机载北斗/GPS/SINS组合导航系统软硬件设计
2016-11-17连强强
王 锦,刘 鹏,尹 川,连强强
(中国飞行试验研究院,西安 710089)
机载北斗/GPS/SINS组合导航系统软硬件设计
王 锦,刘 鹏,尹 川,连强强
(中国飞行试验研究院,西安 710089)
针对单一导航导航系统在导航精度、稳定性、设备成本以及导航信息完备性等方面的局限性,设计了卫星导航/惯性导航组合导航系统;针对GPS导航系统受制于人及北斗导航系统发展尚不完善的特点,提出了基于北斗/GPS/SINS的军用机载组合导航系统软硬件设计;搭建了北斗/GPS/SINS组合导航系统硬件平台,采用基于不确定度的加权平均数据融合算法提高组合导航系统的导航可靠性和准确性;仿真结果表明,该组合导航系统稳定性好,可靠性高,定位准确。
卫星导航;惯性导航;组合导航;不确定度;加权平均
0 引言
时间与空间是物理世界的基本属性,因而对时间和空间关系的测量,就在现实世界中扮演着基础而且关键的作用。机载导航定位技术就是获取飞机的空间信息,安全且低成本的引导飞机,准确的沿着选定的路线,准时到达目的地的一种手段。
目前,机载导航系统主要采用GPS卫星导航。GPS导航定位精度高、观测时间短、提供三维坐标、可测速、操作简便并可提供全天候的导航信息。但是也存在卫星信号容易受到遮挡物的干扰,GPS卫星受制于美国政府并由此而带来的在特殊时期导航系统不可靠性,卫星导航系统自身由于客观条件而带来的导航误差等问题。
捷联惯性导航(SINS)不依赖于任何外部信息,也不向外部辐射能量,不受外界电磁干扰的影响,能提供位置、速度、航向和姿态角数据,数据更新率高,在军事方面广泛应用。但是惯性器件具有固定的漂移率,长期单独使用误差不断增大,惯性导航解算时需要初始坐标并且初始对准时间较长。
从已有的研究来看,单个导航系统的发展已不能满足国防科技、社会生产及人们的日常生活对导航系统的精度及稳定性要求,组合导航已成为导航系统的发展趋势[1-2]。本文利用GPS导航、SINS导航和我国自主研发的北斗导航系统设计了机载北斗/GPS/SINS组合导航系统,主要搭建了硬件平台,设计了可靠的数据融合算法,提高了导航系统数据的可靠性与稳定性。
1 硬件设计
在硬件设计方面,本系统采用ATmega128单片机作为核心处理器件[3],整体结构包括电源、IMU(惯性测量单元)数据采集单元、BD2/GPS双系统数据采集单元、通信接口单元、运算处理单元及显示单元等。硬件设计框图如图1所示。
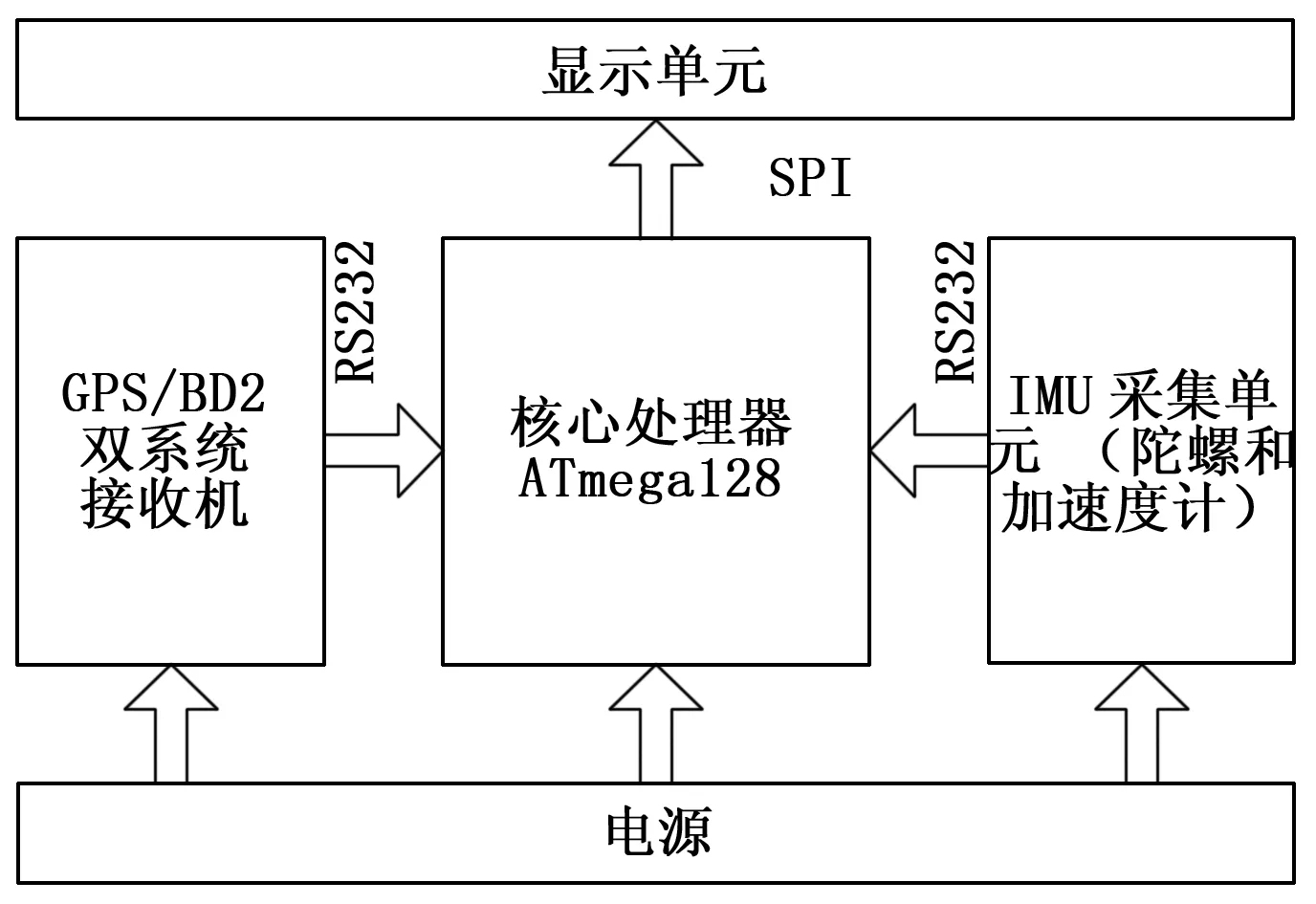
图1 组合导航系统硬件设计框图
2 软件设计
2.1 总体设计
在软件设计方面,本系统采用基于不确定度的加权数据融合算法对单一导航系统信息进行融合,以提高组合导航系统的精度和稳定性。首先,为了得到更为平滑稳定的加速度和陀螺仪数据,IMU模块的数据经过卡尔曼滤波之后送入到主控芯片ATmega128,之后进行SINS导航解算,得到SINS单一导航系统信息。然后,对北斗导航信息、GPS导航信息和SINS导航信息进行不确定度计算,根据组合不确定度最小原则求得单一导航信息相应的权值。最后,根据单一导航系统信息权值及导航结果,计算出组合导航系统的导航结果。
2.2 组合导航系统加权平均数据融合算法
组合导航系统的核心是数据融合算法,引入不确定度理论的加权融合算法可以在一定程度上提高组合导航系统的精度及稳定性[4]。
本系统采用北斗/GPS/SINS松耦合导航方式,其单个导航系统的数据测量和输出为动态过程,可采取“滑动窗”的方法进行AR模型建模,不断更新序列组数据,将旧数据移除,新数据加入。本文将导航系统的数据输出序列采用AR(3)模型建模:
(1)

对于(1)式,问题为已知当前及历史数据,求取未知参数a1、a2、a3及εt的估计值。下面,用基于遗忘因子的递推最小二乘法对其进行估计,递推公式如下:
(2)


(3)
其中:Q(k)为:
(4)
根据不确定度理论,测量标准不确定度由标准差表示,即:

(5)
通过(3)到(5)可以计算出动态模型序列的不确定度。
本文中组合导航系统的输出值为北斗导航解算器输出数据、GPS导航解算器输出数据及SINS导航解算器输出数据的加权平均。假设权值分别为w1、w2、w3,则组合导航系统输出经纬度信息为:
(6)
且满足ω1+ω2+ω3=1。
对于组合导航系统,首先根据(5)式求取单个导航系统不确定度,再根据不确定度传播规律,求取数据融合后导航参数的不确定度为:
(7)
即:
(8)
其中,sα1、sα2、sα3为单个导航系统的经度不确定度,sβ1、sβ2、sβ3为单个导航系统的纬度不确定度,sα、sβ分别为组合导航系统的经度和纬度不确定度,s为组合导航系统的合成不确定度。
组合导航系统的关键问题是求取加权因子w,如(8)所示,如果已求得单个导航系统的经纬不确定度,在组合不确定度最小的原则下可以求得加权因子w,在此应用拉格朗日函数法进行求解,引入函数:
(9)
分别对w1、w2、w3求偏导,有:
(10)
同时又有w1+w2+w3=1,因此可以求得λ的值为:
(11)
则将(10)代入(11)式可以求得数据融合的权值为:
(12)
3 数据采集测试及仿真验证
3.1 BD2/GPS双系统模块数据采集测试
本次BD2/GPS双系统模块数据采集于过程为10分钟,利用上位机软件完成对采集数据的接收及保存并利用Matlab绘制运行轨迹,GPS/BD2经纬度及误差信息如图3~4所示。

图3 GPS/BD2导航系统经度及双系统定位误差
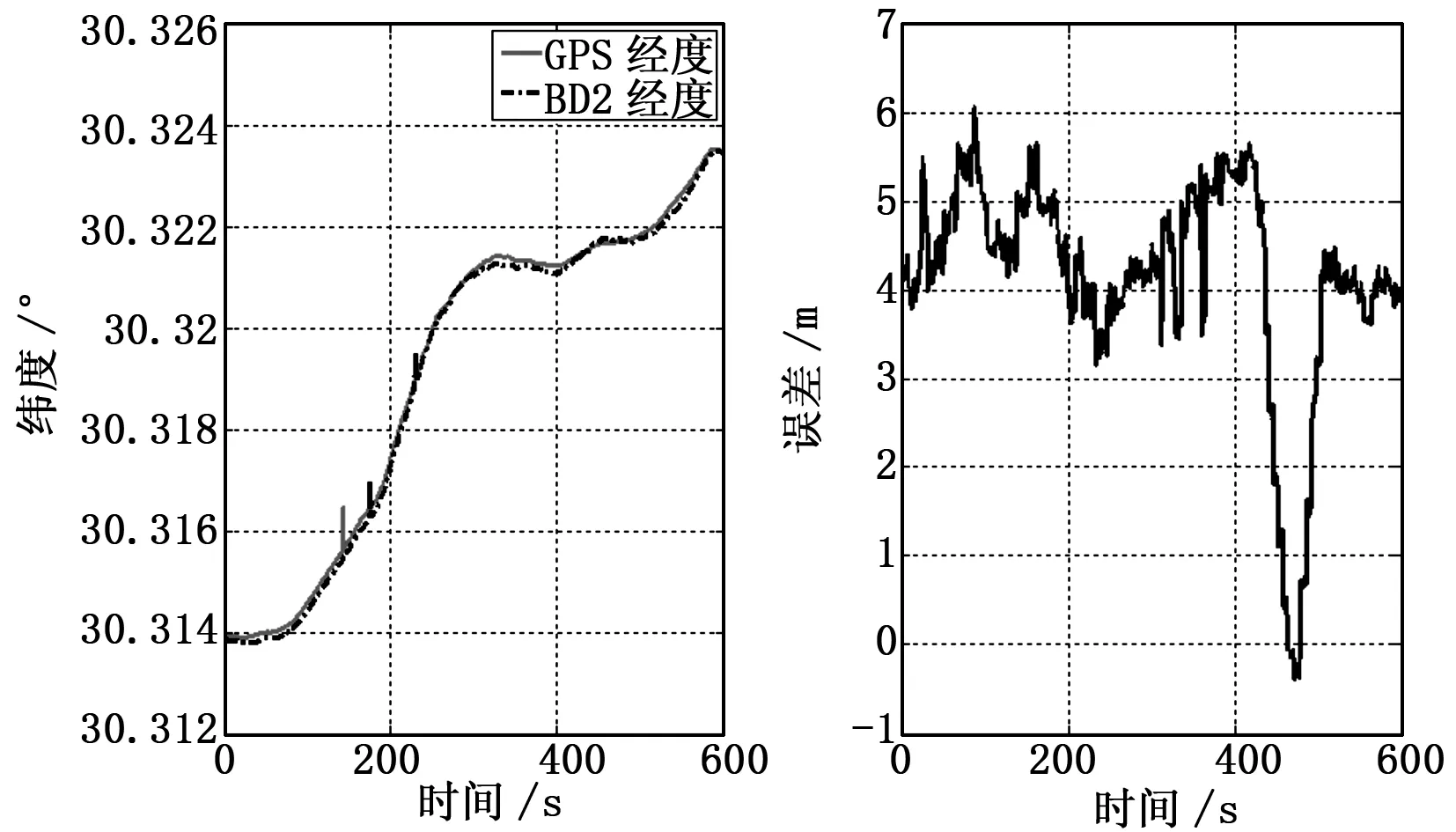
图4 GPS/BD2导航系统纬度及双系统定位误差
如图3~4所示,GPS模块和BD2模块都会在某个时间点出现短暂失星现象,导致定位输出不准确。由GPS系统和BD2系统的定位差曲线可以看出,单一导航系统之间的定位差也比较大。
3.2 IMU模块数据采集测试
STM8S003F3P6单片机对IMU模块的输出数据采集后,经串口传送至上位机,之后进行基于卡尔曼滤波的SINS导航解算[5],导航轨迹如图5所示。
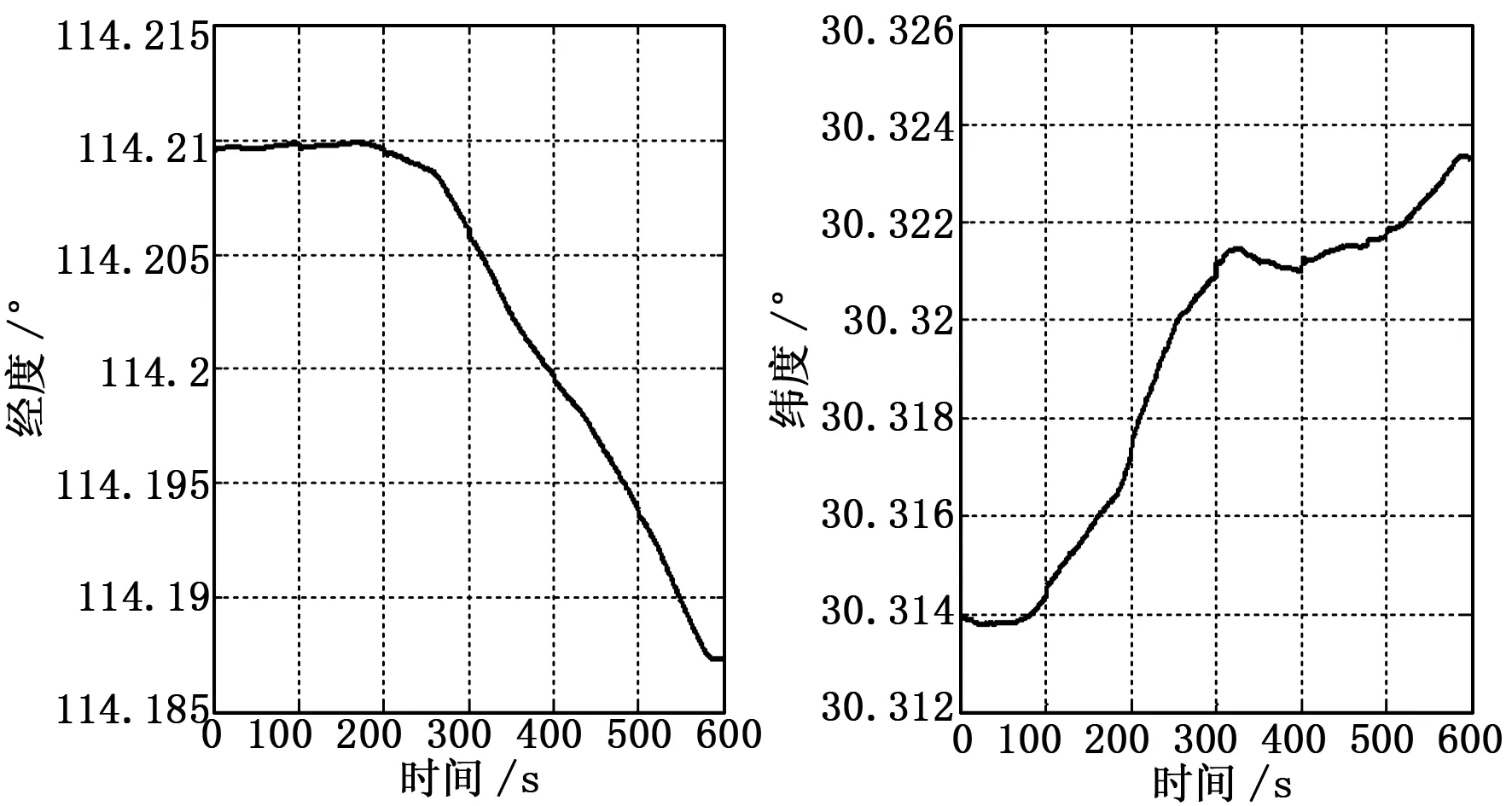
图5 卡尔曼滤波后SINS系统经纬度定位信息
如图5所示,由于SINS导航系统具有误差累积的特点,在进行SINS导航系统解算时每隔100 s利用GPS导航系统对其进行定时校准,因此在曲线上每隔100 s会有较为突兀的点。
3.3 导航系统不确定度仿真验证
导航系统动态输出信息的不确定度反映了导航系统输出信息的准确性,为了验证基于不确定度的组合导航系统加权平均算法的可行性,须对单一导航模块的输出经纬度信息及组合导航系统输出经纬度进行动态不确定度评定。单一导航系统经纬度的动态组合不确定度如图6所示。组合导航系统经纬度不确定度如图7所示。
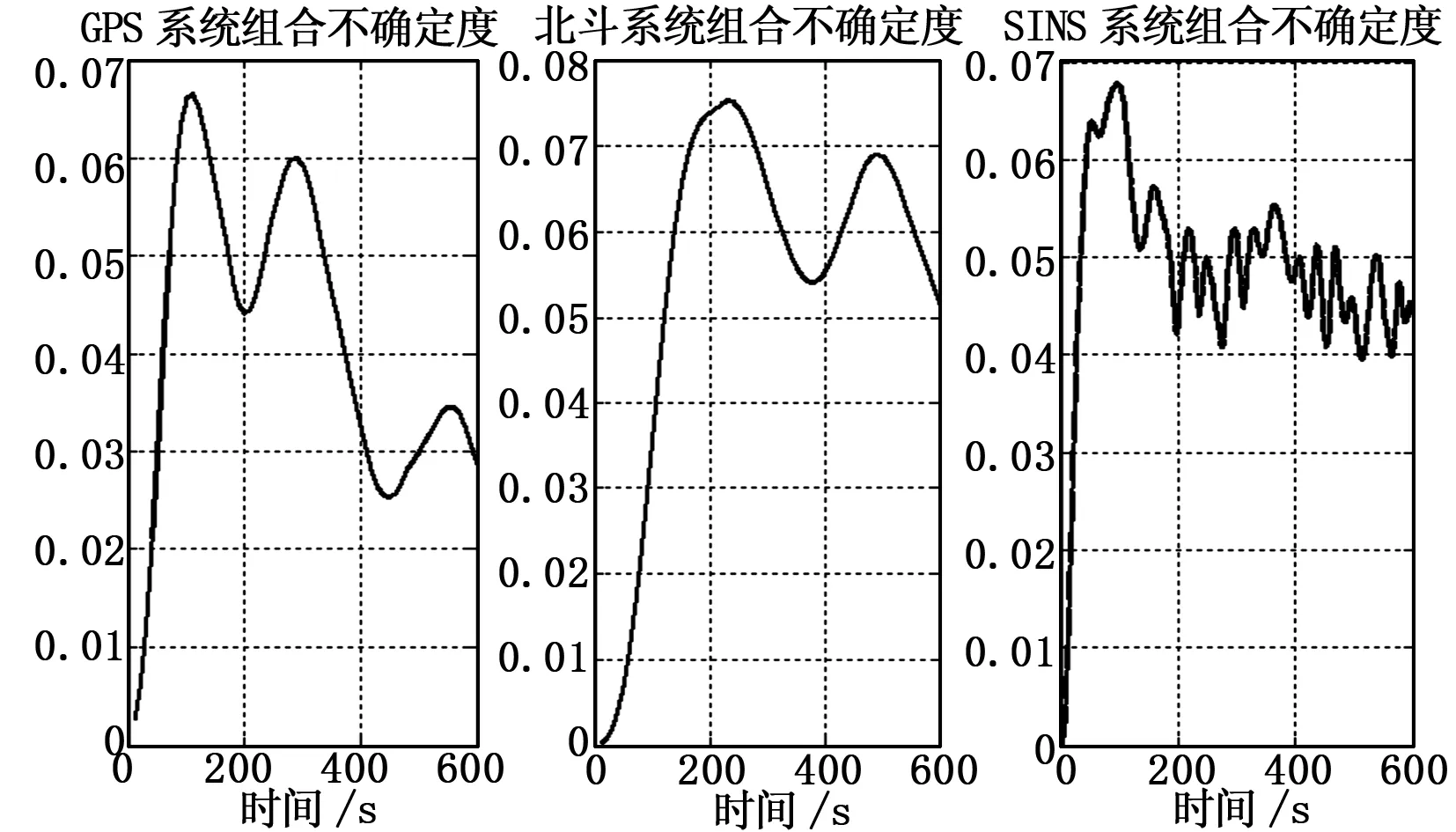
图6 单一导航系统经纬度动态组合不确定度
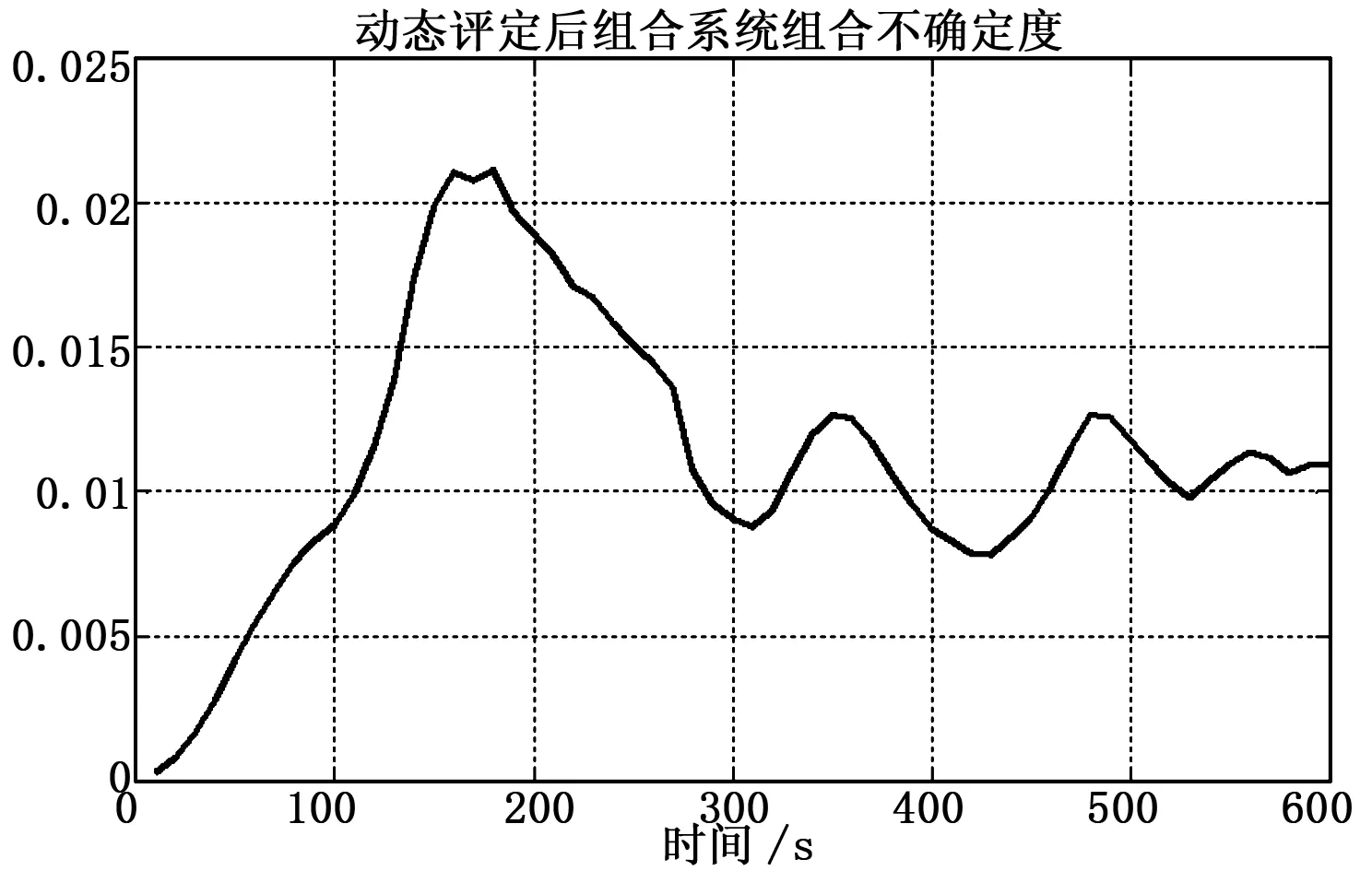
图7 组合导航系统经纬度组合不确定度
如图6~7所示,动态评定后的组合导航系统经纬度动态不确定度要比单一导航系统的经纬度动态不确定度小的多,说明了基于不确定度的加权数据融合算法提高了组合导航系统动态信息的准确性。
根据不确定度准则,由单一导航系统经纬度动态不确定度计算组合导航系统经纬度动态不确定度,根据组合不确定度最小原则,分别计算3个单一导航系统的动态输出数据的权值,得到的加权融合后组合导航系统经纬度信息如图8所示。
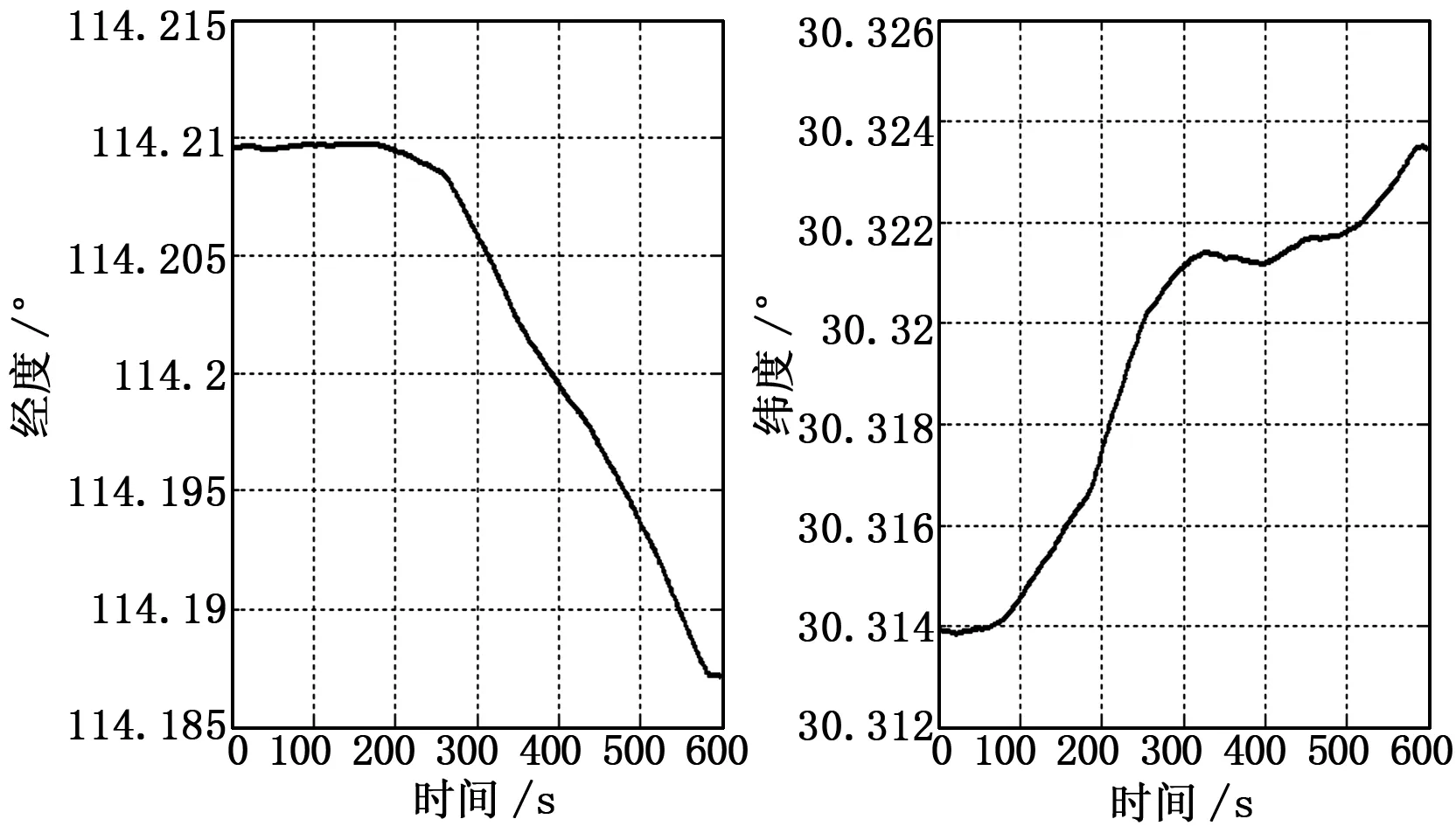
图8 加权平均后的组合导航系统经纬度
如图8所示,经组合导航数据动态融合后,系统定位结果比单个导航系统定位数据平滑了很多,尤其是当GPS或者BD2导航系统暂时失星(选取的卫星信号不是最佳卫星信号)时,也能输出稳定的导航信息,提高了组合导航系统数据的准确性,很好的验证了基于不确定度加权平均算法的可行性。
4 结束语
通过数据测试仿真对比可以看出,单一导航系统由于其本身固有的缺陷,存在着受制于人、导航数据输出不稳定、误差偏大、载体状态信息不完善等问题。设计的组合导航系统通过对单一导航系统输出信息进行不确定度评定,判断其可信度,可以在某个单一导航系统出故障时也可以输出准确可靠的导航信息。
[1] 张光理. 北斗/SINS组合导航系统研究[D]. 哈尔滨:哈尔滨工程大学,2012.
[2] 史 岩,朱 涛,傅 军.基于WPS/GPS/MIMU组合的无缝定位技术研究[J].计算机测量与控制,2014,22(10):3388-3391.
[3] 王少卿,霍迎辉. ATmega128在开发应用中应注意的问题[J]. 微型机与应用,2004(2):15-17.
[4] 朱培逸. 不确定信息的融合方法及其应用研究[D].无锡:江南大学,2013.
[5] Hu C W, Chen W, Chen Y Q, et al. Adaptive Kalman filtering for vehicle navigation[J]. Journal of Global Positioning Systems,2003,2(1),42-47.
Hardware and Software Design for Airborne BeiDou/GPS/SINS Integrated Navigation System
Wang Jin, Liu Peng, Yin Chuan, Lian Qiangqiang
(Chinese Flight Test Establishment, Xi’an 710089, China)
Designed of the satellite navigation / Inertial Navigation Integrated Navigation System, owing to the navigation accuracy, stability, equipment costs and completeness of the navigation information and other aspects of limitations for a single Navigation system. Because of the kinds of GPS navigation systems controlled by others and the development of Beidou navigation system is not perfect, so proposed hardware and software design for military airborne Beidou / GPS / SINS integrated navigation system. Built Beidou / GPS / SINS integrated navigation system hardware platform, based on the weighted average data fusion algorithm uncertainty improve the reliability and accuracy of navigation integrated navigation system. The simulation results show that the integrated navigation system stability, high reliability, accurate positioning.
satellite navigation; inertial navigation; integrated navigation; uncertainty; weighted average
2015-10-26;
2015-11-06。
王 锦(1979-),男,硕士,高级工程师,主要从事飞行试验、测试系统方向的研究。
1671-4598(2016)03-0267-03
10.16526/j.cnki.11-4762/tp.2016.03.073
TP3
A
