声表面波温度传感器频率分级扫描方法研究
2016-06-24郑天祥
郑天祥,李 璐,陈 硕
(国网智能电网研究院,北京 102200)
声表面波温度传感器频率分级扫描方法研究
郑天祥,李璐,陈硕
(国网智能电网研究院,北京 102200)
摘要:针对声表面波(SAW)谐振腔体的频率响应单侧单调特征,为提高传感器的温度响应速度,提出了一种频率分级扫描方法,将频率扫描分为粗扫频和精扫频两个阶段,以不同的扫频步长依次进行。利用粗扫频确定中心谐振频率所处的频率区间,再在该频率区间内利用精扫频得到腔体中心谐振频率,可将温度传感器扫频时间降为原来的1/7。利用提出的频率扫描方法开展实验研究,分别研究了单个传感器的温度量测不确定度和多个传感器的温度量测一致性,并分析了实验结果。
关键词:声表面波;温度传感器;频率扫描;分级扫描
0引言
电网电压等级的升高对绝缘要求更高,电力设备的温度在线监测需要无线无源型温度传感器[1]。声表面波(SAW)传感技术是一种典型的无线无源传感技术[2],根据应用场景定制传感芯片结构、优化天线设计,可实现2 m和更远距离的无线传输,能满足电网部分电压等级下的绝缘距离要求[3]。
声表面波温度传感器主要采用谐振型结构,温度信息反映在回波信号谐振频率的变化上[4]。为提升传感器的测温响应速度,需尽快检测出声表面波器件的谐振频率。声表面波温度传感器网络一般包含多个温度传感器,按照一定的频率间隔合理设计多个温度传感器的中心频率,保证各个传感器在所测温度范围内中心谐振频率无重叠,组成多设备节点温度传感器网络[5]。提高单传感器的测温响应速度有助于提升电网关键设备温度监测的实时性水平[6]。
本文将介绍谐振型声表面波温度传感器的工作原理和组网方法,研究传感器谐振腔体的频率响应曲线,提出谐振腔体中心频率分级扫描方法,以快速查询传感器中心频率,提高传感器的整体响应速度。开展频率分级扫描方法实验研究,分别研究单传感器与多个传感器的温度测量一致性等问题。
1谐振型声表面波传感器工作原理与组网方法
声表面波温度传感器主要有谐振型和延迟线型两种结构,谐振型结构更适宜较远距离的无线信号收发,是常见的声表面波温度传感结构,其原理如图1所示[7]。工作过程如下:读写器发送某一频率射频信号,经传感器天线进入叉指换能器中,由于压电晶体的逆压电效应,在晶体表面产生声表面波,该波沿晶体表面向叉指换能器两侧传播,每遇到一条反射栅均有一部分波被反射回来,另一部分波透过反射栅继续传播,通过合理设计反射栅的宽度和相邻反射栅间距,各反射栅反射的回波信号间相干叠加,经叉指换能器的正向压电效应,将反射的声表面波转换为射频信号并通过传感器天线发射出去,由读写器接收并检测出频率信息,回波信号频率值反映了传感器探测点的温度信息[8,9]。
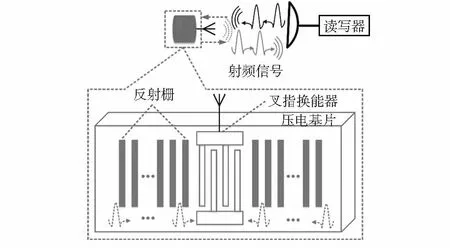
图1 声表面波温度传感原理Fig 1 Principle of surface acoustic wave(SAW) temperature sensing
传感器中心谐振频率f和探测点温度T间的关系为[10,11]
f(T)=f(T0)[1+b1(T-T0)+b2(T-T0)2+…]
(1)
式中b1为一阶温度系数,b2为二阶温度系数。选出一阶温度系数高而其他阶温度系数小的晶体切向,可使传感器中心谐振频率随温度线性变化。探测传感器的中心谐振频率,解算出当前传感器探测点的温度值,以此实现温度传感。由于电力设备在线监测所需的温度探测点较多,因而需要研究温度传感器的组网特性。
2频率扫描方法
2.1传感器的频率响应曲线
采用δ函数分析方法对图1所示的谐振腔体结构进行理论建模,传感器频率响应与扫描频率间的函数关系[12]为
(2)
式中N为反射栅对数,ω0为传感器的中心谐振频率,Δω为读写器发出的扫描频率与中心谐振频率的差值,E0,Es分别为归一化电场强度和感应电场强度。
式(2)仿真得到理想频率响应曲线如图2所示。可以看出,在频率响应大于-40 dB范围内进行频率扫描,1#,2#传感器间频率相差1.4 MHz,不会发生串扰。
同一传感器在不同温度下的中心谐振频率会发生变化,如图3所示,随着探测点温度的升高,传感器中心谐振频率将会逐渐增大,传感器频率响应曲线将随着温度的升高而整体向右移动。探测点的温度在-20~120 ℃间变化时,每一个温度对应唯一的一条传感器频率响应曲线,通过频率扫描测量出该温度下的中心频率,即可解算出探测点的温度。

图2 室温下(25 ℃)不同SAW传感器的理想频率响应曲线Fig 2 Ideal frequency response curves of different SAW sensors at 25 ℃

图3 不同温度下同一SAW传感器的理想频率响应曲线Fig 3 Frequency response curve of the same SAW sensor under different temperatures
2.2频率分级扫描方法
对于在25 ℃时中心谐振频率为432.3 MHz的2#传感器来说,当所测温度在-20~120 ℃范围内变化时,需在431.9~433.1 MHz间进行扫频,根据回波信号强度解算中心谐振频率。扫频步长设置越小,扫频次数越多,传感器的温度响应时间也就越长,需综合考虑测量精度和响应时间来确定扫频步长。为保证±1 ℃的温度传感器精度,一般选择扫频步长Δf1=3 kHz,需要扫频401次。扫描频率点及其相应频率响应如图4所示。每次扫描均包含多个信号发射、响应、解调等环节,增加一次频率扫描将带来较大的响应时间延迟。
为提高传感器的响应速度并兼顾精度,本文提出一种频率分级扫描方法。该方法利用传感器频率响应函数在中心谐振频率两侧分别单调变化的特点,将扫频过程分为粗精2个等级,在粗扫频阶段,选择较大的扫频步长,快速逼近至中心谐振频率附近,将中心谐振频率限制在两个粗扫描频率间隔范围内;精扫频阶段在该范围内以更小的扫频步长扫描,实现中心谐振频率的高精度测量。采用粗精分级的频率扫描方法,可降低扫频次数,提升传感器的响应速度,对传感器网络中温度传感器轮流查询具有重要意义。

图4 传感器中心谐振频率检测(3 kHz单一间隔频率扫描)Fig 4 Central resonant frequency detection of SAW sensor (frequency scanning at the interval of 3 kHz)
图5以2#传感器为例,反映了频率分级扫描方法的实现过程。在1.2 MHz范围内,粗扫频阶段扫频步长Δf2=50 kHz,需要扫描25次,并探测对应的回波信号强度,找到强度最高的三个频率点,该频率区间大小为两个粗扫频步长之和100 kHz,则传感器的中心谐振频率处于该区间;为保证±1 ℃的温度传感器精度,精扫频阶段扫频范围为100 kHz,扫频步长Δf3=3 kHz,需要扫描34次。采用粗精分级频率扫描方法,需要扫频59次,与分级前的401次相比,传感器在扫频上所需的时间约为原来的1/7,可有效提升传感器的响应速度。

图5 传感器中心谐振频率检测(50 kHz和3 kHz频率分级扫描)Fig 5 Central resonant frequency detection by frequency grading scanning of 50 kHz and 3 kHz
3频率分级扫描方法实验研究
针对本文提出的频率分级扫描方法开展声表面波温度传感实验研究,搭建了发射频率可灵活调节的射频收发电路,如图6和图7所示。该电路可在粗扫频阶段发射不同频率信号,探测相应激励下的声表面波传感器回波信号强度,并在智能判别得到精扫频频率区间;在精扫频阶段,该电路以更小的扫频步长精确探测传感器的中心谐振频率,实现温度传感功能。

图6 频率信号收发电路Fig 6 Transceiver circuit for frequency signal

图7 基于LabVIEW软件的频率信号监测平台Fig 7 Frequency signal monitoring platform based on LabVIEW
实验中,采用NI公司的PXI—5661矢量信号分析仪,监测射频收发电路的频率信号发射时序,并探测2#传感器在不同频率激励下的回波信号,实验结果如图8所示。2#传感器在25 ℃室温下的中心谐振频率约为432.3 MHz,在粗扫频实验阶段,射频收发电路先以50 kHz的频率间隔发射了22组频率信号,比较不同频率信号激励下传感器的回波信号强度,将精扫频范围限定在0.100 6 MHz以内;精扫频阶段以3 kHz的频率间隔发射信号激励传感器,根据回波信号强度解算出待测点温度。为增强传感器的抗干扰性能,粗扫频和精扫频可重复多次。

图8 温度传感过程中的频率分级扫描时间曲线Fig 8 Frequency hierarchical scanning time curve during temperature sensing process
随后研究声表面波传感器的温度测量不确定度和不同传感器的测量一致性。将传感器置于温箱中,在30 ℃时进行校准;将温度降低到-10 ℃,以10 ℃为间隔分段升温到120 ℃,各温度均恒温20 min。将传感器在每段恒温的温度测量值与实际温度对比,2#传感器的温度传感不确定度温度误差为-5~4 ℃,与电网中需要的±1 ℃精度需求还有较大差距。可对温度传感结果进行多次测量取温度均值等后处理,有望得到电网所需的精度。
将6只传感器均放入温箱中,在30 ℃时进行校准,采用上段相同的温度循环方法,观察各个传感器的温度传感结果,如图9,1#~6#传感器的温度测量一致性所示。因在30 ℃进行温度校准,它们在30 ℃时测量值基本一致;随着温度的升高,各传感器间的温度测量值差异增大,最大差异约为10 ℃。尽管每个传感器的温度曲线线性度较好,但在温度传感一致性方面仍需继续提升。由于温度传感器在电力系统中一般用于高温预警,在使用中可在高温区进行温度校准,以获得更好的电力应用适应性。

图9 1#~6#传感器的温度测量一致性Fig 9 Inconsistency of 1#~6# sensors in temperature measurement
4结论
本文介绍了声表面波温度传感器的原理和组网方法,针对电力设备温度在线监测需求中的实时性要求,为了提高单个温度传感器的响应速度,有效降低传感器组网后的温度轮流查询时间,提出了频率分级扫描方法。该方法通过设置粗扫频和精扫频2个阶段,在保证中心谐振频率检测精度的前提下,将扫描时间缩短为原来的1/7。对声表面波温度传感器开展了实验研究,研究了单传感器与多传感器的温度测量一致性问题,讨论了实验结果并指明了继续提高传感器性能的方向。声表面波温度传感器具有无源无线的工作特征,尤其适合电力等具有复杂电磁环境的应用场合,优异的抗干扰性能和绝缘性能将使其在未来电力设备温度在线监测中发挥重要作用。
参考文献:
[1]Gungor V C,Lu B,Hancke G P.Opportunities and challenges of wireless sensor networks in smart grid[J].IEEE Transactions on Industrial Electronics,2010,57(10):3557-3564.
[2]叶韬,金浩,董树荣,等.无线无源声表面波传感器研究进展[J].传感器与微系统,2014,33(12):1-4.
[3]王军峰,李平,周志坤,等.声表面波谐振型无源无线温度传感器硬件系统[J].压电与声光,2006,28(1):1-4.
[4]Müller A,Konstantinidis G,Buiculescu V,et al.GaN/Si-based single SAW resonator temperature sensor operating in the GHz frequency range[J].Sensors and Actuators A:Physical,2014,209:115-123.
[5]张领,刘文,王磊.基于极化和复用的SAW传感器阵列[J].传感器与微系统,2012,31(3):78-80.
[6]李平.无源无线声表面波传感器及仪器系统研究[D].重庆:重庆大学,2003.
[7]阮鹏,陈智军,付大丰,等.基于COMSOL的声表面波器件仿真[J].测试技术学报,2012(5):422-428.
[8]周金.基于声表面波技术的无线通信系统的研究[D].天津:南开大学,2010.
[9]Malocha D C,Gallagher M,Fisher B,et al.A passive wireless multi-sensor SAW technology device and system perspective-s[J].Sensors,2013,13(5):5897-5922.
[10] 龚贻文.声表面波温度传感器及其通信天线的研究[D].武汉:华中科技大学,2012.
[11] 吴展翔,刘文,卢小荣.声表面波温度传感器的仿真与设计[J].压电与声光,2014,36(1):8-11.
[12] 卢小荣.无源无线声表面波温度传感器及应用方案设计[D].武汉:武汉邮电科学研究院,2012.
Research on frequency grading scanning method for surface acoustic wave temperature sensor
ZHENG Tian-xiang,LI Lu,CHEN Shuo
(Smart Grid Research Institute,State Grid,Beijing 102200,China)
Abstract:Frequency responses of surface acoustic wave(SAW)resonators are monotonous in single side around resonant frequency,a grading scanning method is proposed to enhance response speed of SAW sensor for temperature sensing.The scanning method contains two frequency scanning levels,named as the coarse-level and the fine-level.With the method,scanning time of the SAW sensor for temperature is reduced to 1/7.The experiments are performed to testify the effectiveness of the method.The uncertainty with a single SAW sensor and the inconsistency of multi-SAW sensors on temperature measurement are extracted by the experiments,experimental results are analyzed.
Key words:surface acoustic wave(SAW);temperature sensor;frequency scanning;grading scanning
DOI:10.13873/J.1000—9787(2016)05—0028—04
收稿日期:2015—09—28
中图分类号:TM 932
文献标识码:A
文章编号:1000—9787(2016)05—0028—04
作者简介:
郑天祥(1987-),男,黑龙江七台河人,博士,主要研究方向为电力传感器与系统。
