铁水车悬架电液比例系统模糊PID控制研究
2017-06-26贺利乐耿会良
谢 明,贺利乐,耿会良
(1.西安建筑科技大学,陕西西安710055;2.中冶宝钢技术服务有限公司,上海200941)
铁水车悬架电液比例系统模糊PID控制研究
谢 明1,2,贺利乐1,耿会良2
(1.西安建筑科技大学,陕西西安710055;2.中冶宝钢技术服务有限公司,上海200941)
铁水车悬架系统一般使用电液比例实现升降操作且要求实现平稳精准控制,如果采用经典PID控制虽然简单、可靠、鲁棒性好,但由于其工况负载会波动较大,单一的数据整定无法针对车辆的实际使用工况作出适当调整导致控制性能欠佳,为了改善这一状况,本文研究了铁水车液压悬架控制系统的传递函数并引入模糊控制理论,将模糊控制理论与经典PID控制相结合并设计了模糊自整定PID控制器,实现了对PID控制参数的在线整定,MATLAB/Simulink仿真结果表明铁水车悬架电液比例系统采用模糊PID控制具有更好的动态性能。
铁水车;电液比例;模糊PID控制
随着土地资源的紧缺,许多冶炼企业改变铁路运输工艺,改用投资小、占地少的无轨运输设备工艺来代替火车运输,铁水运输车(简称“铁水车”)自然就成为许多冶炼企业必备运输工具[1]。
铁水车在运输铁水的过程中需要对铁水包实现平稳、精确的位置升降运动,因此在其底盘悬架设计中采用液压油缸作为承压和升降部件,另外考虑到铁水温度高达1 600℃,为确保在高温、高粉尘、高噪声下悬架升降系统达到预期要求,那么对其悬架油缸升降系统的电液控制精度和灵活程度提出了更高要求,目前常规控制方法很难满足铁水车在运输铁水过程中的全部性能要求[2]。目前,要实现精准控制有许多先进的算法,然而无论采用哪种控制算法其最终都是通过控制升降系统中的比例阀来达到实现升降的目的,因此提高铁水车悬架升降系统中电液比例系统的响应速度和精度变得尤为重要。
电液比例系统是典型的非线性时变系统,常用在液压二次调节加载控制、液压机械手、电液位置伺服控制等方面[3]。而常规的控制方法不能满足控制精度和灵活性等要求。故本文采用模糊PID控制方法,通过模糊控制器对PID参数进行在线整定,通过建立该系统的数学模型并利用MATLAB/Simulink进行仿真对比分析模糊PID和传统PID的控制效果[4,5]。
1 铁水车悬架电液比例系统组成
1.1 铁水车悬架电液比例升降系统介绍
本文所述的铁水车悬架电液比例系统是指其悬架机构所采用的电液比例控制的升降机构,该升降机构可设计为四组支撑或三组支撑,根据不同的用途选择不同的支撑组,其中四组支撑分为左前悬架支撑、右前悬架支撑、左后悬架支撑、右后悬架支撑,每一组悬架支撑升降机构可能由多个轮组构成,具体根据铁水车辆的载重配置情况而定。
在控制上,四组悬架的升降机构原理相同,每组悬架支撑分别由控制器输出、比例阀、升降油缸、位移传感器组成,见图1.

图1 单轮组悬架升降机构
由于每个轮组悬架升降机构相对独立,因此悬架油缸的升降系统的控制也各自形成独立的位置控制系统,本文选择任意一组悬架升降油缸的控制作为研究对象,通过分析该悬架升降控制系统的原理并推导其传递函数,并设计了模糊PID控制器。
1.2 铁水车悬架电液比例系统原理
铁水车悬架电液比例升降系统主要是对系统中比例方向阀、液压油缸进行控制,使悬挂在整个工况下升降平缓、响应快、稳定可靠,该悬架结构的电液举升系统原理框图2所示。

图2 铁水车单轮组悬架电液系统原理框图
从图2知该悬架升降系统由可编程控制器、电液比例阀、升降油缸、位置传感器组成。而电液比例系统是典型的非线性、时变系统,如果采用经典PID控制方法一般难以满足其对精度、速度要求,因此本文提出引入模糊控制理论,将模糊控制理论与经典PID控制相结合,设计模糊PID控制器,通过模糊控制器实现对PID控制参数进行在线自整定,提高系统响应性能[2]。
2 铁水车悬架电液比例系统传递函数
从上文分析可知铁水车悬架电液比例系统通过控制比例阀的开度来实现对油缸的升降速度并时刻检测油缸的位移量对油缸伸缩量进行反馈的位置闭环控制,下面分析并推导出该系统的传递函数。
2.1 悬架中电液比例方向阀的传递函数
系统中采用ParkerM400LS电液比例方向阀,该阀块能够通过控制滑阀的开度精确地进行流量调节。在大多数的电液比例控制中,比例阀的动态响应往往高于动力元件的动态响应,为了简化系统的动态特性以及方便分析与计算,通常对其传递函数进行简化,一般采用二阶震荡环节进行表示,如果二阶环节的固有频率高于动力元件的固有频率还可以直接用一阶系统甚至比例环节估算,在本文中采用二阶环节进行研究,其传递函数可近似由下式进行估算:

式中,Ksv为比例阀流量增益;ωsv为比例阀的固有频率;ζsv比例阀阻尼比。
2.2 悬架升降油缸的传递函数
铁水车悬架升降油缸是该升降系统的执行机构,它通过把阀块传递过来的压力油转换为活塞杆的升降运动,一般情况下油缸的负载仅需考虑其惯性负载,弹性负载不予考虑。
通过对传递函数进行相应的简化后,铁水车悬架升降油缸可视为一个三阶系统,可近似采用如下式估算:

式中,AP为液压油缸有效作用面积;Kq为流量增益;ωh为液压油缸固有频率;ζh为比例阀阻尼比。
2.3 铁水车悬架电液比例系统的传递函数
根据经典控制理论,该系统的开环传递函数如下

式中,AC为可编程控制器的放大增益。
把(1)、(2)代式(3)整理后可得系统开环传递函数为:

3 铁水车悬架电液比例系统模糊PID控制研究
3.1 模糊PID控制原理
经典PID控制被大量应用到工业上,并取得了较好的控制效果,但由于经典PID控制器中参数Kp、Ki、Kd一旦整定,系统即按此控制参数进行相关调整,但对于系统中具有滞后、扰动、时变的控制对象,PID控制显然不能满足不同工况下的控制要求。而把模糊控制器中引入PID控制策略中,能够有效改善控制系统的动、静态特性。
模糊PID控制器以偏差e和偏差变化率ec作为输入,可以满足不同时刻偏差e和偏差变化率ec对PID参数的整定要求,提高了PID控制算法的适应性,模糊自整定PID控制器的原理框图如图3所示。

图3 模糊PID控制原理框图
从图3中可知模糊自整定PID控制的原理是利用偏差e和偏差变化率ec作为模糊控制器的输入,经过模糊化处理后再进行模糊推理后把相应的输出加到原来的PID控制环节上对参数进行校正,从而满足不同的控制要求。因此模糊自整定PID控制中需找出PID控制中三个参数Kp、Ki、Kd与偏差e和偏差变化率ec的关系,式(4):

3.2 铁水车液压悬架电液系统模糊PID控制器设计
铁水车液压悬架电液比例升降系统的模糊控制器中输入量为偏差e、偏差变化率ec,输出量是控制增量△Kp/△Ki/△Kd.
首先需分析系统中针对PID控制误差和误差变化率的允许范围,通过量化因子把它们从基本连续论域转换为离散的n档,即把精确范围[-n,n]的数转换到{-n,-n+1,0,n-1,n}的离散论域,根据该系统要求,被离散化转换后的e、ec、Kp、Ki、Kd离散论域为:
e/Kp/Ki={-3,-2,-1,0,1,2,3}
ec/Kd={-0.9,-0.6,-0.3,0,0.3,0.6,0.9}
为简化分析,本文使用各论域的绝对值进行分析,因此上述论域范围变为:
E、Kp、Ki论域为{0,1,2,3}
EC、Kd论域为{0,0.3,0.6,0.9}
本文中对于上述离散论域采用四种不同的模糊语言值进行描述,分别表示为{Z、S、M、B},模糊语言值子集元素对应为{零、小、中、大}。
其次根据各论域范围为各模糊语言值选择隶属函数,本文讨论中各模糊子集的隶属度函数均采用三角形函数,采用三角形法的各模糊子集隶属度函数如图4、图5.其中图4包含了输入、输出变量、E/Kp/Ki语言变量的隶属度函数,图5包含了输入、输出变量EC/Kd语言变量的隶属度函数。
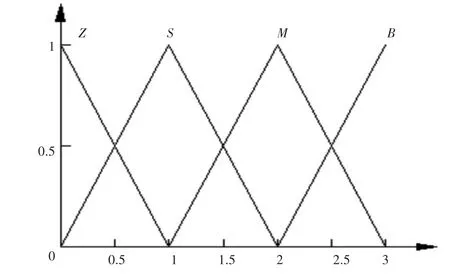
图4 E/Kp/Ki隶属度函数

图5 EC/Kd隶属度函数
控制规则是模糊控制器的核心,一般用条件If,结果Then语句来表示。根据要求本文为该悬架控制系统设计模糊控制规则(共16条),其中8条如下:
①if E=B且EC=B then Kp=M,Ki=Z,Kd=S
②if E=B且EC=M then Kp=B,Ki=Z,Kd=S
③if E=B且EC=S then Kp=B,Ki=Z,Kd=Z
④if E=M且EC=B then Kp=S,Ki=S,Kd=S
⑤if E=M且EC=M then Kp=M,Ki=S,Kd=S
⑥if E=M且EC=S then Kp=M,Ki=Z,Kd=Z
⑦if E=S且EC=B then Kp=B,Ki=M,Kd=M
⑧if E=S且EC=M then Kp=B,Ki=B,Kd=B
....
把16条控制规则列成模糊控制规则见表1.

表1 模糊控制规则表
表1中的每一条模糊控制规则if E and EC Then Kp、if E and EC Then Ki、if E and EC Then Kd均包含有一个三元模糊关系,式中关于Kp的模糊关系Rpi见式(5)。

同理可求得关于Kp、Kd的总模糊关系见Ri、Rd式(7)

那么针对控制器的任一采样时刻,根据模糊推理合成规则,结合式(4)中提出的关于液压悬架电液控制系统中PID控制三个参数计算的总模糊关系见式(8):

合成运算后Kp、Ki、Kd模糊子集均有(4×4)16个子集合,应用最大隶属度法对各模糊子集进行判决后得到采样时刻最终的控制量Kp、Ki、Kd的模糊查询表,然后乘以量化因子把此增量加入到前一时刻的控制环节中,编写程序实现计算机处理。
4 基于MATLAB/Simulink的铁水车悬架电液比例系统模糊PID控制系统仿真
4.1 建立仿真模型
在MATLAB/Simulink仿真软件中,结合上面所建立的悬架电液比例控制系统的模型传递函数,分别进行经典PID控制与模糊PID控制仿真分析,图6为经典PID控制的电液比例控制系统的仿真模型,图7为模糊PID控制的电液比例控制系统的仿真模型,图8为图7中的子系统。

图6 经典PID控制仿真系统模型图

图7 模糊PID控制仿真系统模型图

图8 模糊PID控制仿真系统的子系统模型图
4.2 仿真结果和分析
为了验证铁水车液压悬架电液比例控制系统采用模糊PID控制具有的良好性能,对系统模型进行不同输入下的输出相应仿真,分别得到的仿真结果为图9、图10.

图9 经典PID控制系统阶跃响应曲线

图10 模糊PID控制系统阶跃响应曲线
(1)单位阶跃信号下的仿真
当系统模型在单位阶跃信号输入下,可以看出经典PID控制与模糊PID控制的仿真曲线图9和图10,从上图可以看出经典PID控制的情况下,系统的超调量接近32%,控制系统的调整时间为1.6 s;而模糊PID控制系统的超调量只有8%左右,控制系统的调整时间为0.8s,可以看出响应速度比经典PID快了很多,且没有静态误差,过渡平稳,没有振荡现象出现。因此可以得出,铁水车悬架电液比例控制系统采用模糊PID控制比经典PID控制的控制性能有明显改善,超调量小、稳定快、控制过程更加平稳。
(2)正弦信号下的仿真
为了更进一步检验模糊PID控制系统对铁水车悬架电液比例控制系统的控制响应的动态性能和稳定性能,在正弦信号输入下进行了仿真,得到的仿真结果分别为图11、图12.

图11 经典PID控制系统正弦响应曲线

图12 模糊PID控制系统正弦响应曲线
通过上图可以看出,经典PID控制的铁水车悬架电液比例控制系统有明显的滞后,而模糊PID控制能够很好地实现跟随输入,所以模糊PID控制在快速性、稳定性、精度上都明显优于经典PID控制。
5 结束语
本文以经典PID控制为基础通过引入模糊控制理论设计模糊PID控制器,参数可以通过自我调整实现系统对性能的要求,增加了系统的可靠性、稳定性。并通过模糊PID控制系统对铁水车悬架系统进行仿真分析,通过分析得出该系统具有自适应性的调整能力,采用模糊PID控制比经典PID控制的控制性能有明显改善,过程更加平稳,动态性能也得到明显改善。
[1]谢明,张吉胜.基于CODESYS的铁水车电气控制系统计[J].湖北工业大学学报,2012(04):160-164.
[2]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2014
[3]杨晶,同志学,王瑞鹏,等.液压机械手电液比例系统模糊PID控制研究[J].机械科学与技术,2013,32(6):180-185. [4]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):166-172.
[5]赵元金,李虹.基于模糊PID的电液位置伺服控制器设计研究[J].湖北工业大学学报,2008(11):20-26.
[6]孙忠潇.Simulink仿真及代码生成技术入门到精通[M].北京:北京航空航天大学出版社,2015.
[7]苏明,陈伦军,林浩.模糊PID控制及其MATLAB仿真[J].现在机械,2004(4):51-55.
[8]孙元华.基于MATLAB的电液比例模糊PID控制研究[J].电气自动化,2010,32(3):28-30.
Lad le Vehicle Suspension Electro-hydraulic Proportional System Fuzzy PID ControlResearch
XIEMing1,2,HE Li-le1,GENG Hui-liang2
(1.Xi’an University of Architecture and Technology,Xi’an Shaanxi710055,China;2.MCC Bao Steel Technology Services Co.,Ltd.,Shanghai 200941,China)
Electro-hydraulic proportional generally used to ladle vehicle suspension system and it must be controlled precision and smooth,classical PID control is simple,reliable and good robustness,but the load lead to control volatile,so the single data set couldn’tmake appropriate adjustments for the vehicle's actual condition,so the classical PID control performance is poor.The transfer function of control system is studied and the fuzzy control theory is introduced in this paper in order to improve this situation,fuzzy self-tuning PID controller has been designed by combine fuzzy control theory with classical PID control theory,online self-tuning has realized of PID control parameters.MATLAB/Simulink simulation results show that fuzzy PID control used in the electro-hydraulic proportional system has better dynamic performance.
ladle vehicle;electro-hydraulic proportional;fuzzy PID control
TH238
A
1672-545X(2017)04-0084-05
2017-01-18
谢明(1985-),男,湖南洞口人,工程硕士,研究方向:冶金特种工程机械开发。
