面向电网巡检的多旋翼无人机航测系统关键技术研究及应用
2017-06-19宫煦利
汤 坚,杨 骥,宫煦利
(1. 中国能源建设集团广东省电力设计研究院有限公司,广东 广州 510663; 2. 广州地理研究所,广东 广州 510070)
面向电网巡检的多旋翼无人机航测系统关键技术研究及应用
汤 坚1,杨 骥2,宫煦利1
(1. 中国能源建设集团广东省电力设计研究院有限公司,广东 广州 510663; 2. 广州地理研究所,广东 广州 510070)
针对无人机电力巡检所面临的定位精度低、近距离巡检操控难度大、自动化程度低、人为操控事故风险高等问题,本文提出了利用多旋翼无人机RTK差分定位技术、复杂塔型飞行规则机器学习算法等无人机航测系统技术,研发面向电网巡检的无人机智能操作系统及控制终端,提升电网线路日常管理和应急指挥的规范性、便利性和经济性,为电网管理部门提供一种低成本、易操作、高效率、机动灵活的新型巡检模式。
电网巡检;RTK差分定位;机器学习算法;无人机智能操作系统
传统的电网巡检劳动强度大、条件艰苦,因此,电网管理部门急需一种成本低、自动化程度高、机动灵活的新型巡检方式。无人机系统具有机动、快速、经济等优势,现已逐步从研究开发发展到实际应用阶段。本文研究可实现高效电网巡检,快速发现输电线路运维过程中的缺陷和隐患,增强电网稳定性;同时,可作为电网应急联动系统的重要组成部分,为应急抢险提供及时的辅助决策,有效保障电网安全生产。
1 研究现状
无人机电力巡检在近年来得到快速发展,但依然面临以下主要问题:
(1) 定位精度低,在巡检过程中难免会受到树木、建筑物等障碍物的影响,以及导线产生的电磁干扰。
(2) 传统电力巡检对于杆塔本体的巡视,为了获取清晰的图像,对销钉级缺陷进行判别,近距离巡检操控难度极大。
(3) 自动化程度低,电力巡检人员通常采用人工操控无人机进行巡检,人为操作事故的风险高。
因此,本文对多旋翼无人机RTK差分定位技术、复杂塔型飞行规则机器学习算法,以及无人机智能操作系统等航测系统关键技术进行研究,将大幅提升电网无人机巡检的工作效率,降低风险,同时提高电网巡检管理水平,实现电网巡检管理的数字化与规范化。
2 多旋翼无人机航测系统关键技术研究
2.1 多旋翼无人机RTK差分定位技术研究
传统的多旋翼无人机采用卫星导航系统定位,当对输电线路进行近距离巡视时,易受电磁干扰而产生碰撞事故,给无人机电网巡视作业带来了安全隐患。多旋翼无人机RTK(realtime kinematic)载波相位差分技术,是实时处理基站和机载接收机载波相位观测量的差分方法,它将基站采集的载波相位发送给机载接收机,进行求差解算坐标,实时获取厘米级定位精度的结果(如图1所示)。

图1 多旋翼无人机RTK差分定位原理
多旋翼无人机结合RTK差分定位技术、长焦高分辨率可见光相机和红外相机,实现强电磁干扰情况下的电力巡视高精度定位和高清图像获取。通过无人机智能操控终端,自动化完成杆塔本体精细化巡视和通道巡视(如图2所示),从而实现无人机电网巡视的智能化作业,有效提升电网巡检效率,减少人为操作事故,增强电网稳定性。

图2 杆塔本体精细化巡视与通道巡视方法
2.2 多旋翼无人机复杂塔型飞行规则机器学习算法
目前,110 kV以上电压等级的输电线路已存在上百种不同的塔型,线路走廊通道的地理环境差异也比较大。因此,利用无人机进行电网巡视时,需要根据架空线路的不同工况和塔型的差异,采用不同的巡视规则和作业方法。为了保证巡视作业能够适应和兼容这些差异,本文针对典型塔型和地理环境研究无人机电网巡视理论模型与巡视策略,提出了多旋翼无人机复杂塔型飞行规则机器学习算法,确保了无人机自动化巡视作业的安全和效率。复杂塔型飞行规则的机器学习和断点续飞算法主要涉及自动分类和回归技术研究。
2.2.1 机器学习自动分类算法
机器学习分类算法,是根据样本的特征或属性,将其划分到已有的类别中,即根据其他属性的值或数据中潜在联系的模式(相关性、趋势、聚类和异常),预测特定属性的值,从而进行分类。常用的分类算法有逻辑回归、支持向量机、随机森林、朴素贝叶斯(NLP中常用)、深度神经网络(视频、图片、语音等多媒体数据中使用)等。
在当前业界的机器学习方法中,逻辑回归算法是最为常用的,它用于估算某种事物的可能性。假设样本是{x,y},x是m维样本特征向量,y是0或1,表示是否属于某塔型,那么这个样本塔x属于某塔型(即y=1)的概率可以通过下面的逻辑函数来表示
(1)
式中,x为包含塔的高度、尺寸等属性的特征向量;θ为对应x的模型参数(回归系数);σ是sigmoid函数。
利用无人机进行电网巡视时,首先创建模型,包括特征选择(塔型属性)、数据类型、属性类型与属性转换(样本属性分析),然后选择分类算法进行精确预测,从而完成塔型分类。
2.2.2 断点续飞回归算法
断点续飞回归算法是利用数据统计学原理,对大量统计数据进行数学处理,确定因变量与某些自变量的相关关系,建立一个相关性较好的回归方程(函数表达式),并加以外推,用于预测今后因变量变化的分析方法。回归技术通常用于预测分析,时间序列模型及发现变量之间的因果关系,主要算法有线性回归、普通最小二乘回归(ordinary least squares regression)、逐步回归(stepwise regression)、多元自适应回归样条(multivariate adaptive regression splines)等。
无人机在执行电网巡视航飞任务时,若因突发状况而导致航飞中断,可采用回归算法,从无人机的航飞位置变量推算出返航位置并继续执行航飞任务。以线性回归算法为例,根据无人机的航飞轨迹、中断位置等自变量x和返航位置因变量Y的相关关系,建立如下式x与Y的线性回归方程式,从而实现无人机的断点续飞功能,有效提升电网巡视的效率。
(2)
式中,Xt为无人机航飞位置的t类自变量;Yt为无人机返航位置的因变量;a、b1、b2、…、bn为线性回归方程式的参数。
2.3 无人机智能操作系统及控制终端研制
无人机智能操作系统是基于大疆SDK,针对电力巡检作业特点深度定制的无人机操作系统。为了能够大范围地查看电网周围环境,智能操作系统可以自动规划航线,全自动地完成输变电线路的精细化巡视和通道巡视作业,获取走廊通道范围内的正射影像、空中360°全景和倾斜摄影三维建模影像数据(如图3所示)。通过对无人机的智能操控,可以清楚、准确地发现杆塔本体和通道环境的缺陷和隐患,使无人机电网巡检作业更加安全可靠。

图3 无人机智能操作系统功能
杆塔精细化巡检模块分为学习模式和巡检模式。学习模式可以按照不同塔型记录和存储无人机的飞行轨迹和拍摄位置。所记录的飞行信息将作为飞行依据在自动化巡检模式中使用,实现无人机的自动精细化巡检,极大地降低了对巡视作业人员的无人机操控素质的要求,提升了杆塔巡检的效率,保证了电网巡视作业的安全(如图4所示)。

图4 精细化巡检主界面
在通道巡检模块中,无人机智能操作系统可以自动控制无人机快速获取施工黑点、滑坡、山火及树障等影像数据。无人机可以沿着通道进行视频拍摄和定时拍照(如图5所示),清晰地记录输电线路走廊通道范围内的环境情况,为巡视人员进行通道隐患排查提供数据支撑。

图5 通道巡检主界面
控制终端基于Android系统进行定制开发,32GB以上存储,6.8寸以上屏幕,高清分辨率,4G模式双卡双待,满足IP67以上的防护等级要求,能够通过内置嵌入的智能操作系统控制无人机实现自动化电力巡视。
3 试验介绍
3.1 试验区域
2017年1月,笔者所在单位采用多旋翼无人机对广东电网某供电局所管辖的110kV某线路#1—#35进行精细化巡视,该线路90%以上杆塔处于山地或高山峻岭区域,全长约7.8km,精细化巡视作业难度大。
3.2 试验设备
本试验采用大疆Matrice600Pro多旋翼无人机搭载ZenmuseX5S云台相机,执行精细化巡视作业。该无人机最大的特点是搭载了大疆A3Pro飞控系统,配备3套IMU和GNSS模块,提升了无人机巡视时的定位控制精度,保障了稳定飞行。
3.3 成果分析
本次多旋翼无人机自动精细化巡视试验发现杆塔本体重大缺陷34处(如图6所示)。相比传统的人工巡检方式,无人机巡检具有表1所示的特征。实践表明,结合RTK差分定位技术和复杂塔型飞行规则机器学习算法,多旋翼无人机巡检可以实现电力巡视高精度定位和高分辨率影像获取。通过自主研制的无人机智能控制终端自动化完成精细化巡视作业,快捷、安全、高效,从而实现电网精细化运维的规范化。

图6 精细化巡视试验结果
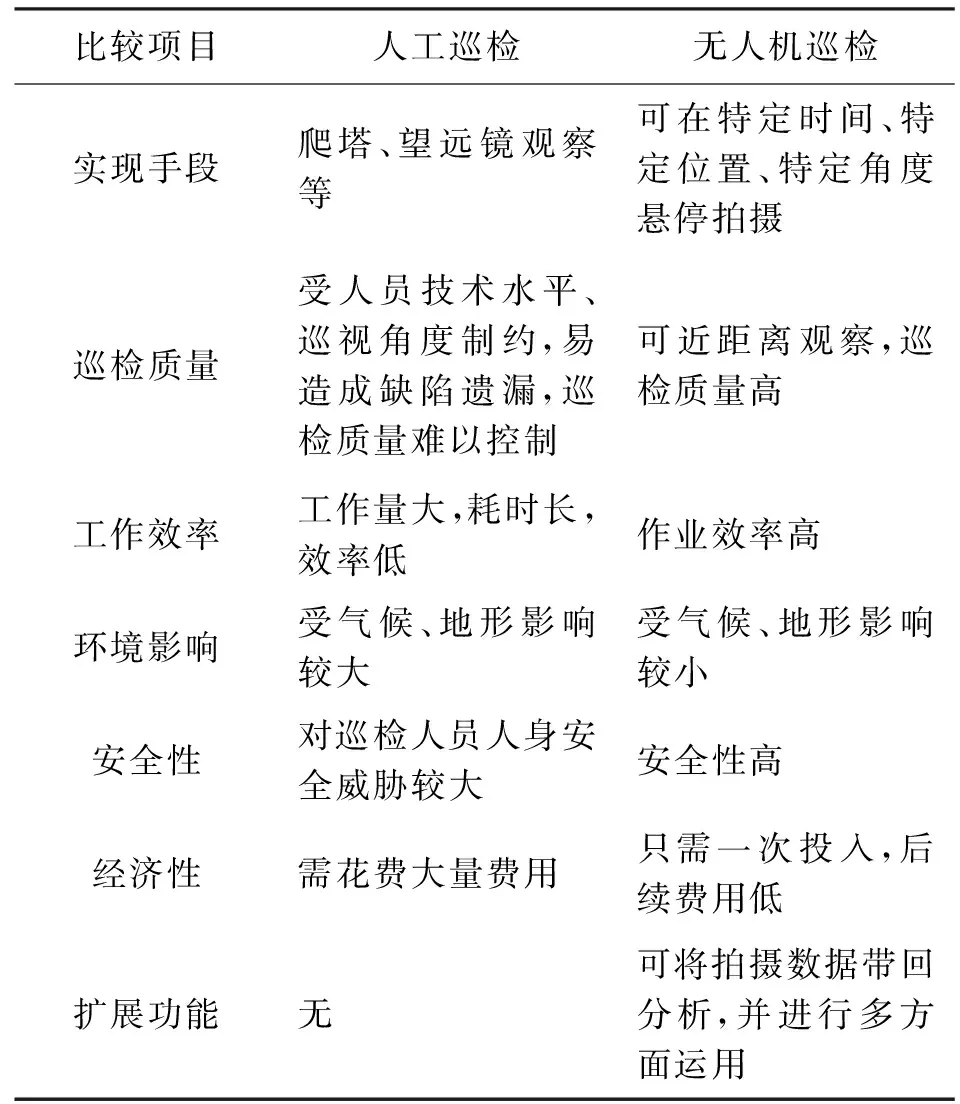
比较项目人工巡检无人机巡检实现手段爬塔、望远镜观察等可在特定时间、特定位置、特定角度悬停拍摄巡检质量受人员技术水平、巡视角度制约,易造成缺陷遗漏,巡检质量难以控制可近距离观察,巡检质量高工作效率工作量大,耗时长,效率低作业效率高环境影响受气候、地形影响较大受气候、地形影响较小安全性对巡检人员人身安全威胁较大安全性高经济性需花费大量费用只需一次投入,后续费用低扩展功能无可将拍摄数据带回分析,并进行多方面运用
4 结 语
本文突破了多旋翼无人机RTK差分定位技术、复杂塔型飞行规则机器学习算法等无人机航测系统关键技术, 研发了面向电网巡检的无人机智能操作
系统和控制终端,实现了输电线路杆塔本体和走廊通道的自动化巡视,为电网管理部门提供一种低成本、易操作、高效率、机动灵活的新型巡检方式。试验表明,本文研究成果可指导电网企业进行合理的设施巡检维护,降低电网故障停电损失,提升电网供电可靠性,为日常安全供电、企业生产和人民生活提供重要安全保障。
[1] 付昱玮,李字明,姜洪.无人机巡线的发展和应用研究[J].黑龙江科技信息,2014(3):25-27.
[2] 郑武略,张富春,焦炯,等.多旋翼无人机在输电线路巡检中的应用[J].中国电业(技术版),2016(4):70-73.
[3] 谢建春,孙丙玉,李文清,等.一种低空无人机航摄系统关键技术的试验研究[J].测绘通报,2015(10):85-87,125.
[4] 毕凯,李英成,丁晓波,等.轻小型无人机航摄技术现状及发展趋势[J].测绘通报,2015(3):27-31,48.
[5] 李力,徐勋建,李波,等.架空线路无人机巡线技术探讨[J].湖南电力,2012,32(1):44-47.
[6] 买小争,杨波,冯晓敏. 无人机航摄像控点布设方法探讨[J]. 测绘通报,2012(S1):268-271.
[7] 汤明文,戴礼豪,林朝辉,等.无人机在电力线路巡视中的应用[J].中国电力,2013,46(3):35-38.
[8] 尹杰,杨魁. 基于无人机低空遥感系统的快速处理技术研究[J]. 测绘通报,2011(12):15-17.
[9] 彭向阳, 刘正军, 麦晓明,等.无人机电力线路安全巡检系统及关键技术[J].遥感信息, 2015(1):51-57.
[10] 廖永生,陈文森. 无人机低空数字摄影测量参数计算和路线设计系统[J]. 测绘通报,2011(9):38-41.
[11] 谭雪敏,吴远峰,袁正午,等.拉格朗日多项式逻辑回归分类算法并行计算优化[J].遥感信息,2016(1):96-101.
[12] 毛林,陆全华,程涛.基于高维数据的集成逻辑回归分类算法的研究与应用[J].科技通报,2013(12):64-66.
[13] 孙德山,赵君,高釆葵,等.基于一类分类的线性规划支持向量回归算法[J].计算机科学,2014,41(4):230-232,243.
[14] 曹凤海,宋占武,李燕,等.无人机航摄拍照瞬间精确空间位置的确定[J].测绘通报,2016(6):144-145.
[15] 崔红霞,林宗坚,孙杰. 无人机遥感监测系统研究[J]. 测绘通报,2005(5):11-14.
Multi-rotor UAV Aerial Survey Technology for Power Grid Inspection:Research and Application
TANG Jian1,YANG Ji2,GONG Xuli1
(1. China Energy Engineering Group Guangdong Electric Power Design Institute Co. Ltd., Guangzhou 510663, China;2. Guangzhou Institute of Geography, Guangzhou 510070, China)
To solve the problems of low positioning precision, difficult control in close inspection, low automation, high risk of man-made control of UAVs power inspection, this paper proposed a multi-rotor UAV RTK differential positioning technology, and machine learning algorithm of UAV Aerial Survey flight rules planning in complex electric tower inspection. Based on this research, it developed a UAV intelligent operating system and control terminals which greatly improved the quality of the normative daily management and emergency command of power network with high convenience and efficiency. The system could provide the low costs, easy operation, high efficiency and mobility new power inspection mode for the power grid management department.
power grid inspection; RTK differential positioning; machine learning algorithm; UAV intelligent operation system
汤坚,杨骥,宫煦利.面向电网巡检的多旋翼无人机航测系统关键技术研究及应用[J].测绘通报,2017(5):67-70.
10.13474/j.cnki.11-2246.2017.0156.
2017-03-28
2017年广州市产学研协同创新重大专项;2015年广东省水利科技创新项目
汤 坚(1981—),男,高级工程师,主要从事无人机电网巡检服务工作。E-mail: fishman1831@126.com
P208
A
0494-0911(2017)05-0067-04