一种鲁棒的消失点估计算法
2016-05-14王锐杨晓华孙常存
王锐 杨晓华 孙常存
摘要:本文提出了一种在复杂的道路环境图片中估计消失点的算法。通过先验信息分析消失点在图片中的候选区域,去除大量的干扰直线段,再用哈夫变换将候选直线段投影到参数空间,并结合直线段的长度使用加权最小中值二乘法来求解消失点的位置。实验中使用多种复杂场景的图片测试算法的可靠性,结果表明本文算法相对传统算法具有更高的消失点精度和鲁棒性。
关键词:哈夫变换;消失点;加权最小中值算法;直线段检测;
中图分类号:TP391 文献标识码:A 文章编号:1674-098X(2016)02(c)-0000-00
Abstract:This paper describes an approach for vanishing point (VP) estimation in the real environment road images. VP predicated region in the image are computed through prior information; which can remove the source of the disturbances of a large number of noise line segments. Then using Hough Transform the candidate line segments in image coordinate are projected into the points in parameter space where VP is estimated by a length of line segments weighted least median square method. During the experiment, many real environment road images were used to test our method. The experimental results reveals that our method is more accuracy and robust than traditional method.
Keywords-Hough Transform; vanishing point; Weighted LMS; line segments detection
中图分类号: 文献标识码:A
0 引言:
三维空间中的一组平行直线由摄像机针孔模型投影到二维图像平面为一组相交的直线,这些线的交点称为消失点。消失点可以消去图像透视,实现摄像机姿态估计、摄像机自标定等多种重要的功能,在人造的环境中消失点的应用更为明显,因此消失点估计是计算机视觉领域一个非常热门的研究。道路图像消失点是指纵向的车道线在图像平面的交点。
自Barnard提出在数字图像中使用哈夫变换计算消失点的算法[6]以来,基于哈夫变换检测道路车道线和消失点的算法不断被改进。算法[5]将提取到图像中的边缘利用哈夫变换投影到参数空间中,然后用最小二乘法(LS)计算消失点所对应的正弦曲线。虽然结构化道路中车道线边缘明显,但是实际上图像中还存在很多杂乱的边缘结构,如路旁树木、道路标志、车辆、阴影等诸多的因素都会对消失点的估计造成干扰,不能直接利用LS算法估计消失点。算法[2]提出了一种加权的最小二乘法,增强了LS算法抗噪声的能力,但对于复杂道路场景的各种噪声,却不能正确的估计消失点的位置。
基于道路平坦、车道线平行的假设,本文提出了一种鲁棒性更强的估计消失点的算法。相对于以前的研究工作,一是在图像中检测直线段代替以前算法在参数空间中用投票机制检测直线段;二是通过直线段约束去除大量噪声直线段;三是用一种加权最小中值算法代替了最小二乘法求消失点。
1 直线段约束
用梯度方向邻域增长的方法[3]检测道路图像中的直线段结构,得到了直线段的中心 ,直线段的斜率 ,以及直线段所包含同一梯度方向的像素个数 (简称直线段长度)。理想的估计消失点的直线段是前向车道线的边缘,但实际上算法会提取到其它各种的直线段。大量噪声直线段不仅会增大后续处理的计算量和复杂程度,而且会影响消失点估计的精度,甚至会造成消失点估计错误,所以必须尽力剔除和消失点无关的直线段。步骤如下:
1、 由于车道线通常拥有连续较长的边缘结构,而细小边缘结构多数对应的是噪声,所以首先去掉长度较短的直线段。
2、 消失点候选区域
消失点与摄像机相对车道线的航向角、摄像机相对路面俯仰角之间的关系[1]可表示为:
式中, 是摄像机的焦距(单位:pix), 和 分别是摄像机的俯仰角和航向角(单位:rad)。实际上,可以预先估计摄像机安装的俯仰角,运动中航向角变化通常只在0°左右以一定幅度变化, 由摄像机事先标定得到,所以由(1)(2)可推导出消失点 在图像上所处的区域。
3、 剔除直线段中含有像素的纵坐标小于 的直线段。
4、 剔除不经过消失点区域的直线段,得到候选直线段。
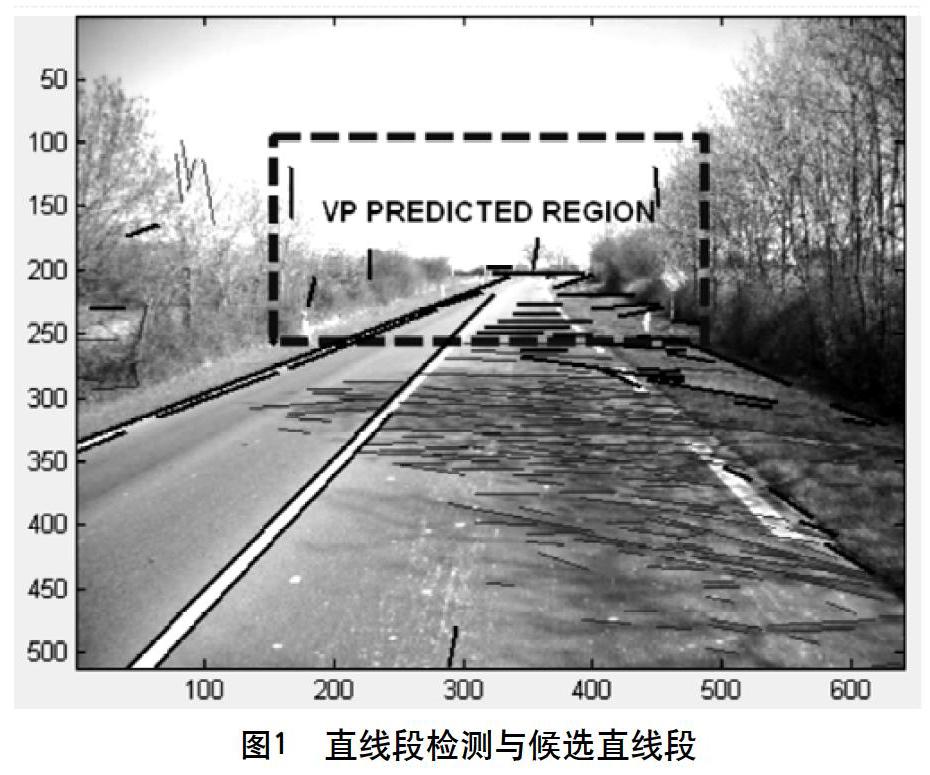
当分辨率为512pix*640pix,焦距 ,俯仰角 : ,航向角 : ,按照式(1)和式(2)可计算得出消失点候选区域 : , ,如图1中虚线四边形区域所示。图中实直线段代表检测到的直线段,包括噪声直线段(路旁树枝树干、树枝阴影、草丛等)和车道线边缘。细线代表不经过候选区域的直线段,粗线代表满足约束条件的候选直线段。
从图1中可见此操作过程剔除了大量的噪声直线段,而传统算法[2,5]并没有专门的处理此类噪声,必然导致消失点估计错误。
2 哈夫变换
哈夫变换(HT)的主要思想是将图像平面中点和线的坐标与参数空间联系起来[2]。图像空间中的一个点 对应为参数空间 中的一条正弦曲线,可表示为:
图像中一条直线 ,它在参数空间 中对应点的坐标,可表示为:
根据图像空间和参数空间的对应特性,通过将图1中检测到的直线段结构用式(4)映射为参数空间中的点,理论上这些点恰好在消失点所对应的正弦曲线上,可表示为:
式中, 是第 条直线段在参数空间中的坐标, 是估计的消失点的位置。对于大部分属于车道标志线边缘的直线段来说,在参数空间中的映射点 主要分布在正弦曲线 附近,而其余不规律的直线段结构在参数空间中的映射点的位置则没有固定的模式。
3 基于加权LMS算法的消失点估计
为了尽可能的消除噪声对式(5)中消失点解的影响,通常使用最小中值二乘法(LMS)[7]代替最小二乘法(LS)解式(5),其LMS算法可表示为:
当候选直线段大多数属于车道线边缘的直线段时,LMS算法都能正确的估计消失点的位置。但当噪声直线段的数目总和占多数时,LMS算法失效[4],造成了错误的消失点估计。一种加权的LMS算法可以改善上述问题,其算法表示为:
式中 。 是由直线段长度 决定的权值。加权的LMS算法的实质是在参数空间中恢复由哈夫变换损失的直线段长度,并将其作为LMS算法的权值。由于长的直线段很有可能属于车道线边缘,所以算法充分考虑了车道线边缘对消失点的影响。
4 实验结果与分析
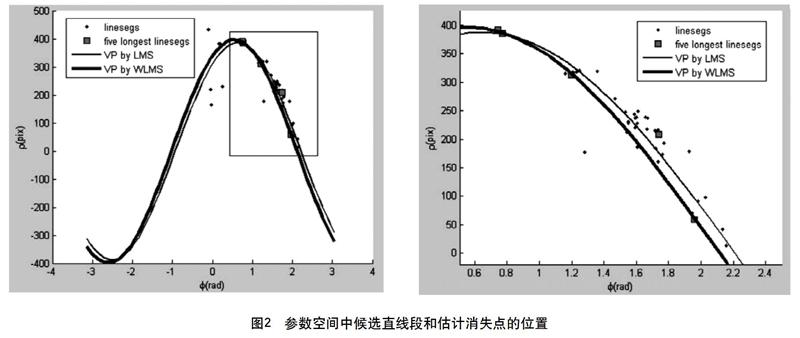
将图1中候选直线段经过哈夫变换式(4)变换到参数空间中的点,如图2所示。图中,细正弦曲线(传统LMS算法)经过所有点的中心位置,而粗正弦曲线(加权LMS算法)则经过了5个权重最大的点中的4个点,其中第5个点对应图像空间中的一条噪声直线段。
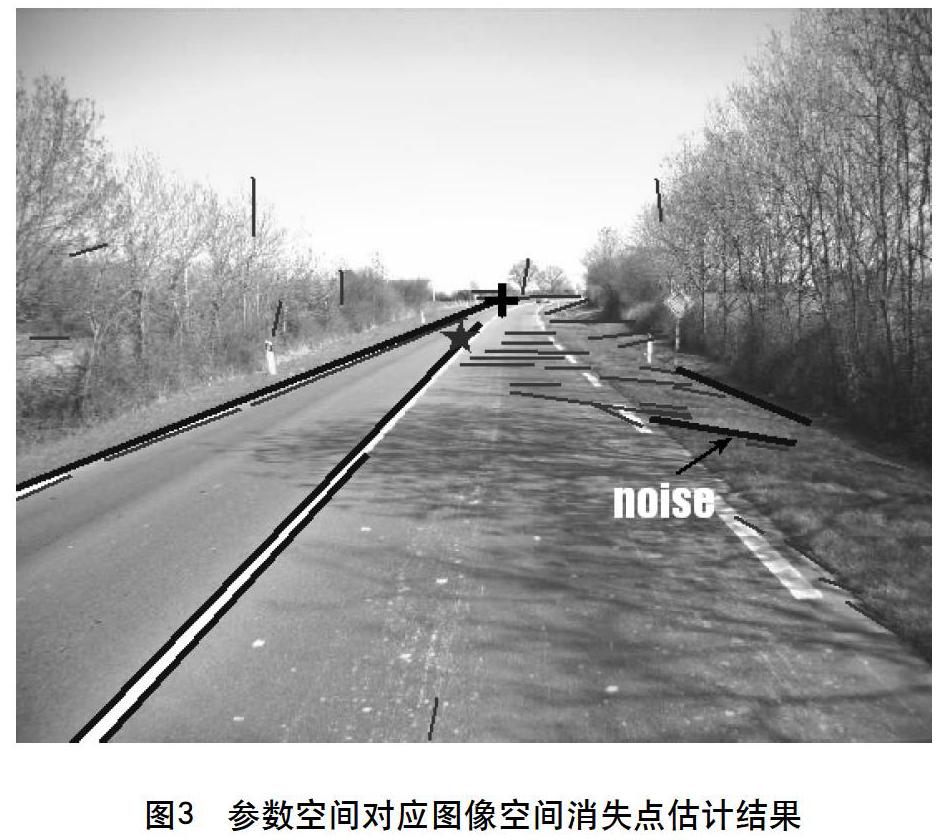
图3为参数空间对应图像空间的消失点估计结果。图中,粗直线段代表5条权重最大的候选直线段,传统LMS算法(‘★)因为噪声直线段占多数而失效,而加权LMS算法(‘+)正确的估计了消失点的位置。加权LMS算法结合了直线段在图像空间的长度信息和在参数空间下的位置信息,在参数空间中恢复了图像中直线段的长度信息,所以正确的估计了消失点的位置。
为了验证算法的可靠性,选用了多种复杂道路场景图片进行实验测试,结果如图4所示。图中,候选直线段约束已经过滤了大量属于噪声直线段,粗直线段代表5条权重最大的候选直线段,‘+代表本文算法估计的消失点的位置。可以看出,在多种复杂场景中(道路行人场景、道路标志场景、道路分支场景、摄像机低分辨率高速运动等场景),本文算
法都可以较准确的估计消失点的位置。
5 总结
本文提出了一种基于直线段哈夫变换估计道路消失点的方法,通过引入直线段候选区域约束和加权LMS算法增加了消失点估计算法的鲁棒性。主要优点有:1、利用先验信息分析消失点的区域,将大量噪声直线段剔除,只使用可能经过消失点区域的直线段估计消失点。这样操作不仅节约了后续算法的计算量,同时也降低了消失点估计错误的概率。2、加权LMS算法在参数空间中恢复了直线段的长度信息,不仅提高了传统LMS算法的精度,而且具有更强的抗噪声能力,在多种复杂情况的路面上都能正确的估计消失点位置。
参考文献
[1] A. Guiducci, “Parametric model of the perspective projection of a road with applications to lane keeping and 3D road reconstruction,” Computer Vision and Image Understanding, vol. 73, pp. 414–427, 1999.
[2] Jian Wu, “ An Improved Hough Method for Vanishing Point Estimation and Its Application in Road Image,”2010 Second International Conference on Future Computer and Communication,pp.295-298,September 28-29,2010.
[3] 覃勋辉,马戎,付维平,等.一种基于梯度的直线段检测算法[J], 2012 Vol. 41 (2): 205-209.
[4] R. Hartley and A. Zisserman. Multiple View Geometry in Computer Vision. Cambridge University Press, Cambridge,UK, second edition, 2004.
[5] Liu Hua-jun, "A Fast Method for Vanishing Point Estimation and Tracking and Its Application in Road Images," ITS Telecommunications Proceedings, 2006 6th International Conference on , vol., no., pp.106-109, June 2006
[6] S.T. Barnard, “Interpreting perspective images”, Artificial Intelligence, vol. 21, pp. 435-426, 1983.
[7] Peter J. Rousseeuw, Annick M. Leroy;. “Robust Regression and Outlier Detection,”Wiley, October 1987.
