磁悬浮球形主动关节转子位置与姿态检测研究
2016-04-22张小红
张小红,曾 励
(扬州大学 机械工程学院,江苏 扬州 225127)
磁悬浮球形主动关节转子位置与姿态检测研究
张小红,曾励
(扬州大学 机械工程学院,江苏 扬州225127)
摘要:磁悬浮球形主动关节采用一种基于球形转子的类球形特殊结构的电机.转子位姿检测是磁悬浮球形主动关节运行的重要环节,主要包括转子的位置检测和姿态检测.在球形主动关节上建立三维坐标系,提出转子位置和姿态的数学表达式,基于MEMS陀螺仪测量转子加速度和角速度,计算转子的姿态矩阵,得出转子的姿态角和球心的位置坐标.通过实验验证了转子位姿检测系统数学模型与位姿公式的正确性.
关键词:磁悬浮球形感应电动机;位姿;位置检测;姿态检测
球形主动关节可提供多个自由度,从而极大地简化了机构的复杂度,提高了定位精度和响应速度,同时还缩小了机构体积,能够快速定位.转子位姿检测是磁悬浮球形主动关节精确控制必不可少的一部分,检测的精度对关节的控制性能有很大影响[1-2].目前已提出的球形电动机转子检测方法:一种是采用滑轨支架测量系统,用三个独立的增量式光学旋转编码器来获得转子位置信息,该检测方案属于接触式检测,转子与导轨相连接,增加了摩擦力,影响了转子的动态响应及定位精度;另一种是用视觉传感器来获取转子表面图像, 然后分析得到转子位置的非接触式检测方法,它可避免与转子相连接,是当今的发展趋势[3-4],但测量系统相对比较复杂.
本文主要采用基于微惯性传感器组件的非接触式位姿检测装置.首先建立了磁悬浮球形主动关节的三维坐标系,然后推导球形转子在空间三维坐标系下的位姿描述.基于微惯性传感器测量原理,构建转子位姿检测系统,在陀螺仪和加速度计基础上检测转子位置和姿态.
1关节转子位姿的数学描述
1.1建立三维坐标系
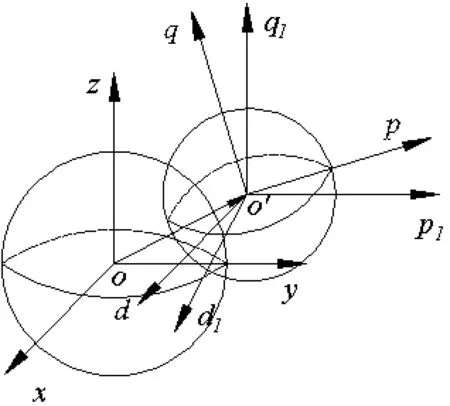
图1 三维坐标系
在磁悬浮球形主动关节及其控制系统的研究中,需要用到多种三维坐标系.本文建立以下几种三维坐标系,如图1所示[5].
1)静止坐标系xyz,固定于三维球形主动关节定子上,x、y、z轴分别与定子绕组正交的Wx、Wy、Wz的轴线一致.
2)过渡坐标系d1p1q1,原点与转子动坐标系的原点重合,其空间姿态与静止坐标系相同,即过渡坐标系3个轴线方向与静止坐标系的3个轴线方向相同.
3)转子动坐标系dpq,建立在关节转子上,d、p、q轴分别与转子上的3个正交绕组Wd、Wq、Wp轴线一致.
1.2关节转子的位置描述
在静止坐标系中,转子球心P的位置可以用3×1的位置矢量表示:P=[xyz]T[6].假设初始时刻已知球形转子球心位置,若已知该转子运动任意时刻的加速度,则可通过建立位移与加速度的关系式来求得转子球心在任意时刻的位置坐标,公式为
(1)
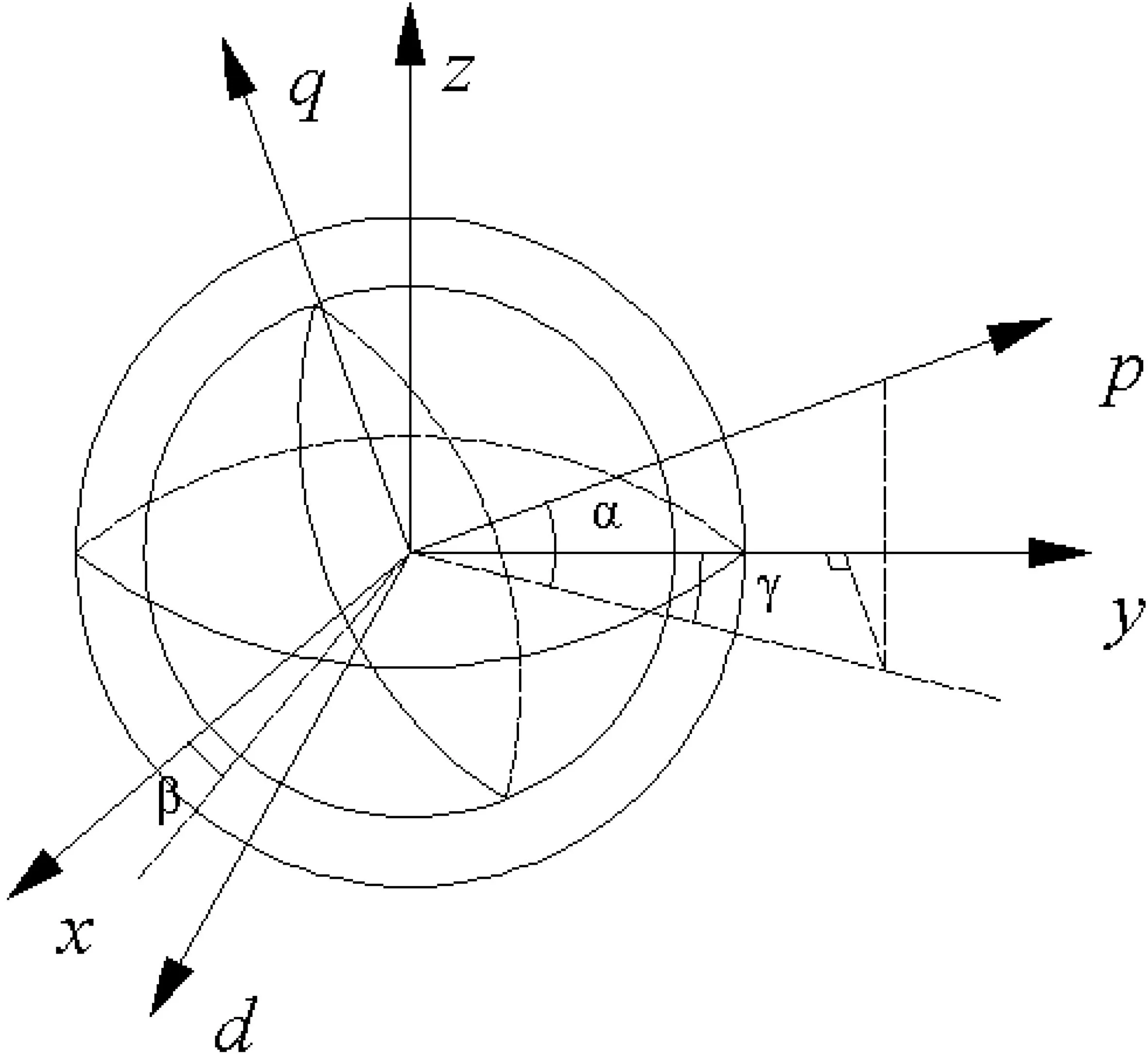
图2 转子姿态角示意图
1.3关节转子的姿态描述
在磁悬浮球形主动关节当中用固定于转子的动坐标系dpq来描述转子的空间姿态.采用过渡坐标系相对于动坐标系来说,原点在同一个位置,只是方向不同,则可通过3次不同方向的连续转动使动坐标系与过渡坐标系相重合,每次转动的角度叫做欧拉角,即姿态角.本文用α,β,γ来表示转子的姿态角[7],如图2所示.

(2)

(3)
同理,可知从转子动坐标系到静止坐标系之间的变换可以得到

(4)
由上式可知,如果已知姿态矩阵中的每个元素,则反过来求得姿态角的大小,其计算公式为
(5)
2关节转子的位置与姿态检测原理
2.1基于陀螺仪的姿态检测原理
(6)
其中:Uxz、Uyz、Uxy值由ADC读取,表示绕y、x、z轴的转动;Vω0是零变化率电压,即陀螺仪不受任何转动影响时的输出值;V0是参考电压;S是陀螺仪的灵敏度,单位为mV/(°/s).
由式(6)可知转子三轴角速率可通过陀螺仪测得,表示转子姿态角的姿态变换矩阵C,可采用四元数算法求解.四元数姿态表达式是一个四参数的表达式,其基本思路是一个坐标系到另一个坐标系的变换可以通过绕一个定义在静止坐标系矢量的单次转动来实现[10].四元数用符号Q表示,为具有4个元素的矢量.

(7)
四元数微分方程为
(8)
其中:ω=0+ωxib+ωyjb+ωzkb,为过渡坐标系相对于静止坐标系的角速度矢量的四元数表达形式.将Q代入,根据四元数运算法则,可得

(9)
根据姿态矩阵与四元数的关系,可得用四元数表示的欧拉角公式
(10)
2.2基于加速度计的位置检测原理
根据牛顿第二定律,F=ma,可知加速度计是测量运动物体在受到外力作用后,根据受力所得到的物体运动加速度.加速度计的输出是单位检测质量所受到的惯性空间的合力,即比力,加速度计测量的是比力的大小.根据加速度计的输出可知
(11)
其中:Vg是零加速度的电压值,通过计算相对0g电压的偏移量可以得到一个有符号的电压值.
由式(1)可知,只要测出转子的运动加速度,转子在任何时刻的速度和相对出发点的距离就可以实时计算.由于测试原因,所测得的加速度信号均值可能不为0,经过二次积分后,位移振幅将产生严重偏移趋势项,极大地影响了测量的准确度.所以采用频谱转换法进行求解,将加速度谱转换成位移谱来测量振动位移信号[11-12].用频谱转换法将加速度信号转换成位移信号如下:

(12)
2)通过下式计算各加速度谐波分量的幅值Aak,圆频率ωk和初相角φak.
(13)


3关节转子实验研究
3.1系统总体设计
磁悬浮球形主动关节转子运动姿态检测系统主要由两部分组成,即运动转子和外界接收系统.运动转子作为单独部分,球形空心转子内部设置有姿态检测系统,其中包括MPU6050模块,电源模块和无线收发模块.MPU6050模块能够感知转子运动的加速度和自身转动的角速度,将这些数据经过内部芯片的初步处理后通过无线收发模块,将这些数据传递给外界接收系统进行后续处理.外界无线接收模块接收到这些数据利用USB串口传递给上位机,上位机接收到这些原始数据经过处理,得到运动转子的一些运动状态,并且实时显示和保存这些数据.系统总体设计如图3所示.

图3 系统总体框图
3.2传感器选用和相应电路
本文选用MPU6050六轴传感器作为姿态检测系统的主要测量元件,选用HC-06作为检测系统的无线发射接收元件.姿态检测系统以等时间间隔采集MEMS传感器即三轴加速度计、三轴陀螺仪的信号.MPU6050作为转子姿态惯性敏感器件9轴运动处理传感器,集成了三轴MEMS陀螺仪、三轴MEMS加速度以及1个可扩展的数字运动处理器,可以由I2C接口连接数字传感器.以Cortex-M3内核的STM32作为微处理器,用于姿态检测系统信号处理的执行芯片.整个检测系统的硬件模块电路如图4所示.
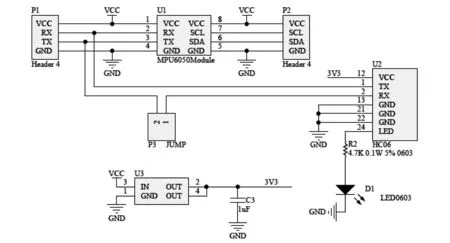
图4 硬件模块电路图
3.3实验结果
球形主动关节是一个完整的三维场模型,边界条件复杂,增加了磁性能、力矩分析的复杂性.为了计算方便,忽略气隙.图5、图6所示为转子实物和磁悬浮球形样机实验装置,通过调节输入电流信号,实现磁悬浮球形关节样机单方向旋转与悬浮,在控制系统的作用下,转子逐渐趋于平稳运动;在虚拟样机上可观察得到转子沿动态坐标系各轴的加速度、旋转角及角速度信号.图7、图8是转子初始时刻和运动的姿态角曲线,图9、图10是转子初始时刻和运动的位移曲线.

图5 MPU6050高精度姿态测量参考系统 图6 转子测量试验装置
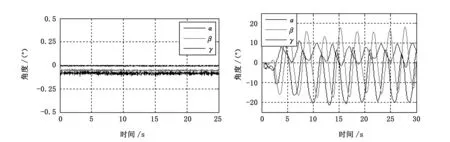
图7 初始时刻转子姿态角曲线 图8 转子姿态角曲线
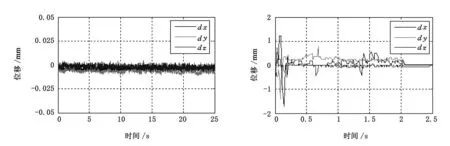
图9 初始时刻转子位移曲线 图10 转子运动位移曲线
在初始时刻,转子在平衡位置振动,当转子受到外力作用,在控制系统的作用下,转子的位移振动逐渐衰减,最终趋于稳定.假设将检测装置分别绕x,y,z轴转动指定角度,所得实验结果记录见表1.

表1 姿态角实验数据
由表1可看出,通过三轴角速度得出的姿态角数据与实际转过的角度近似,由此可知基于MEMS传感器的球形主动关节的位姿检测方法的可行性与正确性.
4结语
本文提出一种基于径向位移和角位移的磁悬浮球形主动关节转子位姿检测方法,建立转子位姿的数学模型.基于MEMS陀螺仪传感器的位姿检测研究表明,陀螺仪和加速度计可实时检测转子角速度和加速度.实验验证了转子位姿检测系统数学模型与位姿公式的正确性.该检测转子位置与姿态的方法对磁悬浮球形电动机的检测具有一定的实际意义.
参考文献:
[1] WANG J,JEWELL G W,HOWE D.Analysis,design and control of a novel spherical permanent2 magnet actuato[J].IEE Proc2 Elevtr Power Appl,1998,145(1):61-71.
[2] 王群京,钱喆,李争,等.基于机器视觉的永磁球形步进电动机转子位置检测方法[J].中国电机工程学报,2005,28(36):73-79.
[3] 杨军,曾励,刘静.磁悬浮球形磁阻电动机转子位姿描述与检测研究[J].机械制造与自动化,2011,40(3):148-152.
[4] 曾励,徐正杰.交流圆弧磁悬浮感应电机机制研究[J].徐州工程学院学报(自然科学版),2014,29(1):25-30.
[5] 曾励,张帆,徐媛媛.磁悬浮球形关节三维动力学模型与控制特性[J].机械工程学报,2011,21:69-75.
[6] 寇金桥,陈伟海,于守谦,等.三自由度球形电机位置测量研究[J].北京航空航天大学学报,2005,31(7):805-808.
[7] 黄声华.三维电动机及其控制系统[M].武汉:华中理工大学出版社,1998.
[8] 梁谷.基于MEMS 的捷联惯性导航系统的研究[D].哈尔滨:哈尔滨工程大学,2008.
[9] 吴冬冬.基于MEMS陀螺仪姿态检测系统研制[D].杭州:浙江理工大学,2014.
[10] 张秋阳.无人机姿态测算及其误差补偿研究[D].长沙:中南大学,2011.
[11] 徐媛媛.磁悬浮球形感应电机机理和有限元分析[D].扬州:扬州大学,2012.
[12] 江树生.捷联惯性导航系统中陀螺仪信号的数据采集及处理技术研究[D].哈尔滨:哈尔滨工程大学,2002.
(编辑武峰)
Research on Position and Orientation Detection of Magnetic Levitation Spherical Driving Joint
ZHANG Xiaohong,ZENG Li
(College of Mechanical Engineering,Yangzhou University,Yangzhou 225127,China)
Abstract:Magnetic levitation spherical driving joint is a kind of special structure of spherical based on the spherical rotor.The rotor position detection is an important part of the magnetic suspension spherical driving joint operation which includes the rotor position detection and gesture detection.A three-dimensional coordinate system is built on spherical joints and the rotor position and orientation of the mathematical expressions are presented.Based on the MEMS gyroscope,the rotor attitude angle and position coordinates are measured by sensors to detect the corresponding data to calculate the attitude matrix and position coordinates of the rotor.The experimental results verify the correctness of the mathematical model and formula of rotor position and orientation detection system.
Key words:magnetic levitation spherical driving joint;position and orientation;position detection;gesture detection
中图分类号:TM346
文献标志码:A
文章编号:1674-358X(2016)01-0081-06
作者简介:张小红(1989-),女,硕士研究生,主要从事磁悬浮及控制检测的研究.
基金项目:国家自然科学基金项目(51375427);江苏省自然科学基金项目(BK20131232)
收稿日期:2015-09-16
