工具。由于其采用多分辨率的方法,通过伸缩和平移运算对信号进行多尺度细化,能自动适应时频信号分析的要求,故可以聚焦到信号的任何细节,因而被称为“数学显微镜”[7]。然而,它本身存在的一些缺陷却大大限制了其在实际工程中的应用: (1)不具有平移不变性。这将造成只要信号平移一段微小的距离,各尺度上小波系数的能量分布就会发生较大的变化。 (2)缺乏方向选择性。传统的离散小波变换方向分辨率较低,小波变换系数只能表示三个空间方向的信息,即水平、垂直和对角线三个方向。 (3)会产生Gibbs效应。由于分解和重构滤波器发生震荡,故在图像边缘会有伪轮廓的产生,主要表现为震铃和锯齿。 2.2 双树复小波变换(DTCWT) 为了克服DWT所存在的种种缺陷,Kingsbury[8]于1999年提出了双树复小波变换(Dual-tree Complex Wavelet Transform,DTCWT)。它除了保持传统小波变换多分辨率特性和较好的时频局部化分析能力外,还具有以下优点: (1)近似的平移不变性。信号的平移基本不会使各尺度上小波系数的能量分布发生变化。 (2)良好的方向选择性。它能提供6个空间方向的信息,故能更好的描述图像的方向属性。 (3)有限的数据冗余。 (4)完全重构性。使用短的线性相位的滤波器组就可以实现完全重构。 双树复小波变换(DTCWT)采用两棵离散小波树的结构形式,一棵代表变换后的实部,另外一棵代表变换后的虚部,通过这两棵树并行实现实部和虚部的运算,如图2所示。 图2 二维双树复小波变换的分解 从图2可知,将每一级分解后除可以得到两个低频分量A(j+1,1)和A(j+1,2)外,还可以得到6个不同的高频分量D(j+1,m),m=1,...,6,同时无论二维双树复数小波变换分解树有多深,其总体数据冗余都为4∶1,故这6个处于同一分解层的高频分量对应了图像中6个不同方向的信息(±15°,±45°,±75°)。由于其比DWT变换多了3个方向,因此双树复小波变换可显著提高图像分解与重构的精度并能更好的保留图像的细节信息,如边缘等。 验证实验平台如图3示,垂直位移升降台由伺服电机驱动系统控制进行对焦位置的判定和视野的吊证,环形灯用于对被测件进行打光操作,背光板用于进行高对比度影像的获取。 图3 实验系统 实验中,首先把待检测的刀片放到背光板上以供拍照,然后对镜头调焦,使得刀片前刀面在图片上所呈现的像清晰,而其他背景信息所呈现的像模糊,具体拍摄出的图片如图4所示。接着对图片进行图像处理以检测刀片的边缘。这其中计算像素相关性系数的四领域尺寸为N=5,计算新型判别算子的窗口尺寸为K=3.根据文献[1]中的大量实验统计可知,大部分模糊像素的相关性系数集中在(0.8,0.95)之间。因此本文也选取该相关性系数范围进行模糊像素的搜寻,当同时满足q 图4 实验所拍下的原始图片 图5 局部模糊检测后的图片 图6双树复小波变换后的图片 图6 所示为应用本文所提方法而进行的刀片的缘轮廓曲面,如图所示,该方法能够准确地检验出刀片的边缘轮廓曲线,与传统方法对比可得该方法能够同时对影像视野内的多个刀片同时进行尺寸校验和加工检测。较之常用的Robert算子和Sobel算子该方法更能够有效地避免多点边缘轮廓等问题。 综上所述,本文所述方法能够快速准确检测出多个可转位刀片周边刃的边缘轮廓信息,且刀片周边刃边缘清晰具体,为之后的尺寸检测和刀片加工质量的检验提供了一个良好的基础。 本文针对目前可转位刀片边缘检测方法只能检测一块刀片的不足,提出了一种适用于多个可转位刀片的边缘检测算法。该算法主要分为局部模糊检测和双树复小波变换两部分:先用局部模糊检测把事先拍好的图片(刀片前刀面区域清晰、背景区域模糊)作模糊检测并生成二值图(刀片前刀面显示为黑色、背景区域显示为白色),紧接着再对二值图作双树复小波变换后就可以马上检测到多个可转位刀片的边缘(用黑色条纹表示)。实验结果表明,用这个方法可以准确可靠地检测出多个可转位刀片周边刃的边缘,且没有发生误判的情况。 [1]朱德华.接触式测量技术和非接触式测量技术的融合[J].技术与市场,2012,19(5):171-171. [2]罗琪.可转位刀片磨削误差测量及其补偿技术[D].厦门:厦门大学,2016. [3]尚雅层,陈静,田军委.亚像素边缘检测算法在刀具参数检测中的应用[J].计算机工程与科学,2011,33(4):107-109. [4]Marr D,Hildreth E.Theory of edge detection[J].Proceedings of the Royal Society of London B:Biological Sciences,1980,207(1167):187-217. [5]曾俊.图像边缘检测技术及其应用研究[D].武汉:华中科技大学,2011. [6]王睿,方勇.一种图像局部模糊检测方法及其在被动图像认证中的应用[J].高技术通讯,2009,19(7):718-723. [7]王婷君.基于双树复小波和NPSO的医学图像配准方法研究[D].沈阳:东北大学,2009. [8]Kingsbury N.Complex wavelets for shift invariant analysis and filtering of signals[J].Applied and computational harmonic analysis,2001,10(3):234-253. A PeripheralEdge Detection Method forMultiple Indexable Inserts CHEN Yu-tong1,YE Jun-jun1,CHEN Bin-qiang1,SUNWei-fang1,LILing-xiang2 As for the problem of peripheral edge detection for indexable inserts,this paper propose an algorithm of edge detection based on local-blur detection and dual-tree complex wavelet transform formultiple indexable inserts.The algorithm have two steps:the first step is to take pictures of indexable inserts according to the requirements specified in advance firstly,and then make local-blur detection in the picture which was been taken,here the algorithm of edge detection judge whether the pixel is in the blur area with the correlation coefficients of the pixel in the picture and the new operator based on laplacian operator as evaluation indexs(if it is in the blur area,show it in white;otherwise,show it in black).After eliminating the mistake pixels,the last step of the algorithm of edge detection will create a binary image,the peripheral edge of indexable inserts are the demarcation lines between white areas and black areas in the binary image.The second step is to detect the edges in binary image by using dual-tree complex wavelet transform,the result ater transform is that we need.Experimental results show that thismethod can detect the peripheral edge ofmultiple indexable inserts quickly and accurately. indexable inserts;peripheral edge;edge detection;local-blur detection;dual-tree complex wavelet transform TH741 A 1672-545X(2017)04-0158-05 2017-01-16 闽发改投资[2016]482号 陈宇彤(1990-),男,福建泉州人,硕士研究生,主要研究方向为机器视觉、机械磨损及图像处理;叶军君(1962-),男,福建莆田人,博士,副教授,主要从事CAD/CAM技术及协同设计技术方面的研究;陈彬强(1986-),男,福建厦门人,博士,助理教授,研究方向为复杂曲面加工制造、结构健康监测;孙维方(1988-),男,湖北襄阳人,博士研究生,主要研究方向为复杂曲面成形及测量、图像处理;李凌祥(1970-),男,福建安溪人,硕士,教授级高工,研究方向为精密制造。
2 双树复小波
3 实验结果与分析

4 结束语
(1.School of Aerospace Engineering,Xiamen University,Xiamen Fujian 361005,China;2.Xiamen Golden Egret Special Alloy Co.,Ltd.,Xiamen Fujian 361000,China)
