山地果园蓄电池驱动单轨运输机的设计
2016-07-02洪添胜孙同彪欧阳玉平罗瑜清
李 震,洪添胜,孙同彪,欧阳玉平,罗瑜清
(1 华南农业大学 a 电子工程学院,b 工程学院,广东 广州510642;2 国家柑橘产业技术体系机械研究室,广东 广州510642;3 广东省农情信息监测工程技术研究中心,广东 广州 510642)
山地果园蓄电池驱动单轨运输机的设计
李震1a,2,3,洪添胜1b,2,孙同彪1b,2,欧阳玉平1b,2,罗瑜清1b,2
(1 华南农业大学 a 电子工程学院,b 工程学院,广东 广州510642;2 国家柑橘产业技术体系机械研究室,广东 广州510642;3 广东省农情信息监测工程技术研究中心,广东 广州 510642)
[摘要]【目的】 设计和制作山地果园蓄电池驱动单轨运输机,以降低山地果园运输作业的工作风险和劳动强度,提高运输效率。【方法】 对由运输机和货运拖车组成的运输机构进行爬坡受力分析,获得满足运输机构爬坡要求的最小牵引力;设计和制作了运输机驱动机构、传动装置、限位装置等关键部件,并对直流无刷电动机、电动机控制器、电磁制动装置、蓄电池进行选型,设计制作以蓄电池为动力、使用无刷直流电动机驱动的山地果园单轨运输机。最后通过行驶速度、工作噪声、电流损耗和蓄电池组续航能力试验,对运输机的工作效果进行检验。【结果】 所设计制作的山地果园蓄电池驱动单轨运输机可以搭载0~100 kg负载,在平地的行驶速度为0.60~0.58 m/s,行驶速度受装载质量影响较小;爬39°斜坡时的速度为0.45~0.28 m/s,行驶速度受装载质量影响较大;运输机工作时的最大噪声为83.87 dB。选用的蓄电池组在满充条件下,可支持运输机搭载100 kg负载爬坡行驶2 700 m。【结论】 设计制作的运输机的各项技术指标均达到了设计要求,进一步的改进中将通过引入变档机构实现变速比可调,解决满载爬坡时蓄电池输出电流过大的问题。
[关键词]山地果园;单轨运输机;蓄电池驱动;农业机械
发达国家的柑橘生产区域相对集中,橘园规模较大,机械化程度较高,规模效益明显[1]。我国南方柑橘生产的立地条件多为山地和丘陵,种植和采收过程中农资物料和果品的运输以人力为主,生产效率低、劳动强度大。随着劳动力的日益紧缺,柑橘等山地果品生产过程中机械化运输的作用日趋体现[2-4]。
山地果园的地形地貌特征为坡度陡、山路曲折迂回、弯曲处密集,难以开展机械化运输作业。近年来,我国山地果园机械化运输技术取得了较大的发展。国家柑橘产业技术体系机械研究室研制了山地果园链式循环货运索道[5-7]、钢丝绳牵引式双轨运输机[8]、自走式双轨道山地果园运输机[9]、遥控单轨运输机[10-11]、自走式履带运输车[12]等一系列适合我国山地果园作业的机械化运输装备,除运送采摘的水果,还可以运送肥料和农药等农用物资,并可以搭载其他作业机具,有效提高了我国山地果园物品运输的机械化水平。在已有的山地果园运输机械中,单轨运输机因其结构简单、轨道铺设灵活、安装及操作性能好等特点,在山地果园机械化运输中的应用较为广泛[13-14]。
现有的山地果园单轨运输机多以内燃机为动力,在启停时需人工操作,为了能够及时应对出现的紧急情况,要求操作人员乘坐运输机或跟随运输机在果园中穿梭,导致操作人员的工作风险较大、劳动强度较高。通过遥控或自动控制运输机工作,则能够降低操作人员的工作风险和劳动强度,但在已有的以内燃机为动力的山地果园单轨运输机的基础上实现遥控或自动控制,则还需要设计和制作较复杂的机构,且成本升高,维护难度增大,不利于推广应用。
电动机启停简单,易于开发遥控和自动控制系统,将其作为山地果园运输装置的驱动机构具有一定的优势。本研究在已有的以内燃机为动力的山地果园单轨运输机的基础上,对山地果园蓄电池驱动单轨运输机的关键部件进行研制和选型,设计和制作试验样机并检验其工作效果,以期降低山地果园运输作业的工作风险和劳动强度,提高运输机的自动化水平和运输效率。
1运输系统的结构与主要技术参数
1.1系统结构
山地果园电动单轨运输系统结构如图1所示[15]。该系统主要由运输机、货运拖车和轨道组成。轨道通过轨道支撑架沿果园山坡铺设,轨道下方具有啮合齿节;运输机和货运拖车均骑跨在轨道上方。货运拖车与运输机通过连接机构连接,由运输机拖动或推动拖车行走。运输机包括主机架、电动机、蓄电池、传动装置、导向夹紧轮、制动器和控制系统等。货运拖车由不锈钢管焊接而成,主要由车架、防侧倒装置和位于拖车底部的4个滚轮组成,防侧倒装置和滚轮通过螺栓与拖车连接在一起。
1.2工作原理
运输机以蓄电池为动力,由控制系统控制直流电动机旋转,电动机上的链轮通过主动链条将动力传递给蜗轮蜗杆机构减速箱的主链轮,减速箱的副链轮通过从动链条将动力传递给运输机驱动链轮;驱动链轮通过驱动轮轴与主驱动轮相接,主驱动轮采用圆周分布的圆柱滚子与轨道齿条相啮合,随驱动链轮一起转动,带动运输机行走。
运输机主机架前后两端安装有行程开关,轨道两端安装了辅助停车挡板,当运输机行走至轨道两端时,安装在车体上的行程开关触碰挡板,行程开关的通断向运输机控制系统发出制动信号,控制电动机断电和电磁式失电制动器制动。
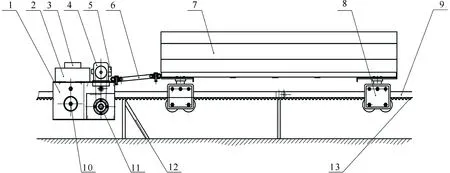
图 1山地果园遥控电动单轨运输系统的结构
1.运输机;2.电池箱;3.控制系统;4.电动机;5.制动器;6.连接机构;7.货运拖车;
8.防侧倒装置;9.轨道;10.导向夹紧轮;11.传动装置;12.轨道支撑架;13.轨道齿条
Fig.1Structure of the remote control electric-drive monorail transportation system for mountain orchard
1.Transporter;2.Battery box;3.Control system;4.Electric motor;5.Brake;6.Connector;7.Cargo trailer;
8. Side falling prevention device;9.Trail;10. Clamping wheel;11.Transmission device;12.Trail support frame;13.Trail rack
控制系统可接收来自运输机上的按键或遥控器的控制信号,根据该信号控制直流电动机的启停、正/反转以及电磁式失电制动器的制动和解除等工作。系统监测直流电动机的转速,当电机转速超过其正常运行速度的上限时,启动制动器进行制动。
1.3主要技术参数
除收获时运送采摘的果品外,运输系统日常作业主要是运送化肥和农药等物资,也可以搭载树枝修剪机和喷雾机等装置。根据实际运输需要以及橘园的地形地貌条件,确定山地果园蓄电池驱动单轨运输机的主要技术参数如表1所示。其中工作噪声指标参照国标(GB 6376)规定的44.1 kW及以下拖拉机机室外动态环境噪声设计,限值为86 dB[16]。

表 1 设计运输机的主要技术参数
2爬坡受力分析
对由运输机和货运托车组成的运输机构进行受力分析,以指导电动机选型。在实际应用中,沿山地果园地形安装的轨道坡度一般小于40°,水平弯曲较小。研究中将运输机构简化为质点O,忽略空气阻力和驱动轮与轨道侧边的摩擦。运输机构在匀速爬坡时主要受到自身重力、牵引力和齿轮啮合摩擦力的作用,受力情况如图2所示。
运输机构在匀速爬坡时的受力分析为[11]:
(μMgcos40°+Mgsin40°)/k。
(1)


3运输机关键部件设计
3.1运输机驱动机构
单轨运输机应用齿轮啮合驱动,具有驱动力大、运行平稳等优势,在以内燃机为动力的山地果园单轨运输系统中得到成功应用。借鉴汽油机驱动式单轨运输机的设计思路和啮合方式[17],山地果园蓄电池驱动单轨运输机的驱动轮采用圆周分布的圆柱滚子与轨道啮合齿相啮合,以带动运输机行走的驱动方式。根据轨道啮合齿的间距,本研究设计的驱动轮上设置有12个圆柱滚子,其中2对滚子沿直径相对,其间的距离即驱动轮有效直径d=12 cm,具体如图3所示,

图 2 运输机构爬坡受力分析
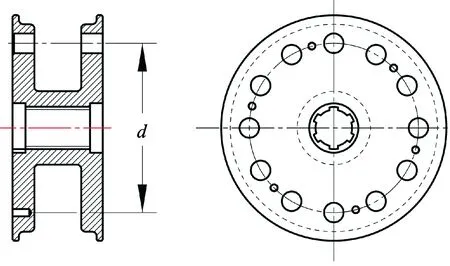
图 3 运输机主动驱动轮的结构
3.2运输机传动装置
运输机的传动装置设计和实物如图4所示。该传动装置使用了两级链传动和一级蜗轮蜗杆传动,根据文献[18],链传动的效率为0.91,蜗轮蜗杆传动的效率为0.77,传动装置的传动效率η为:η=0.91×0.91×0.77=0.64。
传动装置的总传动比i为:
i=i1×i2×i3,
(2)
(3)
(4)
式中:i1为1、2链轮之间的传动比(一级链传动比);i2为3、4链轮之间的传动比(二级链传动比);i3为蜗轮蜗杆机构传动比,i3=0.1;z1为链轮1的齿数,z1=12;z2为链轮2的齿数,z2=13;z3为链轮3的齿数,z3=27;z4为链轮4的齿数,z4=18。
将齿轮z1~z4代入式(3)、(4),得i1=0.923,i2=1.500,则总传动比i=0.138。
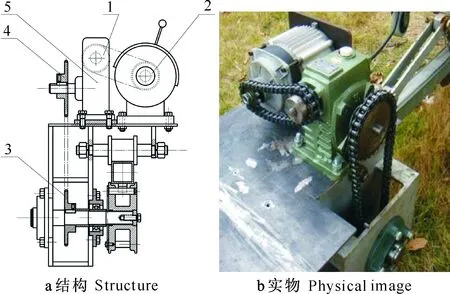
图 4 运输机传动装置的结构与实物
3.3电动机及控制器
运输机爬坡时的功耗为:
(5)


对电动机转速的要求为:
(6)
式中:R为电动机最低转速,r/min;v1为运输机最大平地运行速度,0.8 m/s;i为总传动比,0.138;d为驱动轮有效直径,0.12 m。
则计算可得电动机的最低转速R=923 r/min。
根据运输机爬坡时的功耗,考虑直流电动机自重对运输机整机质量和功耗的影响,选用BM1418ZXF型无刷直流电动机(浙江尤奈特电机有限公司,浙江永康),该机的额定电压为48 V、额定功率为500 W,额定转速为2 800 r/min。
电动机控制器采用与电动机配套的无刷直流电机控制器(FSBWZK124830-3KD-C,浙江尤奈特电机有限公司,浙江永康),用于控制无刷直流电动机的启停、转向和转速。
3.4电磁制动装置
运输车在保证涡轮蜗杆减速器工作在自锁有效状态的同时,加装了电磁制动装置,以实现运输机在坡度轨道上的制动和下坡时的速度可调。选用的电磁制动装置为可手动解除制动状态的电磁断电型抱闸制动器(DHD4,腾讯机电有限公司,浙江诸暨),电动机制动轴与制动器的制动盘通过花键配合方式连接,制动器断电时,制动器衔铁夹紧与电动机制动轴相联的制动盘以实现运输机的制动,通过解除制动扳手可以手动解除运输机的制动状态;制动器的制动力矩为40 N·m,在运输机超载时仍有较大的力矩余量,以提高运输机的工作安全性。
3.5蓄电池组
运输机的蓄电池需满足3个要求:1)高容量、高功率,大电流性能较好;2)价格低、循环寿命长且容量衰减小;3)体积小、质量轻。铅酸蓄电池技术成熟,性能稳定,价格较低,适合作为运输机的动力源。由于选型的无刷直流电动机额定工作电压为48 V,而市场上常见的蓄电池充电设备支持的电池电压为12 V,本研究选用4块额定电压为12 V的铅酸蓄电池串联为蓄电池组。
运输机爬坡时的功耗为433 W,按照每天工作3 h计算,需要的电能为1.299 kW·h。蓄电池电量计算为:1.299 kW·h/48V=27.0 Ah。据此,选用市场上常见的12 V(28 Ah)铅酸蓄电池串联为蓄电池组,作为运输机的动力源。
3.6限位装置
为防止运输机行驶到轨道末端时脱轨,本研究设计了限位装置如图5所示。限位装置由行程开关及限位档杆组成,行程开关安装于运输机的下方,限位档杆安装在轨道始末两端。在行驶过程中,当限位开关与限位档杆接触时,限位开关闭合,运输机上的控制系统通过电动机控制器使无刷直流电动机停止转动,同时控制系统实施制动,令运输机停止行驶。
4运输机工作效果测试
4.1测试场地与材料
试验在华南农业大学实验柑橘园进行,平地测试距离为30 m,受场地条件限制,轨道平地段铺设成半径为5 m的圆弧形[19-20];由于该半径已大于运输机的最小转弯半径,可近似认为运输机是沿直线行驶[11]。模拟山坡地形架设坡度为39°的直行轨道用于运输机爬坡测试,爬坡测试距离为15 m,如图6所示。

图 5 轨道限位装置的安装

图 6 模拟山坡地形架设的直行轨道
试验条件为:运输机及货运拖车的联合自重约75 kg,试验负载为密封水桶,单桶最大盛水量15 kg,试验时忽略水桶的自重;负载变化范围0~100 kg,以10 kg为单位递增,设计0,10,20,30,40,50,60,70,80,90,100共11种负载质量,负载0 kg时为空载,负载100 kg时为满载;每次试验时蓄电池组均充满电。
4.2行驶速度测试
设定电机控制器,使直流电动机工作在允许的最高转速;利用秒表(Casio HS-30W,深圳市伊商信电子科技有限公司,深圳)测量货运拖车搭载不同质量负载条件下,运输机平地和爬坡行驶固定距离所需的时间,用行驶距离除以时间计算平均行驶速度。每种负载条件进行5次试验,取5次试验的平均值作为最终结果。对装载质量和运输机在平地和爬坡时的平均行驶速度进行相关分析,计算相关系数的平方(R2),检验行驶速度与装载质量间的相关性。不同负载条件下运输机行驶速度的测试结果如表2所示。
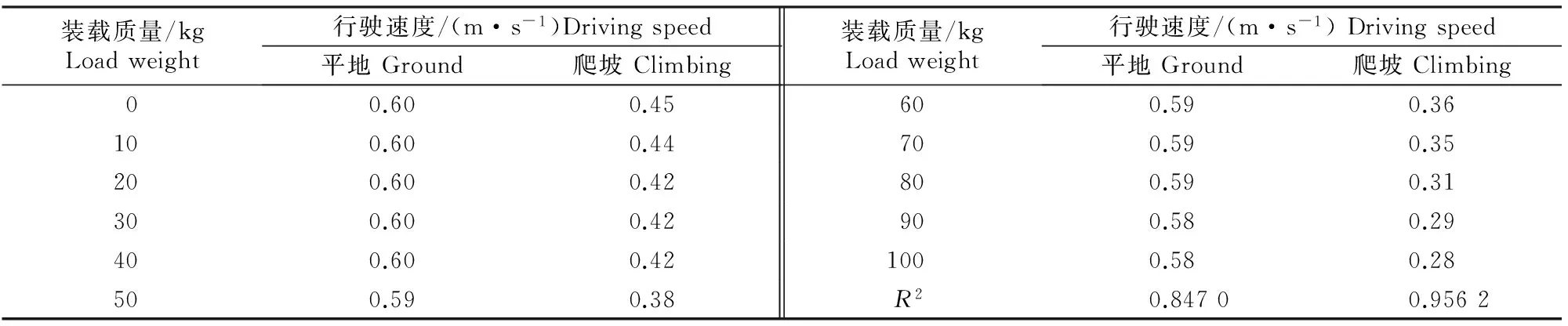
表 2 山地果园蓄电池驱动单轨运输机不同负载时的行驶速度
由表2可知,运输机及货运拖车搭载0~100 kg负载时的平地行驶速度基本稳定在0.60 m/s,爬坡时的最小行驶速度为0.28 m/s,满足表1中运输机行驶速度的设计要求;平地行驶时,运输机在空载和满载条件下的行驶速度分别为0.60和 0.58 m/s,装载质量与行驶速度间的R2为0.847 0,说明行驶速度受装载质量影响较小;爬坡时,运输机在空载和满载条件下的行驶速度分别为0.45 和0.28 m/s,装载质量与行驶速度间的R2为0.956 2,说明行驶速度受装载质量影响较大。
4.3工作噪声测试
直流电动机工作在允许的最高转速,利用噪声计(824A,深圳市胜利高电子科技有限公司,深圳)测量环境噪声及货运拖车满载条件下运输机在平地行驶和爬坡时的工作噪声,以5次测量的平均值作为最终结果。结果表明,运输机在平地运行时的工作噪声为77.57 dB,爬坡时的工作噪声为83.87 dB,均低于国标(GB 6376)规定的44.1 kW及以下拖拉机机外动态环境噪声限值86 dB,满足表1中工作噪声的设计要求。
4.4电流损耗测试
直流电动机工作在允许的最高转速,运输机及货运拖车从轨道的平地端开始运行,爬坡至顶端后停止,试验中货运拖车分别搭载0,50和100 kg的负载。在蓄电池的输出端串联电流感应传感器(ACS712ELC-20A,Allegro Microsystems LLC,美国),采用数字万用表(Keithly 2700,Keithley Instruments Inc.,美国)测量货运拖车搭载不同负载时电流感应传感器的输出电压,按照下式换算为输出电流[21],试验结果如图7所示。
Io=10×(Vo-2.5)。
(7)
式中:Vo为电流感应传感器的输出电压,V;Io为蓄电池的输出电流,A。
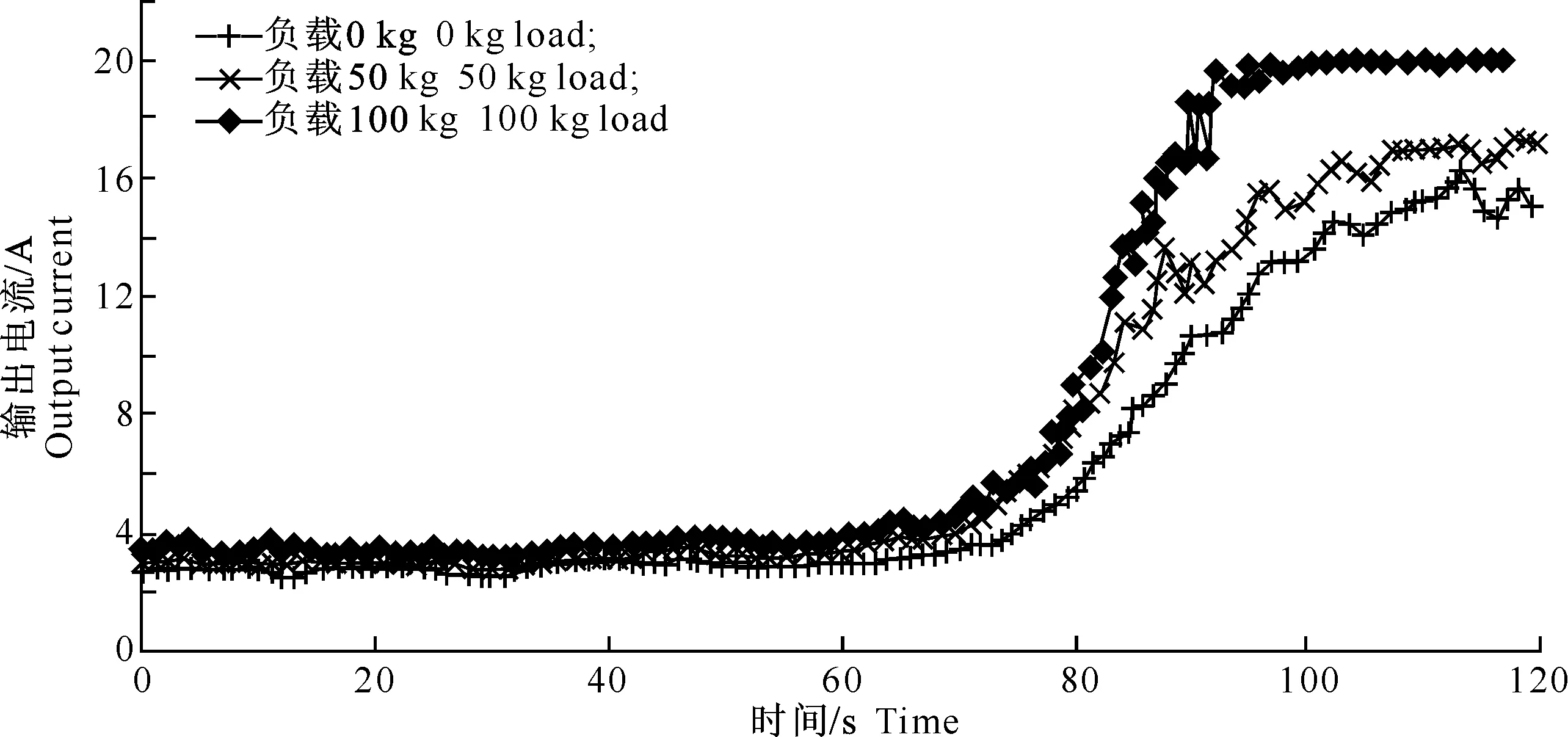
图 7 运输机平地行驶和爬坡时蓄电池的输出电流
如图7所示,试验的0~60 s运输机在平地行驶,60~80 s为平地到爬坡的过渡阶段,80 s后为爬坡阶段。由图7可以看出,运输机在平地行驶时,随着装载质量的增加,蓄电池输出的电流有所增加,但3条曲线差别不明显;在过渡阶段,由于运输机的惯性作用和轨道坡度逐渐增加到39°,蓄电池输出的电流增加比较缓慢,3条曲线也未出现明显分化;当轨道坡度达到39°后,蓄电池输出的电流迅速增加,装载质量越大,输出电流的增加速度越快;当装载质量为100 kg,运输机完全依靠电动机驱动爬坡时,蓄电池输出的电流超过20 A,试验中选用的电流感应传感器输出达到饱和,说明此时蓄电池的输出电流过大。
4.5蓄电池组续航能力测试
直流电动机工作在允许的最高转速,运输机和货运拖车搭载100 kg负载从轨道坡度段底端行驶至顶端,松开电池制动器,让运输机依靠自身重力回落至轨道底端,记录蓄电池无法为运输机爬坡提供足够的电流前运输机爬坡的次数,重复进行3次试验,以3次试验平均值作为试验结果。试验表明,蓄电池组一次充满电可支持运输机爬坡约180次,爬坡行驶距离约2 700 m。因此,在山地果园实际轨道长度为100~200 m、运输机搭载100 kg负载的条件下,蓄电池组充满电的条件下可支持运输机爬坡 13~27次。
5结论
本研究在已有的以内燃机为动力的山地果园单轨运输机的基础上,设计和制作了山地果园蓄电池驱动单轨运输机,通过行驶速度、工作噪声、电流损耗和蓄电池组续航能力等4个测试试验,检验了运输机的工作效果,得到以下结论:
1)运输机及货运拖车的联合质量约为75 kg,无刷直流电动机功率为500 W,货运拖车搭载质量为100 kg的负载在平地运行和爬39°斜坡时的行驶速度分别为0.58和0.28 m/s,运输机工作时的最大噪声为83.87 dB,各项指标均达到了设计要求。选用的蓄电池组在充满电的条件下,可支持运输机搭载100 kg负载爬坡行驶2 700 m。
2)运输机在平地行驶和爬坡时,装载质量与行驶速度间的R2分别为0.847 0和0.956 2,说明在平地行驶时速度受装载质量影响较小,而爬坡速度受装载质量影响较大。
3)电流损耗试验结果表明,当运输机搭载质量为100 kg的负载爬坡时,蓄电池输出电流超过20 A,长期工作在大电流输出状态将极大地缩短蓄电池寿命,且存在安全隐患。本试验中,该运输机的变速比是固定的,在进一步的改进中将通过引入变档机构,以解决满载爬坡时蓄电池输出电流过大的问题。
[参考文献]
[1]洪添胜,杨洲,宋淑然,等.柑橘生产机械化研究 [J].农业机械学报,2010,41(12):105-110.
Hong T S,Yang Z,Song S R,et al.Mechanization of citrus production [J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):105-110.(in Chinese )
[2]刘滨凡,王立海.单轨车的发展及在我国林业中的应用 [J].森林工程,2008,24(1):25-27.
Liu B F,Wang L H.Development of monorail and its application in forestry in China [J].Forest Engineering,2008,24(1):25-27.(in Chinese)
[3]陈世林.夷陵区标准柑橘园建设技术路线 [J].中国果业信息,2010,27(5):22-23.
Chen S L.Construction technique route of standardized orchards in Yiling district [J].China Fruit News,2010,27(5):22-23.(in Chinese)
[4]Yamamoto S,Kanamiitsu M,Ajiki K,et al.New technologies and systems for high quality citrus fruit production,laborsaving and orchard construction in mountain areas of Japan [J].Journal of Mountain Science,2005,2(1):59-67.
[5]洪添胜,苏建,朱余清,等.山地橘园链式循环货运索道设计 [J].农业机械学报,2011,42(3):108-111.
Hong T S,Su J,Zhu Y Q,et al.Circular chain ropeway for cargo transportation in mountain citrus orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(3):108-111.(in Chinese)
[6]杨洲,李雪平,李君,等.果园钢索牵引悬挂式货运系统关键部件设计 [J].农业工程学报,2014,30(7):18-24.
Yang Z,Li X P,Li J,et al.Design on key parts of cable-driven hanging transportation system for orchard [J].Transactions of the CSAE,2014,30(7):18-24.(in Chinese)
[7]文韬,洪添胜,朱余清,等.山地果园索道张紧调节自动控制装置的设计 [J].农业工程学报,2011,27(6):128-131.
Wen T,Hong T S,Zhu Y Q,et al.Design of automatic control device for ropeway tension adjustment in hilly orchard [J]. Transactions of the CSAE,2011,27(6):128-131.(in Chinese)
[8]李震,卢加纳,洪添胜,等.山地果园钢丝绳牵引货运机超声波避障系统 [J].农业机械学报,2011,42(10):116-120.
Li Z,Lu J N,Hong T S,et al.Obstacle avoiding system of mountain orchard steel wire rope traction cargo vehicle based on ultra-sonic sensor [J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(10):116-120.(in Chinese)
[9]李善军,邢军军,张衍林,等.7YGS-45型自走式双轨道山地果园运输机 [J].农业机械学报,2011,42(8):85-88.
Li S J,Xing J J,Zhang Y L,et al.7YGS-45 type self-propelled dual track mountain orchard transport [J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(8):85-88.(in Chinese)
[10]张俊峰,李敬亚,张衍林,等.山地果园遥控单轨运输机设计 [J].农业机械学报,2012,43(2):90-95.
Zhang J F,Li J Y,Zhang Y L,et al.Design of remote control monorail transporter for mountainous orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2012,43(2):90-95.(in Chinese)
[11]陈银清,洪添胜,孙同彪.山地果园单轨货运机的最小转弯半径及最大承载量分析 [J].农业工程学报,2012,28(S1):50-56.
Chen Y Q,Hong T S,Sun T B.Analysis on minimum turning radius and maximum carrying capacity on monorail vehicles for mountain orchard [J].Transactions of the CSAE,2012,28(S1):50-56.(in Chinese)
[12]朱余清,洪添胜,吴伟斌,等.山地果园自走式履带运输车抗侧翻设计与仿真 [J].农业机械学报,2012,43(Z1):19-23.
Zhu Y Q,Hong T S,Wu W B,et al.Design and simulation of side rollover resistant capability of tracked vehicle for mountain orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2012,43(Z1):19-23.(in Chinese)
[13]张小江,高秀华,王云超,等.车辆转向统一动力学模型及模型跟踪控制 [J].农业工程学报,2009,25(11):173-177.
Zhang X J,Gao X H,Wang Y C,et al.Unified dynamical model of vehicle steering and model-following control [J].Transactions of the CSAE,2009,25(11):173-177.(in Chinese)
[14]战廷文,张学锋,刘长乐,等.单轨货运机应用现状 [J].林业机械与木工设备,2008,36(12):45-47.
Zhan T W,Zhang X F,Liu C L,et al.Application status of monorail vehicles [J].Forestry Machinery & Woodworking Equipment,2008,36(12):45-47.(in Chinese)
[15]孙同彪.山地果园电驱动单轨运输机的研制及试验 [D].广州:华南农业大学,2012.
Sun T B.Development and experiment of an electric drive monorail vehicle for mountain orchards [D].Guangzhou:Sou-th China Agricultural University,2012.(in Chinese)
[16]中国机械工业联合会.GB16151.1-2008农业机械运行安全技术条件 [S].北京:中国标准出版社,2008.
China Machinery Industry Federation.GB134151.1-2008Safe technical requirements for agricultural machinery operating [S].Beijing:China Standard Press,2008.(in Chinese)
[17]刘滨凡.森林生态型单轨运输设备安全稳定研究 [D].哈尔滨:东北林业大学,2009.
Liu B F.The safe and stable research of forest ecotype’s transporting of monorail vehicle [D].Harbin:Northeast Forestry University,2009.(in Chinese)
[18]闻邦椿.机械设计手册: 第3卷 [M].北京:机械工业出版社,2010.
Wen B C.Machine Design Handbook:Volume 3 [M].Beijing:China Machine Press,2010.(in Chinese)
[19]黄小进,唐志辉.消防车道最小转弯半径以及通道宽度的计算 [J].华中建筑,2009,27(11):66-68.
Huang X J,Tang Z H.The Calculation of the minimal turning radius and the setting of the fire road width [J].Huazhong Architecture,2009,27(11): 66-68.(in Chinese)
[20]马广营,李炳文,刘飞,等.支架搬运车最小转弯半径计算及其巷道适应性分析 [J].煤矿机械,2010,31(11):35-36.
Ma G Y,Li B W,Liu F,et al.Calculation of minimum turning radius of transport vehicle for hydraulic support and adaptive analysis of workings [J].Coal Mine Machinery,2010,31(11):35-36.(in Chinese)
[21]罗瑜清.山地果园电动单轨运输车的控制系统 [D].广州:华南农业大学,2013.
Luo Y Q.Control system of electric drive monorail vehicle for mountain orchards [D].Guangzhou:South China Agricultural University,2013.(in Chinese)
Design of battery powered monorail transporter for mountainous orchard
LI Zhen1a,2,3,HONG Tian-sheng1b,2,SUN Tong-biao1b,2,OUYANG Yu-ping1b,2,LUO Yu-qing1b,2
(1 aCollegeofElectronicEngineering,bCollegeofEngineering,SouthChinaAgriculturalUniversity,Guangzhou,Guangdong510642,China;2GuangdongEngineeringResearchCenterforAgriculturalInformationMonitoring,Guangzhou,Guangdong510642,China;3DivisionofCitrusMachinery,ChinaAgricultureResearchSystem,Guangzhou,Guangdong510642,China)
Abstract:【Objective】 Battery powered monorail transporter for mountainous orchard was designed and developed to reduce operation risk and intensity in mountainous orchard transportation.【Method】 Climbing stress analysis was conducted on transportation facility with transporter and cargo trailer to calculate the minimum traction stress for the transporter to climb slope.Key components of the transporter including driving mechanism,transmission,and limiting facility were developed.Other components such as the brushless DC motor,the motor controller,the electromagnetic braking device,and the battery were selected.After fabrication,the battery powered monorail transporter using brushless DC motor was design and developed.The transporter’s working effect was tested through experiments on driving speed,working noise,current consumption and battery pack running ability.【Result】 The designed mountainous orchard battery powered monorail transporter had the driving speed of 0.60-0.58 m/s when running on the ground with the load weight of 0-100 kg.This speed was slightly affected by the load weight.The driving speed was 0.45-0.28 m/s when climbing a steep hill with an angle of 39°,and the speed was critically affected by load weight. The maximum working noise was 83.87 dB and the fully charged battery pack could support the transporter to run 2 700 m in climbing situation.【Conclusion】 Every technical indicator met the design requirements.A shift mechanism will be introduced to the transporter so that adjustable gear ratio could be achieved,which would solve the current overload problem in a full load situation.
Key words:Mountainous orchard;monorail transporter;battery powered;agricultural mechanization
DOI:网络出版时间:2016-05-0314:0510.13207/j.cnki.jnwafu.2016.06.030
[收稿日期]2014-10-29
[基金项目]公益性行业(农业)科研专项(201203016);广东省高等学校优秀青年教师培养计划项目(Yq2013028);现代农业产业技术体系建设专项(CARS-27)
[作者简介]李震(1981-),男,广东广州人,教授,博士,硕士生导师,主要从事机电一体化技术应用研究。
[通信作者]洪添胜(1955-),男,广东梅县人,教授,博士,博士生导师,主要从事机电一体化及信息技术在农业中的应用研究。
[中图分类号]S229+.1
[文献标志码]A
[文章编号]1671-9387(2016)06-0221-07
网络出版地址:http://www.cnki.net/kcms/detail/61.1390.S.20160503.1405.060.html
E-mail:lizhen@scau.edu.cn
E-mail:tshong@scau.edu.cn
