Lipschitz非线性系统观测器设计方法
2016-11-22马晴孙伟贾雪松
◎马晴 孙伟 贾雪松
Lipschitz非线性系统观测器设计方法
◎马晴 孙伟 贾雪松
针对一类满足Lipschitz条件的非线性系统,研究了输出对状态为非线性时的情况下,Luenberger型观测器的设计问题,给出了判断观测器稳定的充分条件,并利用LMI技术选取观测器的增益矩阵,最后,利用Simulink对该情况下的系统及其观测器进行仿真,实现状态的准确观测。
目前,线性系统的观测器设计问题已经较为完善,而非线性系统观测器的设计还没有一个通用方法,通常是针对不同情形采用不同方法。
许多实际的非线性系统都是全部或局部满足Lipschitz条件,它们作为一类特殊的非线性系统,其状态观测器设计是由Thau首次提出,并给出了观测器的具体形式和渐进稳定的充分条件。
本文在文献中利用LMI技术选取反馈增益矩阵的方法的基础上,研究一类具有普遍形式的输出相对状态为非线性的Lipschitz非线性系统,并通过Simulink仿真实现该系统的状态观测。
一类Lipschitz非线性系统及其状态观测器
对某Lipschitz非线性系统,描述如下:


其中γ为相应的Lipschitz常数。
对该系统设计Lue nberger型观测器如下:

由中的定理可知,式(2-3)给出的观测器就可保证动态误差是渐进稳定的。
输出相对状态为非线性的Lipschitz非线性系统及其观测器
将输出相对状态为线性时的方法推广到输出相对于状态为非线性时的情形,并对原系统和观测器进行仿真,实现准确状态观测。
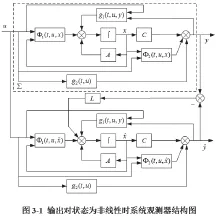
系统与状态观测器的描述。针对输出相对于状态为非线性时的Lipschitz非线性系统,设计Luenberger型观测器如下,结构如图3-1所示:

观测器的动态误差为:

该观测器的设计实质就是选择合理的增益矩阵使动态误差(3-2)渐进稳定。
由文献中定理可知,式(3-1)给出的观测器可确保动态误差(3-2)是渐进稳定的。

在总结文献[4]中将代数Riccati方程的正定解问题转化为一组线性矩阵不等式的可行性问题的方法基础上,利用Matlab中LMI工具箱的feasp函数,获得增益矩阵L。
仿真。考虑一输出相对状态为非线性的Lipschitz非线性系统,各参数取值如下:
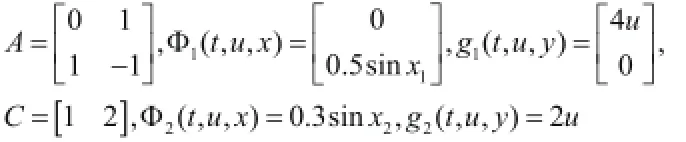
显然γ1=0.5,γ2=0.3。利用LMI求解,可得:L=[1.4180.386]T。
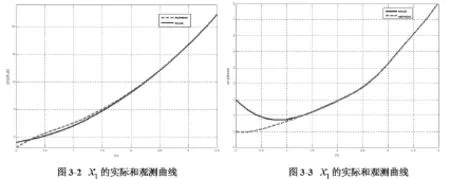
将所得增益矩阵L 带入到观测器(3-1)中,给定输入是振幅为1的sine wave,图3-2是状态 x1在初始值时的实际和估计曲线,图3-3是状态x2在初始值时的实际和估计曲线。横坐标为时间,纵坐标为振幅,实线是真实值曲线,虚线是观测值曲线。
由上图可见,开始几秒内,观测器的状态不与原系统状态完全一致,但能很快跟踪原系统,达到状态误差逐渐趋于零,成功利用LMI技术对输出对状态为非线性的Lipschitz系统设计了一个能够快速跟踪原系统Luenberger型状态观测器。
本文根据系统输出与状态的关系,研究了一类Lipschitz非线性系统在输出对状态为非线性时,系统的一般形式及其Luenberger型观测器的设计,并利用LMI技术,较好的解决了此类系统的观测器增益矩阵L的选取问题,最后通过仿真,实现了对系统的准确观测。
(作者单位:沈阳城市建设学院)