移动水下网络的协作跟踪研究
2016-08-12宁学侃
宁学侃
【摘要】 水下传感器系统的一个主要需求是跟踪水下目标的位置,通常的跟踪方式是利用水面浮标依靠惯性导航和声学测距设备在时间上估计节点位置。不过这种方仅适用于少量水下设备,却并不适用水下网络。水下网络的设备可以依靠协作定位技术来跟踪,但仅是像网络的时间快照那样估计节点位置,且其在网络稀疏分布情形下就失去效果。本文设计提出一种创新方法——“协作跟踪”,其结合了现有方法的优点并克服了它们的缺点。通过仿真完成了4D跟踪估计,验证了该方法的有效性,利用时间和空间维度可将其有效地运用到水面浮标和网络连接均稀疏的区域。
【关键词】 水下网络 跟踪 移动性 声学网络
一、概述
将大量的水下传感设备组网应用已经引起了人们广泛的兴趣[1,2]。在这种网络系统中,明确水下传感器的位置是必要的。没有位置信息,不但传感器数据的空间关系将丢失,而且也不可能的有效地导航。在广泛多样的水下传感网络中,本文主要研究含有移动设备的水下网络系统。移动设备主要包括自驱动的设备(如远程控制的水下载体或ROV)、源于垂直运动移动性的设备(水下滑翔机)或随着水下涌流被动飘浮的设备(水下浮标)。在这些移动水下网络情形下,定位并不是一次性的事情、其须随着时间不断进行测量。
二、协作跟踪
独立跟踪是时间维的算法,其将需处理的一组设备看作是一定数量独立实体、本质上是分别跟踪每一个设备[3],这种算法需要外部周期的位置更新来弥补船位推算的积累误差。该方法对单个设备很有效,但当研究设备总体时有很多缺陷,首先它不能随设备数量的增加而有很好的适应性;其次在移动网络中,元件会偶然脱离水面转发器的距离范围;而且当外部更新变得稀疏而且船位推算误差增加,这种算法就会失效。这种问题的原因就是仅仅在时间维考虑信息,把每一个器件单独的看做是一个独立的线,它完全忽略了空间维。
本文采用的是时空维的协作跟踪算法,时间(用导航设备的船位推算法)和空间(设备间的距离测量)维度将会同时应用。在移动网络系统中,水下目标跟踪问题将会被看做是4维的。节点轨迹形成了一组相关的线。虽然最自然的方法就是融合协作定位于传统跟踪。由协作定位获得的位置估计可以作为外部的信息对跟踪更新;且从导航设备获得的数据可以用来插值于周期协作位置估计。我们的方法是依靠从声学调制解调器和导航器件所获得的距离估计。
三、算法
协作跟踪可以看做是一个复杂的多维时空估计问题,其目的是通过全部的概率分布函数来找到最大似然估计,同时在时空维获取所有器件的位置信息。本文采用因子图算法能够综合所有时空信息并提供有效的合作跟踪。因子图提供了一种依照简单的由变量子集所组成的局部函数的方式来表示全局函数(多维概率分布)的方法。和积算法能对在这种图上运作,并通过迭代信息传递、利用简单的关系来估计全局函数。
3.1因子图描述
首先用如图1所示的因子图描述协作跟踪问题。它给出了一个在时空中设备未知位置相关性的图形描述。首先,我们可以观察到有3个垂直分布的主链堆。每一个主链捕获未知节点的轨迹,而水平维度表示时间。圆圈表示需要被估计的状态变量,其是固定时间间隔的节点位置(Pi,j是节点i在时间j的位置)和速度(Vi,j)。不同类型的方块将这些状态变量联系起来。这些方块是函数节点,不但表示状态变量是有联系的,而且表示出它们是如何联系的。
3.2和积算法
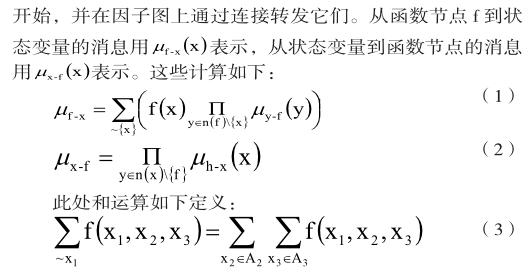
X是f的参数集合;n(ω)\{x}表示因子图上给定节点ω相邻节点的集合,包括节点x。
这两种类型的消息建立了因子图内部运作关系。其运作如下:状态变量向所有相邻函数节点发送它们最近分布的估计,而函数节点发送其相邻状态变量分布的估计。向外的数据由上一次根据公式(1)和(2)迭代的输入数据梳理而产生。状态变量通过由其相邻函数节点根据公式(2)所提供的相互交叉并独立的分布估计来估计它的分布(或向外的消息)。函数节点通过执行由公式(1)所提供的局部似然函数的边缘化来产生向其相邻状态变量的消息。
四、仿真与结论
下面将通过方针来评估我们算法的性能。系统空间设置:500m×500m,最大深度为20m。设定系统测距最大误差2m,导航精度为2度,加速度估计精度为0.04cm/s2,节点假定为粗时间同步的(±0.1s),并且每20s重复距离估计。水下载体以一个随机生成的平滑路径在0~2m/s间不断变化的速度移动。
首先,比较协作跟踪和重复协作定位之间的性能差异。先考虑一个有较少浮标的情形,本例中是2个,网络自身包括6个独立移动的水下载体,声学调制解调器的传播距离被选择为200m。可以看到协作跟踪可以提供好的位置估计。通过在不同设定和不同参数下仿真评估我们的算法,都得到了类似的结果,说明了协作跟踪算法可以在不同的网络环境下有效的跟踪定位水下目标。
参 考 文 献
[1] J. Jaffe, C. Schurgers, “Sensor networks of freely drifting autonomous underwater explorers,” WUWNET06, 2006.[2] Z. Zhou, J.-H. Cui, A. Bagtzoglou, “Scalable Localization with Mobility Prediction for Underwater Sensor Networks”, WUWNET07, 2007.
[3] M. Erol, L. Vieira, M. Gerla, “Localization with DiveNRise (DNR) beacons for underwater acoustic sensor networks,” WUWNET07, 2007.
