基于加速度传感器的室内消防员定位系统设计
2017-06-23沈佳辉
居 艳,骆 懿,沈佳辉
(杭州电子科技大学通信工程学院,浙江 杭州 310018)
基于加速度传感器的室内消防员定位系统设计
居 艳,骆 懿,沈佳辉
(杭州电子科技大学通信工程学院,浙江 杭州 310018)
采用MPU-9250九轴运动传感器、MSP430f5529微控制器和ZigBee技术,设计了基于惯性导航的室内消防员定位系统.根据采集到的三轴加速度和陀螺仪信息,通过步伐检测、方向判断及人员状态判定,实现了消防员的精确定位.将采集数据汇总到数据采集系统中,测试结果显示步数误差在3%以内,实现了对消防员的运动轨迹的粗略跟踪,具有一定的实际应用价值.
九轴运动传感器;微控制器;ZigBee;惯性导航
0 引 言
火灾现场危险性大,消防员的人身安全在救援过程中受到极大威胁,因此迫切需要一种定位系统对其行径路线进行实时定位和跟踪.目前常用的定位方式主要有全球定位系统[1](Global Positioning System, GPS)、基站定位[2](Location Based Service, LSB)、北斗定位等.在室外开阔环境下,这些定位方式的精度较高,但是,在室内或有遮蔽物的环境下,由于信号被大幅度削弱[3],不能进行有效定位.惯性定位是一种适用范围较广的独立定位方式[4],其原理是以牛顿力学为基础,通过惯性测量单元(Inertial measurement unit,IMU)测量运动的实时加速度与角速度,再经积分获得移动节点的位置[5-6]及运动信息.本文提出的惯性定位采用MPU-9250复合芯片[7](MCM),该芯片内部包括三轴加速度传感器、三轴陀螺仪传感器以及AK8963三轴磁力计传感器.将MPU-9250九轴运动传感器、MSP430f5529微控制器和ZigBee技术结合,设计并搭建了基于惯性定位方式[8-9]的消防员室内定位系统,并通过测量实验对定位系统进行了性能分析.
1 硬件系统设计
1.1 定位系统设计
消防员室内定位系统主要由两部分组成,其整体结构图如图1所示.第一部分为随身携带的消防员定位装置,由MPU-9250模块、MSP430f5529主控模块、ZigBee数据传输模块[10]组成.以上模块都是低功耗模块,在外接1 000 mAh移动电源的情况下,支持长时间的定位.第二部分为消防员监控中心,由ZigBee数据收集节点以及一台PC机构成.能够实时接收定位装置传输过来的数据包并对其进行数据解析,将被定位的消防员的位置状态实时显示在PC机上.第一部分与第二部分之间采用ZigBee无线网络连接,利用ZigBee无线传输模块传输中间数据,在空旷环境下传输距离最远可达400 m,有利于跟踪装置对消防员进行远距离的监控.

图1 消防员室内定位系统整体结构图
1.2 消防员运动模型
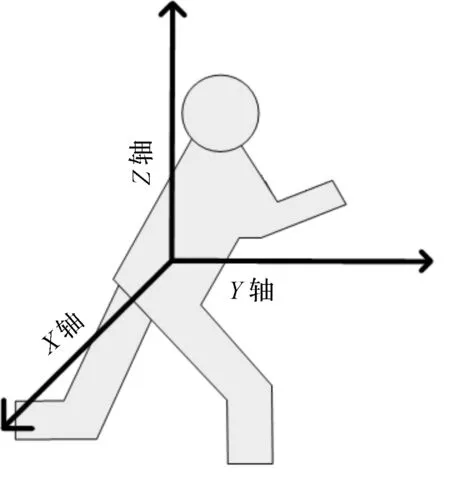
图2 消防员运动模型
消防员运动模型如图2所示.首先建立空间坐标系,假设消防员的前进方向为Y轴,与Y轴垂直的为X轴与Z轴,其中Z轴正方向为垂直向下.
消防员在行走时会产生3个方向上的分量加速度:前向分量(Y轴),侧向分量(X轴)以及垂直分量(Z轴).而MPU-9250九轴运动跟踪芯片中包含了三轴的加速度传感器,与消防员的3个运动方向相对应.消防员在行走时,垂直方向加速度会有周期性的变化,从抬脚至最高点再到落地是一个完整步伐,期间加速度经历逐渐变大至波峰再到波谷的变化过程.因此可以通过探测加速度的变化来监测消防员的行走步伐.
1.3 数据包传输
主控芯片MSP430f5529通过I2C语句读取MPU-9250中的温度寄存器、加速度寄存器和陀螺仪寄存器中的值,并将其存入数组中.后将存入数组的数据写入串口缓冲区,通过串口发送至ZigBee无线传输模块.数据包中传输的数据包括16位的温度、每个方向16位的加速度和陀螺仪的量化值,量化误差较小.
2 定位方法设计
2.1 步伐检测
当消防员处于行走状态时会产生3个方向的加速度值,行走中任何时刻手持定位装置,总会有至少一个方向轴具有相对较大的周期性加速度变化[11],因此进行峰值检测是至关重要的.步伐检测方法的主要流程图如图3所示,首先进行三轴峰值检测,选择出波动最大的轴默认为垂直运动的轴,然后进行局部最大值寻找.为去除行走及跑步之外的情况下产生迅速或缓慢的振动干扰(滤除不必要的高频噪声),选取一个预定阈值.通过与阈值的比较来判断是正常行走还是静止状态下产生的细微抖动,如果大于设定阈值则每检测到一个波峰,步数值便加1.

图3 步伐检测流程图
2.2 方向判断
为实现精确定位,除进行步伐检测外还需要实时获取消防员的方向信息.本系统中通过Z轴陀螺仪的数据变化来判断其是处于顺时针旋转状态还是逆时针旋转状态.具体流程如图4所示,首先初始化方向角,对采集到的陀螺仪数据进行分析以此来判断旋转方向.为了去除正常细微抖动导致产生错误判断的情况,需连续进行多次采样进行旋转特征的判断,最后对数据进行处理将其转换成旋转角度.
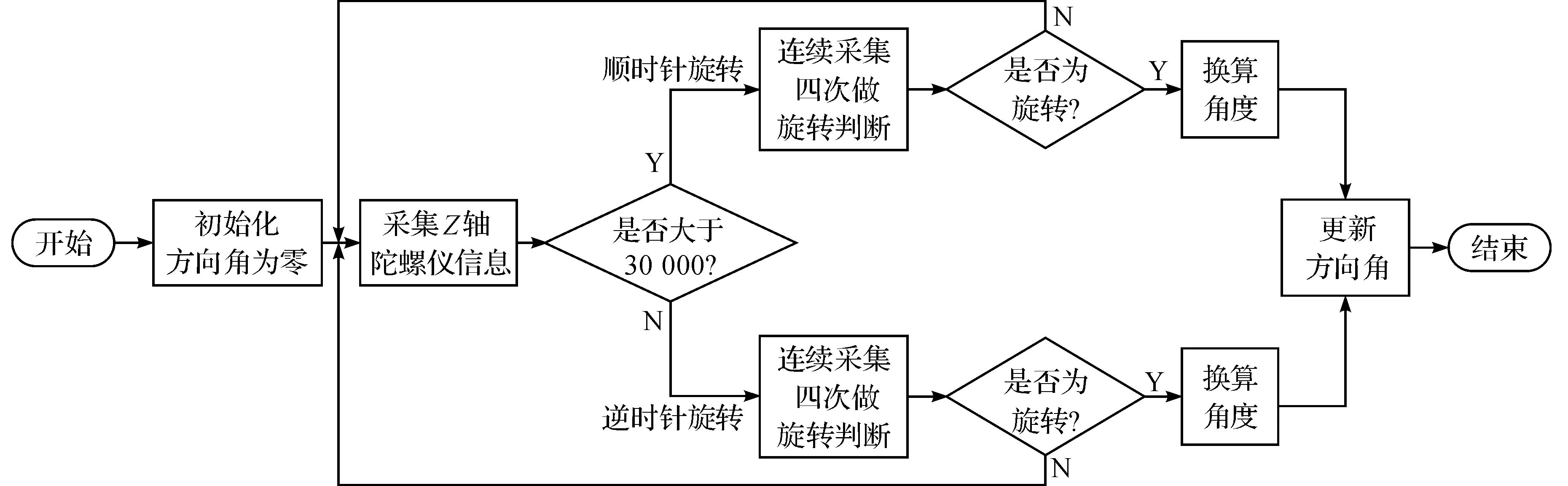
图4 方向判断流程图
根据MPU-9250芯片手册可得:当FS_SEL=0时,陀螺仪的灵敏度为131 LSB/((°)/s).若收到的实时陀螺仪数据设为x,4次采集的数据分别为x1,x2,x3和x4,求得当前方向角:
(1)
其中,ω为当前方向角,Δt为采样时间间隔,每次的累计旋转角度对圆周取余后便为当前角度值.
2.3 运动状态判断
本系统不仅可对消防员进行定位,还可以根据三轴加速度的信息来对消防员所处运动状态进行实时判断,具体方法流程如图5所示.首先获取Y轴数据,根据Y轴加速度判断消防员此时处于卧倒状态还是直立状态.若处于直立状态,根据Z轴加速度大小来区分其处于正常行走状态还是处于奔跑状态;若处于卧倒状态下,通过对Z轴的波动情况多次采样来判断消防员是卧倒匍匐还是受伤晕倒,若受伤晕倒,则需要对其立即实施营救.

图5 所处行动状态判断流程图
3 软件平台搭建
图6 监控界面布局
PC端监控平台采用LabVIEW软件编写,程序为框图形式.整个监控界面的布局如图6所示,其功能主要包括:串口配置以及数据收发(左上)、加速度信息显示(右上)、陀螺仪信息显示(右下)和定位轨迹图(左下).
采集三轴的加速度数据如图7所示,静止状态下X轴与Y轴几乎为0,Z轴为一个重力加速,设置灵敏度参数AFS_SEL=0时,最大量程为4个重力加速度即4g,每16 384单位为1g,因此Z轴的量化数据在16 384附近波动.在正常行走状态和跑步状态下三轴加速度都有规律波动,其中Z轴波动最明显,并且在跑步状态下波动更为剧烈.
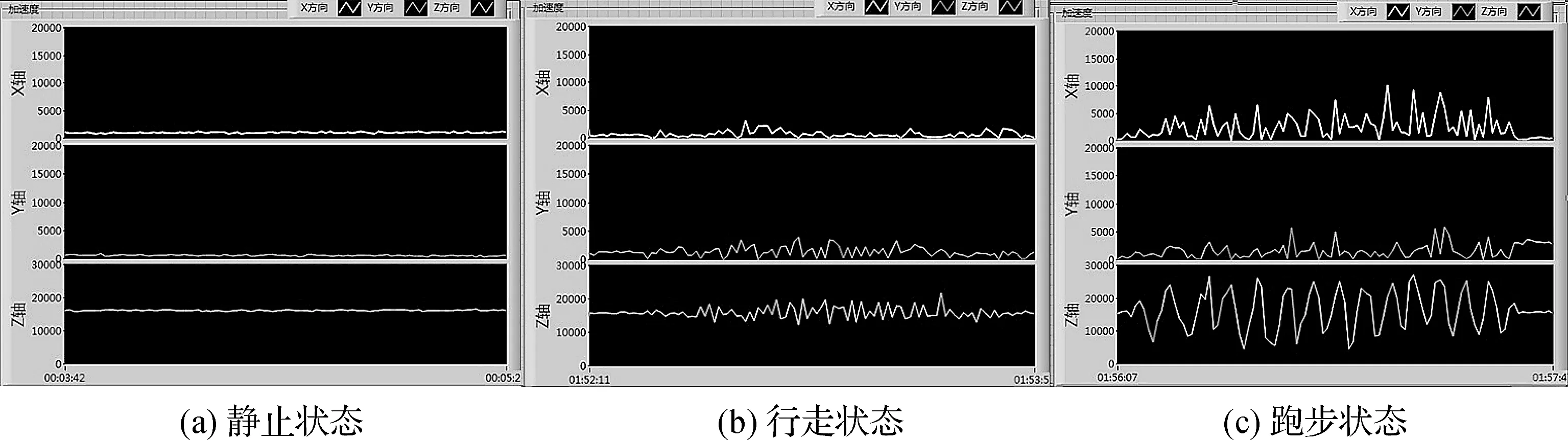
图7 加速度数据显示
图8为消防员所处监测状态说明,从左至右分别包括了4种状态,根据当前加速度信息并结合2.3中的状态归类方法可推算出当前的状态信息,在相应的状态下指示灯会开启.
图8 消防员所处状态显示
采用步伐检测方法对加速度数据进行处理,多次实验后的计步结果与前进距离的数据汇总如表1所示,每次实验步数为100步.

表1 计步结果及步长测量结果
表1中可以看出,测量装置的计步误差都在3%以内.
为将前进步数转换为消防员的前进距离,需对消防员步伐长度进行预校准,因此实验中需记录每次实验的前进步数,并根据以下公式进行换算:
S=s×n
(2)
其中,S为前进距离,s为平均步长,需根据佩戴者校准,n为步伐数.
根据实验总结,本测量装置中s取值为67.0 cm.
为测试状态显示的准确性,模拟消防员的4种运动状态进行实验,每种运动状态测试20次,得出的精度如表2所示.

表2 状态测试结果
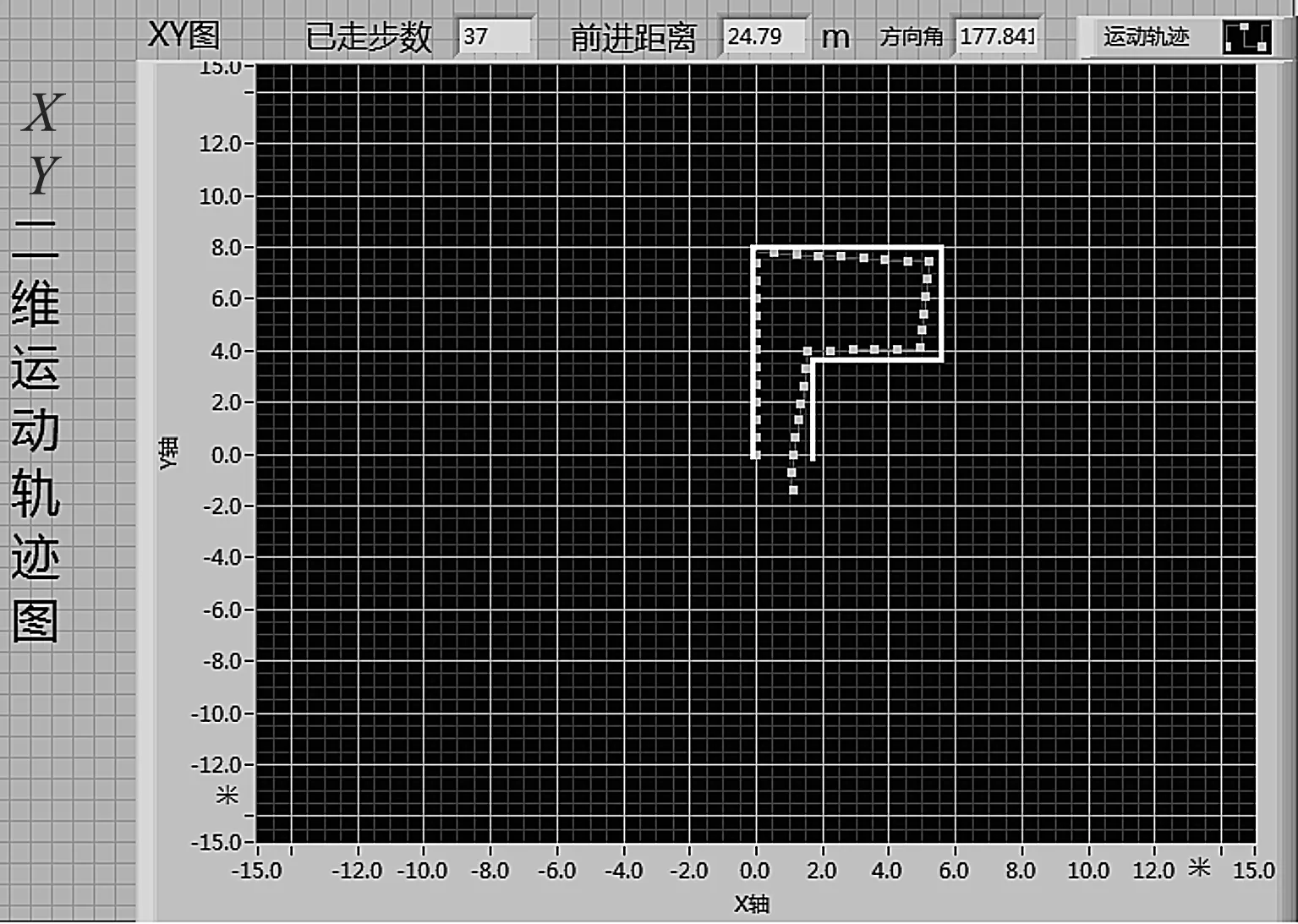
图9 实际定位效果
实验结果表明,除偶尔会出现正常行走和奔跑之间的判断失误,其他情况下基本能够准确判断出测试者所处运动状态.
图9为定位测试实际效果,图9中,实线为测试者实际运动轨迹,虚点线为定位轨迹,其中点为落脚点.从测试结果可知,在运动中由于步伐长度的估计误差以及角度的累计误差会导致定位偏移,但是总体能够粗略判断出测试者的位置信息.
4 结束语
本文研究并实现了消防员室内定位系统,对消防员定位信息数据进行采集、传输和处理,利用3种状态判断方法对消防员的位置、方向和运动状态进行判断,将消防员的状态信息实时传输到监控系统.本文仅在理论上证明了本装置可行性,但在消防员救灾过程中各种具体场景中的实际应用仍需进一步的探讨和实践.后期需对装置的硬件方面进行优化,以增强装置的耐用性和便携性,从而更好地适应消防救灾场景.
[1]ELLIOTT D K. GPS原理与应用[M].寇艳红,译.北京:电子工业出版社,2007:347-348.
[2]HUANG L H, SHR K T, LIN M H, et al. A Noise-Robust Convex-Optimized Positioning System Based on Code-Aided RSS Estimation and Virtual Base Station Transform[J]. Journal of Signal Processing Systems, 2016,84(3):309-323.
[3]BERBAKOV L, PAVKOVIC B, VRANE S. Smart Indoor Positioning System for Situation Awareness in Emergency Situations[C]//26th International Workshop on Database and Expert Systems Applications (DEXA). IEEE, 2015:139-143.
[4]YANG F, LU J L, THEOLEYRE F, et al. Dynamic active area clustering with inertial information for fingerprinting based indoor localization systems[C]//IFIP Networking Conference (IFIP Networking), 2015. IEEE, 2015:1-9.
[5]HARLE R. A survey of indoor inertial positioning systems for pedestrians[J]. IEEE Communications Surveys & Tutorials, 2013,15(3):1281-1293.
[6]GOYAL P, RIBEIRO V J, SARAN H, et al. Strap-down Pedestrian Dead-Reckoning system[C]//International Conference on Indoor Positioning and Indoor Navigation. 2011:1-7.
[7]刘春阳,徐军领,程洪涛,等.MPU9250传感器的姿态检测与数据融合[J].河南科技大学学报(自然科学版),2015,36(4):14-17.
[8]王巍.惯性技术研究现状及发展趋势[J].自动化学报,2013,39(6):723-729.
[9]张金亮,秦永元,梅春波.基于MEMS惯性技术的鞋式个人导航系统[J].中国惯性技术学报,2011,19(3):253-256.
[10]贾朱红,张晓冬.基于I2C总线的单主多从单片机之间的通信[J].微计算机信息,2009,25(3):101-102.
[11]周红进,许江宁,覃方君.一种新的基于加速度计的无陀螺捷联惯性导航系统设计与实现[J].仪器仪表学报,2008,29(7):1499-1502.
The Firefighter Indoor Positioning System Research Based on Accelerometer Sensor
JU Yan, LUO Yi, SHEN Jiahui
(SchoolofCommunicationEngineering,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
A firefighter indoor positioning system based on inertial navigation was put forward in this paper, in which the technologies of MPU-9250 nine axis motion sensor, MSP430f5529 microcontroller and ZigBee were used. Then, three algorithms including step detection, direction determination and firefighter’s state determination combine with the three-axis accelerometer and gyroscope information collected by software,achieve the precise positioning of firefighters. Finally, the data will be aggregated to the data acquisition system. The experiment results show that the error of step number is less than 3%, and it can recognize the current status of firemen accurately. So it has practical value to a certain extent.
nine axis motion sensor; microcontroller; ZigBee; inertial navigation
10.13954/j.cnki.hdu.2017.03.008
2016-09-14
居艳(1991-),女,山东潍坊人,硕士研究生,嵌入式系统设计.通信作者:骆懿副教授,E-mail:luoyi@hdu.edu.cn.
TP212.9
A
1001-9146(2017)03-0035-05
