双馈风力发电系统优化控制
2016-10-14刘海营
刘海营 管 萍
(北京信息科技大学自动化学院,北京 100192)
双馈风力发电系统优化控制
刘海营管萍
(北京信息科技大学自动化学院,北京100192)
本文双馈风力发电系统,提出了一种基于滑模理论的非线性控制方法,选择风力机转速和最优转速的差值为滑模面,设计滑模控制器。此外,采用定子磁链定向的矢量控制技术,实现有功功率、无功功率的解耦控制。最后,根据风力机最优功率运行曲线,对6kW的双馈风力发电系统进行最大风能追踪控制研究。仿真结果表明,在给定随机风速情况下,风力机能基本保持最佳叶尖速比和最大风能利用系数,最大限度的输出功率,实现最大风能追踪控制,减小机械载荷。
双馈风力发电系统;风力机;最大风能追踪;滑模控制
为了保证双馈风力发电机组输出功率最大,一般在额定风速以下,要求风力机保持最佳叶尖速比,才能获得最大的气动功率,风速变化、桨距角的调整和叶尖速比的变化都影响风力发电机组的输出功率[1-2]。本质上风电机组的控制目标就是通过一定的控制方法时风轮的转速跟随风速的变化,保持最佳叶尖速比,实现最大风能追踪的控制。由于风电机组本身具有多变量、惯性大、非线性等特点,传统的控制方法很难保证跟随风速的变化,而且风速快速变化的情况下,严格跟踪风速又会引起较大的机械振动,对机械部件造成损害。因此,针对双馈风电机组非线性和风速随机性等特点,应用非线性的控制方法实现风电机组的最大风能追踪和降低机械振动是整个风电系统控制研究的重点。
大多数风能转换系统采用的发电机类型主要有双馈感应发电机、自励式发电机、永磁同步发电机。本文采用双馈发电机,因为其具有如下优点:首先,能在较大的风速范围内正常运行;其次,能产生恒频的有功功率;最后,能实现有功功率、无功功率的解耦控制。
滑模控制的“滑动模态”可以进行设计且与对象参数及扰动无关,因此,滑模控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、实现简单等优点,确保状态轨迹在期望的滑模面附近运动。对双馈风力发电系统最大风能跟踪来讲,正是需要系统运行在最佳功率曲线上,因而滑模控制正好成为有效的工具。
本文通过转速控制方法优化风力发电系统输出最优转矩,最后以6kW双馈风力发电系统为研究对象,进行最大风能追踪的仿真研究。
1 双馈风电系统模型
双馈风力发电系统的结构图如图1所示。双馈电机的定子直接连接电网,转子通过三相励磁变换器进行交流励磁,从而使电磁功率通过定转子两个回路与电网进行交换。从整个系统来看,可以被分成两个相对独立的子系统,分别是空气动力学系统(包括风力机和齿轮箱)和电气子系统(双馈电机)。

图1 双馈风力发电系统结构图
2 发电机模型
对于双馈发电机,定、转子分别选取发电机与电动机惯例,在d、q两相同步速旋转坐标系下,电压和磁链方程分别为[3]

电磁转矩方程为

定子端有功功率、无功功率方程为

式中,s、r分别代表定、转子侧变量;d、q分别代表同步旋转坐标系的坐标轴;u、i、ψ分别代表电压、电流和磁链;R、L分别代表电阻和电感值;np代表极对数;P、Q代表有功功率和无功功率;ω0、ωs分别代表同步角速度和转差角速度。
为了简化后续控制器的设计,采用定子磁链定向的矢量控制方法,对有功功率、无功功率实现解耦控制。将定子磁链的矢量ψs定向在d轴上时,有

当电机稳定运行时,定子磁链保持恒定,忽略定子电阻sR,则有

式中,a=Rr,,c=Lmψs/Ls。
此时电磁转矩简化为

定子端有功功率、无功功率简化为

可见,Ps,Qs分别与转子电流的转矩分量 irq和励磁分量idr成线性关系,通过调节两个电流的分量就可以独立地调节有功功率、无功功率,进而实现解耦控制。
3 风力机模型
风力机是风力发电系统中能量转换的首要环节,能将截获的流动空气产生的动能转化为机械能,对整个风力发电系统的输出功率影响较大,直接影响整个风力发电机组的稳定运行、安全可靠性能等。
根据空气动力学的相关知识,可以推导出风力机捕获风能的功率为[4]

式中,ρ为空气密度;v为外界风速;Cp为风能利用系数;β为桨距角;λ为叶尖速比,叶尖速比为叶片尖端线速度与风速之比,且满足:

式中,ω为风力机叶轮角速度,R为风力机叶轮半径。
风能利用系数 Cp是表征风力机转换效率的重要参数,本身与风速和风力机设计的参数有关系,本文选用常用的风能利用系数经验式为[5]

风能转换系统的运动方程为[6]

式中,J和 B是整个发电机侧总的转动惯量和摩擦系数;Tmec是齿轮箱输出的机械转矩也即是发电机的输入转矩;Te是发电机的电磁转矩;ωr是发电机的机械角速度。
因为风力机和发电机是通过增速齿轮箱联系在一起的,如果忽略传动过程中的各种损耗,则风轮机角速度和发电机角速度,风力机吸收的机械转矩和发电机的输入转矩满足的关系式如下:

式中,G为增速齿轮箱的传动比,wT为风力机转化风能得到的机械转矩。
4 最大风能追踪原理
由式(10)可知,假定发电机转速保持恒定值不变,当外界风速发生变化时,叶尖速比也会随之改变,从而导致风能利用系数一直变化,最后风轮机输出的功率也在一直变化,而并不是一直以最大功率输出。
一个特定的定桨距风力机具有唯一的可使Cp达最大值的叶尖速比,称为最佳叶尖速比λopt,其对应的Cp为最大风能利用系数Cpmax。从图2中可知,当β=0时对应的最大风能利用系数Cpmax=0.45,此时对应得出最佳叶尖速比λoptimal。
当外界风速不断变化时,不断调整发电机转速,使叶尖速比维持在一个最优值λopt,所以此时风能利用系数Cp也是维持在最大值Cpmax,保证风力发电系统能产生最大的风能。
这天蒋利学也很惬意,他惬意的原因是这天上午的学术报告做的非常成功。做完报告,主席台上下响起了一片经久不息的掌声。以前他也多次参加过类似的学术研讨会,也上主席台做过报告,做完报告,也获得了一片赞誉,一片掌声。但那些赞誉和掌声远没有今天的赞誉和掌声来的激烈,尤其是在国家卫生部有关领导的带领下,掌声愈发显得热烈,也愈发显得经久不息。研讨会结束,卫生部领导还在省厅和市局主要领导陪同下接见了蒋利学,并在会见后亲切地和他留影留念。
根据最大风能跟踪理论,推导出发电机最优转速参考值为

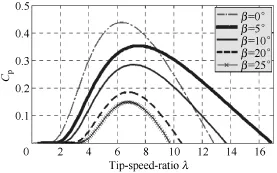
图2 风能利用系数和叶尖速比、桨距角关系
5 滑模控制器设计
5.1滑模控制理论
滑模变结构控制是变结构控制系统的一种控制策略,这种控制策略与常规控制的根本区别在于控制的不连续性,即具有一种使系统“结构”随时间变化的开关特性。该控制特性可以迫使系统在一定特性下沿规定的状态轨迹作小幅度、高频率的上下运动,即所谓的滑动模态或“滑模”运动。这种滑动模态是可以设计的,且与系统的参数及扰动无关,这样,处于滑模运动的系统就具有很好的鲁棒性。
针对如下非线性控制系统进行设计[7]:

式中,x∈ℜn是状态矢量,f(x,t)∈ℜn,B(x,t)∈ℜn× m,u∈ℜm是控制矢量。由式(14)所示的被控系统,可设滑模面S满足以下表达式:

要使状态变量在滑模面上运动,必须满足如下两个条件:

该控制率满足的先决条件是控制器为如下形式:

由式(17)知:

设定Lyapunov函数为

根据Lyapunov稳定性理论,保证滑模控制的全局收敛和稳定性,需满足以下表达式:

本文设计控制器采用如下形式的滑模面:

式中,e(x)是误差矢量(e(x)=x*−x),λx是一个正常数,n是系统的阶数。
5.2滑模控制器设计
为了设计滑模变结构的速度控制器,将式(12)变形为

选取发电机转速误差函数作为滑模面函数,表达式为

滑模面的导数为

滑模控制器的设计时,除了保证在正常运动段滑动模态的可达性,最好还要改善在这段运动的动态品质,在一定程度上,可以用规定“趋近律”的方法来加以控制。本文选取如下指数趋近律:

式中,0ε>,0k>,上式后半部分为指数趋近项,当S较大时,系统能以较大的速度趋近于滑动模态,但是单纯的指数趋近,运动点在逼近切换面的时候只是一个渐近的过程,不能保证在有限时间内到达,所以增加一个等速趋近项,当S趋近于零时,趋近速度为ε而非零,可以保证在有限时间内到达。
由式(19)至式(21)的证明过程可知,应用到本控制器中,能保证,所以设计控制是稳定的。
由式(14)、式(23)、式(25)和式(26)可推导出最优转矩的参考值为

6 仿真
风力机参数:叶片半径R=2.5m,空气密度为1.25kg/m3,最大风能利用率0.48,最佳叶尖速比λ=7,齿轮箱增速比Kg=6.25,额定功率6kW,机械传动效率η=0.95,系统时间常数为0.2s,风轮转动惯量Jw=3kg⋅ m2
双馈感应发电机参数:额定功率6kW,发电机极对数 np=2,发电机时间常τg=0.2,发电机额定电压220V,定子电阻 Rs=1.265,转子电阻Rr=1.430,定子电感 Ls=0.1452,转子电感Lr=0.1452,定转子互感 Lm=0.1397,发电机转动惯量Jg=0.01kg⋅ m2。
为检验控制器的效果,整个双馈风力发电系统在随机风速作用下进行仿真研究,输入的随机风速曲线如图3所示。在此风速下,要求风力机转速能跟随风速变化,保持最佳叶尖速比运行,使输出功率在最佳运行区间,实现最大风能追踪控制。仿真时间设定为40s。

图3 风速仿真曲线
由图4和图5的对比可知,在滑模控制作用下的双馈风力发电系统,叶尖速比基本维持在最优值7附近,无较大波动。图6和图7风能利用系数的对比再次验证滑模控制器的控制效果更好。图8和图9表明,在随机风速变化的情况下,滑模控制能使风力机更好的跟随风速的变化,实现最大风能跟踪控制。

图4 传统PID控制

图5 滑模控制

图6 传统PID控制

图7 滑模控制

图8 传统PID控制
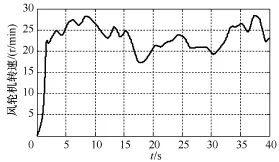
图9 滑模控制
7 结论
通过对6kW双馈风力发电系统的仿真研究,本文提出的非线性最大风能追踪控制方法,相比于传统的PID控制,实现了风力发电系统的优化运行,保证了系统能快速跟随外界风速的变化,维持最佳叶尖速比,使整个风电机组运行在最优区域,实现了最大风能追踪控制。
[1] 钟沁宏,阮毅,赵梅花,等. 变步长爬山法在双馈风力发电系统最大风能跟踪控制中的应用[J]. 电力系统保护与控制,2013,41(9)︰67-73.
[2] 付明晓,李守智. 变速恒频风力发电系统最大风能追踪的控制[J]. 电力系统及其自动化学报,2013,25(1)︰74-78.
[3] 张凤,阎秀恪,兰宏光,等. 基于滑模控制的风机最大风能追踪[J]. 沈阳工业大学学报,2014,36(6)︰625-630.
[4] 秦斌,周浩,邱丽,等. 基于模糊滑模控制的风力发电系统最大风能追踪[J]. 上海交通大学学报,2014,48(7)︰993-997,1003.
[5] 郑雪梅,李琳,徐殿国. 双馈风力发电系统最大风能追踪滑模变结构控制[J]. 控制理论与应用,2010,27(7)︰923-926.
[6] 颜康. 变速恒频双馈风力发电机的最大风能跟踪控制[D]. 沈阳︰沈阳工业大学,2015.
[7] 王丰尧. 滑模变结构控制[M]. 北京︰机械工业出版社,1995.
Optimal Control of Doubly Fed Induction Generator Systems
Liu HaiyingGuan Ping
(School of Automation,Beijing Information Science and Technology University,Beijing100192)
A nonlinear control method based on the sliding mode theory is presented for the doubly fed wind power generation system. The difference between the speed and the optimal speed of the wind turbine is selected as the sliding mode controller. In addition,the control system adopts the vector control technology of stator flux orientation,and realizes the decoupling control of active power and reactive power. Finally,according to the wind turbine optimal power curve,doubly fed wind power generation system of 6kW for maximum wind power tracking control is studied. Simulation results show that the under the given stochastic wind speed,wind turbine remained optimal tip speed ratio and the maximum wind energy utilization coefficient,achieving the maximum output power and maximum power point tracking control,reducing the mechanical load.
double-fed induction generator system; wind turbines; maximum power point tracking control; sliding model control
刘海营(1988-),男,汉族,河北唐山人,主要研究方向:智能非线性控制在双馈风力发电系统中应用。
