数字天顶仪中倾角仪参数的标定
2016-11-10刘先一周召发张志利刘殿剑朱文勇
刘先一,周召发,张志利,刘殿剑,朱文勇
(火箭军工程大学 兵器发射理论和技术国家重点学科实验室,陕西 西安 710025)
数字天顶仪中倾角仪参数的标定
刘先一,周召发*,张志利,刘殿剑,朱文勇
(火箭军工程大学 兵器发射理论和技术国家重点学科实验室,陕西 西安 710025)
针对运用数字天顶仪进行天文定位时旋转轴与垂直轴之间存在的轴系偏差, 提出了高精度天顶仪倾角补偿方法。从数字天顶仪倾角补偿原理出发,引入了倾角仪双轴尺度系数、双轴交角等参数对倾角仪的输出值进行修正,然后提出了一种双轴倾角仪参数的标定方法。分析了旋转角度对于参数标定的影响,运用实验数据对标定方法进行了论证。结果显示:旋转角度会直接影响CCD图像传感器安装角度的标定值。另外,倾角仪参数的引入提高了数字天顶仪的定位精度,当旋转角度的误差值在2°以内时,标定参数的误差对定位结果的影响非常小。
数字天顶仪;双轴倾角仪;轴系偏差;倾角补偿;旋转角度;参数标定
1 引 言
数字天顶仪是一种高精度的天文定位仪器,可用来测量测站点的天文坐标,在军事和大地天文测量中有较大应用。相较于国外,国内对于数字天顶仪的研究起步较晚[1-4]。在运用数字天顶仪进行天文定位的过程中由于旋转轴与垂直轴存在不一致性,所以需要对旋转轴进行倾角补偿[5]。曾志雄等人就天顶摄影仪的轴系误差对垂线偏差测量精度的影响及其修正方法进行了定性分析[6]。郭金运等人对数字天顶仪的垂线偏差和精度进行了定量分析[7],两者的结果基本一致,但是他们均缺乏对倾角仪的研究。在数字天顶仪中采用的是双轴倾角仪[8],对倾角仪输出数据的处理将直接影响到旋转轴与垂直方向间的倾角补偿,从而影响最终的定位精度。德国的Christian Hirt等人运用蒙特卡洛方法对双轴倾角仪问题进行了分析[9-10],但是却没有考虑双轴倾角仪双轴间的非正交及尺度系数等问题。
倾角仪的读数受零漂及温漂等影响[11-13],为了进行高精度的倾角补偿,本文从数字天顶仪倾角补偿原理出发,在考虑双轴倾角仪尺度系数和安装误差等参数的条件下对倾角值进行了修正,并提出了一种双轴倾角仪参数的标定方法,并分析了旋转角度对参数标定的影响,最后运用实验数据对标定方法进行了论证。
2 双轴倾角仪输出值的修正
双轴倾角仪能够对倾斜角进行高精度测量,从而实现旋转轴的补偿。如图1所示,A为CCD图像传感器安装位置与北向之间的夹角;β为双轴倾角仪与CCD图像传感器之间的安装夹角。
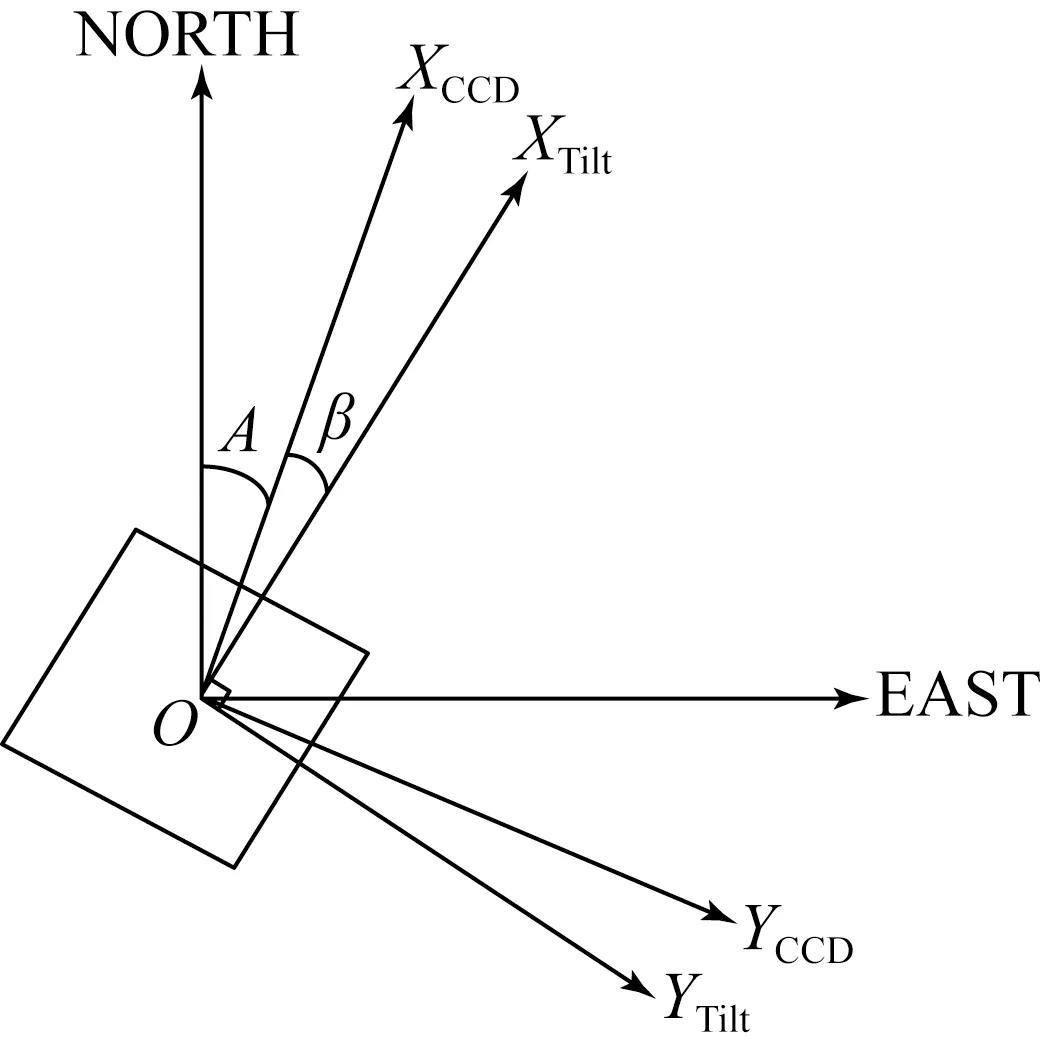
图1 倾角补偿原理图
由图1可得经纬度补偿值分别为:


(1)

然而安装在数字天顶仪上的双轴倾角仪两轴之间的夹角不可能完全正交,另外,由于变形等原因倾角仪的尺度系数也会发生变化。倾角仪的双轴用X轴与Y轴表示,在这里令双轴倾角仪双轴之间的夹角为ε,X与Y轴的尺度系数分别为m1与m2。由于倾角仪的读数存在零点偏差和漂移。其中漂移主要来自于温度的影响,但是在一定时间内温度漂移的数值几乎可以忽略。为了得到高精度的倾角仪数据,采取对称位置的数据读取方法。令X轴与Y轴置于初始位置时的读数分别为n1与n2,如图2所示。
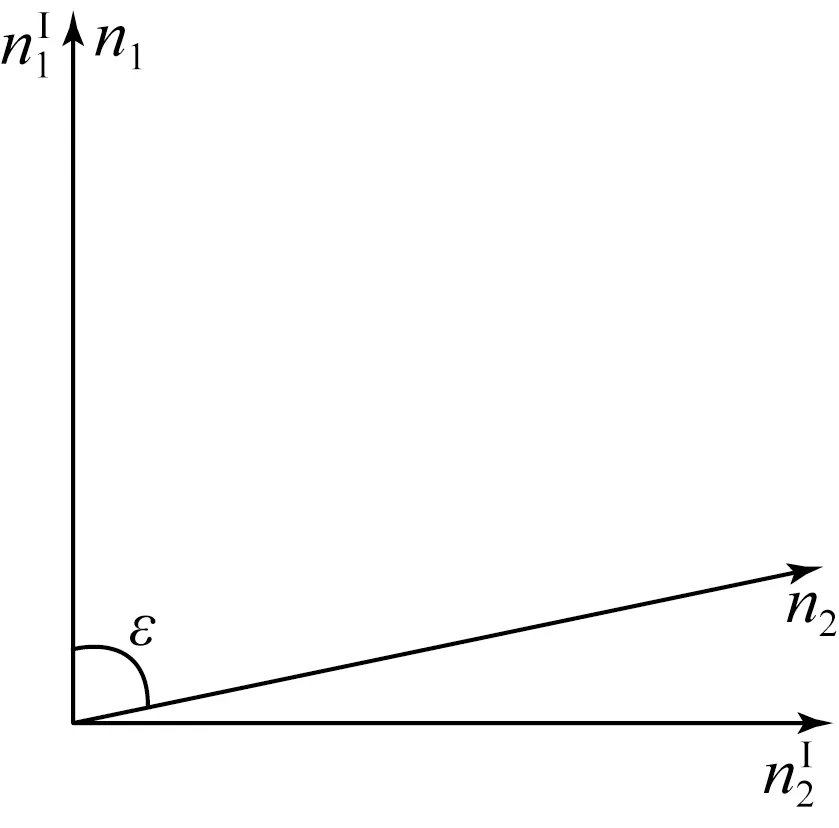
图2 双轴倾角仪两轴处于正交状态下的倾角示意图
Fig.2Schematic of tilt angle for inclinometer with two axis in orthogonal state
(2)


(3)
又因为:

(4)
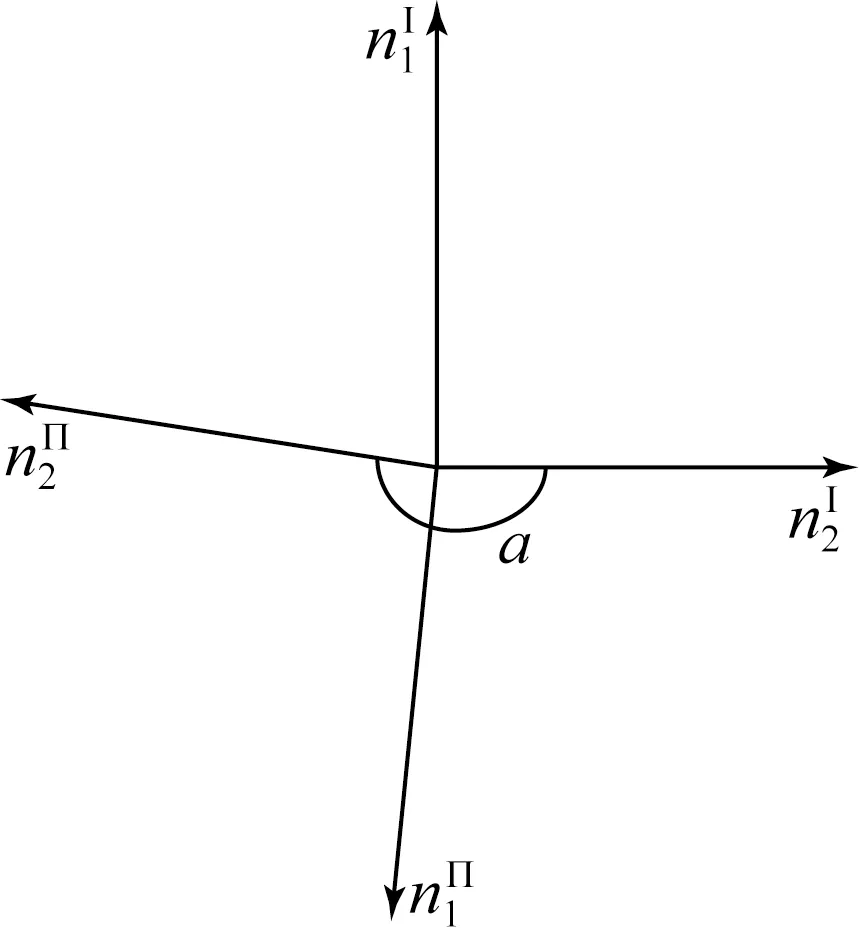
图3 旋转后的倾角仪状态



(5)

3 双轴倾角仪参数的标定
在对双轴倾角仪的输出数值进行修正的过程中引入了倾角仪尺度系数、双轴夹角。另外,双轴倾角仪与CCD图像传感器之间的安装角度也需要精确测定。这些参数的标定精度将直接影响到倾角的修正值,从而对测站点的定位结果造成影响,因此需要对这些参数进行高精度标定。
3.1参数标定的方法
在运用数字天顶仪定位时,通过对星图的解算得出数字天顶仪旋转轴的天文坐标,经过倾角补偿后求得测站点垂轴指向的天文坐标。依据倾角补偿值等于测站点真值与数字天顶仪旋转轴天文坐标之间的差值这一基本原理,对倾角仪参数进行标定。在参数标定的过程中测站点天文坐标的真实值是已知的,则有:

(6)
式中:(αR,δR)为旋转轴的天文坐标,(αT,δT)为测站点真实的天文坐标。
在运用数字天顶仪进行定位及利用倾角仪进行参数标定时采用处于对称位置的两幅恒星星图进行解算,一般认为旋转角度φ为已知量π,令:

(7)
(8)
首先对倾角仪安装角度和倾角仪参数分别赋初值β0、m10、m20、ε0、φ,能够得到倾角补偿值Δα0和Δδ0。令:
(9)
构建函数:
BΔx=b.
(10)
运用最小二乘算法可分别解算出Δβ,Δm1,Δm2,Δε。则倾角仪参数值变为:
β=β0+Δβ,
m1=m10+Δm1,
m2=m20+Δm2,
ε=ε0+Δε.
(11)
将新的参数值代入式(10)中重复进行计算,直到得到稳定的双轴倾角仪参数值为止。
3.2旋转角度对参数标定的影响
在对倾角仪进行参数标定的过程中,需要旋转拍摄星图,理想状态下旋转角度φ=π。在倾角仪参数标定时,往往直接将旋转角度取为π,但在实际的旋转过程中,并不能使旋转角度严格处于对称位置,而是存在旋转误差Δφ。经计算有:




(12)
对上式进行简化处理后有:

(13)
式(13)表明旋转角度φ的增量和安装角度β增量之间具有相关性,即旋转角度φ的设定值将会直接影响安装角度β的标定值。另外,旋转角度φ也会使式(7)中的矩阵B发生变化,从而会对倾角仪双轴尺度系数及双轴之间夹角的标定结果造成一定的影响。
从文献[14]可知,当倾角仪双轴尺度系数的标定误差的平方和小于10-6时,参数的标定误差对于定位结果的影响可以忽略不计。即:

(14)
也就是当存在旋转角度误差时,应保证标定结果满足式(14)。
4 实验数据的处理与分析
数字天顶仪中采用的双轴倾角仪为Nivel210,分辨率为0.2″。数字天顶仪的工作流程为先顺时针旋转拍摄8幅星图,然后再逆时针旋转拍摄8幅星图,也就是在一个定位循环中,数字天顶仪拍摄的星图总数为16幅。已知测站点真实的天文经度为108°55′17.78″,天文纬度为34°32′21.48″,在对倾角仪参数进行标定时,倾角仪读数如表1所示。
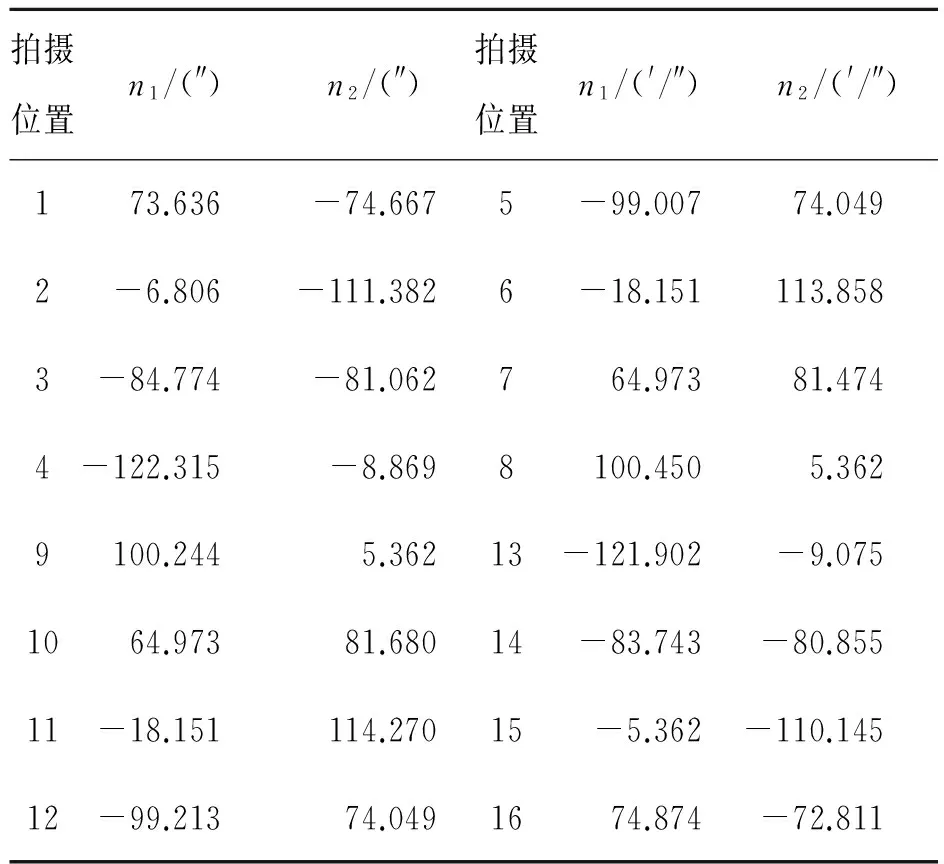
表1 倾角值
为了分析旋转角度对于倾角仪参数标定的影响,不断改变旋转角度φ,标定结果如图4所示。
通过图4可知,改变旋转角度φ时,标定的参数值也发生了变化,旋转角度将直接影响安装角度β的标定,旋转角度每改变1°,标定出来的安装角度β改变0.5°,两者之间的增量基本成线性相关,这与理论推导相一致;尺度系数在旋转角度为180°左右基本呈对称关系;而倾角仪双轴之间的夹角基本不受旋转角度变化的影响。结合式(14)分析可知,当旋转角度在2°以内时,倾角仪参数的变化对于定位结果的影响较小。
下面分别对引入倾角仪参数和未引入倾角仪参数两种情况下的定位精度进行比较,如图5所示。
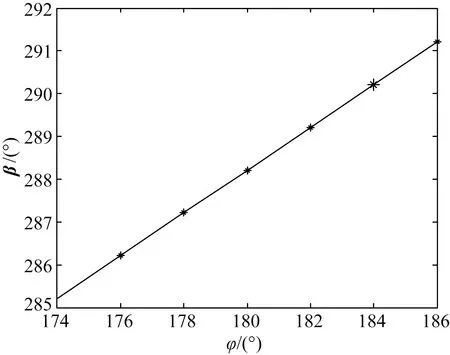
(a)安装角度β随旋转角度的变化(a)Installation angle β changes with rotation angle φ(b)尺度系数m1随旋转角度的变化(b)Scaling coefficient m1 changes with rotation angle φ
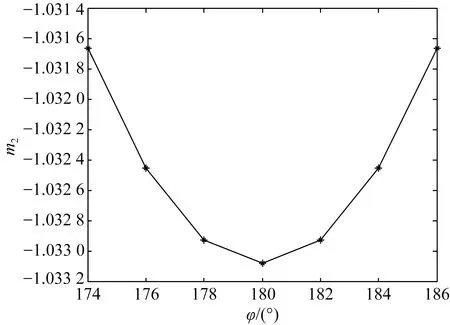
(c)尺度系数m2随旋转角度的变化(c)Scaling coefficient m2 changes with rotation angle φ(d)双轴夹角随旋转角度的变化(d)ε changes with rotation angle φ

(a)测站点经度(a)Station longtitude(b)测站点纬度(b)Station latitude
从图5可以看出,在引入倾角仪参数后,数字天顶仪的定位结果更加接近真实值,定位精度也有了显著提高。
5 结 论
倾角仪的读数直接影响了旋转轴与垂线之间的倾角补偿,为了对旋转轴进行高精度补偿,在考虑倾角仪的双轴尺度系数及双轴之间夹角等参数的条件下,对倾角值进行修正。倾角仪参数的引入提高了数字天顶仪的定位精度。在对参数进行标定时,旋转角度将直接影响CCD图像传感器安装角度的标定值。当旋转角度误差值在2°以内时,标定参数的误差值对于最终的定位结果影响较小。
[1]SCHOEBEL R, HEIN G, EISSFELLER B. Renaissance of astrogeodetic levelling using GPS/CCD zenith camera [C].ProceedingsoftheIAINWorldCongressinassociationwiththeU.S.IONAnnualMeeting,SanDiego,2000:26-28.
[2]田立丽,郭金运,韩延本,等.我国的数字化天顶望远镜样机[J].科学通报,2014,59(12):1094-1099.
TIAN L L, GUO J Y, HAN Y B,etal..Digital zenith telescope prototype of China [J].Chin.Sci.Bull, 2014,59(12):1094-1099. (in Chinese)
[3]KEREM H, RASIM D, HALUK O. Digital zenith camera system for Astro-Geodetic applications in Turkey [J].JournalofGeodesyandGeoinformation,2012, 1(2):115-120.
[4]HIRT C, SEEBER G. High-resolution local gravity field determination at the sub-millimeter level using a digital zenith camera [J].DynamicPlanet:IAGSymp, 2007,316-321.
[5]张志利,刘先一,周召发,等.转台误差对数字天顶仪轴系误差的影响[J].光学 精密工程,2015,23(11):3090-3096.
ZHANG ZH L, LIU X Y, ZHOU ZH F,etal.. Influence of turntable error on axis error in digital zenith camera [J].Opt.PrecisionEng., 2015,23(11):3090-3096. (in Chinese)
[6]曾志雄,胡晓东,高立民.天顶摄影仪轴系误差对垂线偏差测量精度的影响及其修正方法[J].光学 精密工程,2004,12(1):6-11.
ZENG ZH X, HU X D, GAO L M. Effect of digital zenith camera axis error on measurement precision of vertical deflection and its correction [J].Opt.PrecisionEng., 2004,12(1):6-11. (in Chinese)
[7]郭金运,宋来勇,常晓涛,等.数字天顶摄影仪确定垂线偏差及其精度分析[J].武汉大学学报信息科学版,2011,36(9):1085-1088.
GUO J Y, SONG L Y, CHANG X T,etal.. Vertical deflection measure with digital zenith camera and accuracy analysis [J].GeomaticsandInformationScienceofWuhanUniversity,2011,36(9):1085-1088. (in Chinese)
[8]HITR C, TIMO K. Hochprazise Negungsmessung mit dem elektronischen pendelneigungssensor HRTM [J].ZeitschriftfurVermessungswesen, 2004,129(4):266-276.
[9]HIRT C, GABOR P, ANDRA S,etal..Expected accuracy of tilt measurements on a novel hexapod-based digital zenith camera system:a Monte-Carlo simulation study [J].MeasurementScienceandTechnology, 2014,25(8):1-9.
[10]HIRT C,BURKI B,SOMIESKI A,etal.. Modern determination of vertical deflections using digital zenith camera [J].JournalofSurveyingEngineering.2010,136(1):1-12.
[11]文香稳,潘明华,朱国力.倾角仪特性研究及其测量误差补偿[J].传感器与微系统,2011,30(3):84-86.WEN X W, PAN M H, ZHU G L. Research on characteristic of the inclinnator and compensation for its measurement error [J].TransducerandMicrosystemTechnologies,2011,30(3):84-86. (in Chinese)
[12]于娜,刘志远,赵佳龙.倾角传感器的温度补偿研究[J].传感器与微系统,2014,33(10):14-16.
YU N, LIU ZH Y, ZHAO J L.Research of temperature compensation of inclination sensor [J].TransducerandMicrosystemTechnologies,2014,33(10):14-16. (in Chinese)
[13]樊锐,史磊.数字倾角仪的非线性补偿及抗干扰技术[J].仪表技术与传感器,2013(5):36-38.
FAN R,SHI L.Nonlinear error compensation and anti-jamming technique of digital clinometer [J].InstrumentTechniqueandSensor, 2013(5):36-38. (in Chinese)
[14]周召发,刘先一,张志利,等.基于数字天顶仪的双轴倾角仪研究[J].光子学报,2015,44(8): 21-26.
ZHOU ZH F,LIU X Y,ZHANG ZH L,etal.. Research on two-axis tilt sensor based on digital zenith camera [J].ActaPhotonicaSinica, 2015,44(8): 21-26. (in Chinese)

周召发(1973-),男,重庆忠县人,博士,副教授,1996年、2002年、2007年于第二炮兵工程学院分别获得学士、硕士、博士学位,主要从事定位定向与基准传递技术的研究。E-mail: 15594979259 @139.com
(版权所有未经许可不得转载)
Calibration of inclinometer parameters in digital zenith camera
LIU Xian-yi, ZHOU Zhao-fa*, ZHANG Zhi-li, LIU Dian-jian, ZHU Wen-yong
(StateKeyDisciplineLaboratoryofArmamentLaunchTheoryandTechnology,RocketUniversityofEngineering,Xi′an710025,China)*Correspondingauthor,E-mail:15594979259@139.com
To compensate the axis errors between rotation axis and vertical axis when a digital zenith camera was used in celestial positioning, a incline angle compensation method for the digital zenith camera was proposed. On the principle of incline angle compensation, the scale coefficients and the cross angle of two axes were taken into account to modify the inclinometer values. Then, a calibration method was proposed for the parameters of the two-axis inclinometer. The influence of rotation angle on calibration parameters was analyzed, and some experimental data were used to verify the calibration method. The result demonstrates that the rotation angle directly affects the calibration of CCD installation angle. Moreover, the introduction of inclinometer parameters improves the positioning accuracy. If the error of rotation angle is below 2°, the influence caused by inclinometer parameters can be ignored.
digital zenith camera; two-axis inclinometer; axis error; angle compensation; rotation angle; parameter calibration
2016-01-15;
2016-03-14.
国家自然科学基金资助项目(No.41174162)
1004-924X(2016)09-2325-07
TH752
A
10.3788/OPE.20162409.2325

刘先一(1991-),男,河南信阳人,博士研究生,2013年于第二炮兵工程大学获得学士学位,主要从事定位技术研究。E-mail: 1397559188@qq.com